平行度检测方法及平行度检测装置
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及检测及校准技术领域,尤其涉及一种平行度检测方法及平行度检测装置。
背景技术
在半导体制造以及应用技术中,经常需要对两个平面之间的平行度进行检测,以确保后续制程工艺的顺利实施或者确保半导体器件的正常使用。例如,在机械部件安装过程中,需要确保两个部件的接触面平行,以确保安装后机械结构的稳定性;再例如,在晶圆键合工艺中,需要确保待键合的两片晶圆相对的表面平行,以确保键合工艺的顺利实施以及键合后两片晶圆之间的键合强度。然而,当前只能通过工程师主观目测的方式来确认两个平面之间是否平行,这不可避免的会带来人为主观因素的影响。人为目测的方式不仅费时费力、效率低下,而且准确度较低。
因此,如何提高两个平面之间平行度检测的准确度,避免人为主观因素对平行度检测结果的影响,是当前亟待解决的技术问题。
发明内容
本发明提供一种平行度检测方法及平行度检测装置,用于解决现有技术在检测两个平面的平行度时准确度较低的问题,避免人为主观因素对平行度检测结果的影响。
为了解决上述问题,本发明提供了一种平行度检测方法,包括如下步骤:
提供一标准平面;
于待测平面上选取一目标位置,并进行多次循环步骤,获取多个所述目标位置与所述标准平面之间的测试距离;
判断多个所述测试距离是否均相等,若否,则确认所述待测平面与所述标准平面不平行;
所述循环步骤包括:
旋转所述待测平面一预设角度,获取旋转后的所述目标位置与所述标准平面之间的测试距离。
可选的,在沿所述标准平面指向所述待测平面的方向上,所述待测平面的投影完全位于所述标准平面内。
可选的,进行多次循环步骤之前,还包括如下步骤:
于所述目标位置固定一传感器,所述传感器用于检测所述目标位置与所述标准平面之间的距离。
可选的,所述传感器为激光传感器。
可选的,所述传感器沿垂直于所述待测平面的方向向所述标准平面发射检测光线;或者,
所述传感器沿相对于所述待测平面倾斜一阈值角度的方向向所述标准平面发射检测光线,所述阈值角度大于90度。
可选的,所述循环步骤包括:
旋转所述待测平面一预设角度,获取旋转后的所述目标位置与所述标准平面之间的测试距离;
统计所述待测平面已旋转的总的角度值;
判断所述总的角度值是否大于或者等于360度,若是,则结束所述循环步骤。
为了解决上述问题,本发明还提供了一种平行度检测装置,包括:
标准平面;
支架,所述支架的第一端用于固定一待测平面;
驱动模块,连接所述支架的第二端,用于驱动所述支架旋转;
处理模块,用于控制所述驱动模块多次旋转所述支架,并获取每次旋转后的所述待测平面上一目标位置与所述标准平面之间的测试距离;
判断模块,用于判断多个所述测试距离是否均相等,若否,则确认所述待测平面与所述标准平面不平行。
可选的,在沿所述标准平面指向所述待测平面的方向上,所述待测平面的投影完全位于所述标准平面内。
可选的,所述处理模块包括:
传感器,用于固定于所述待测平面上的所述目标位置。
可选的,所述传感器为激光传感器。
可选的,所述传感器沿垂直于所述待测平面的方向向所述标准平面发射检测光线;或者,
所述传感器沿相对于所述待测平面倾斜一阈值角度的方向向所述标准平面发射检测光线,所述阈值角度大于90度。
可选的,所述处理模块还用于在每次控制所述驱动模块旋转所述支架之后,统计所述待测平面已旋转的总的角度值,并判断所述总的角度值是否大于或者等于360度,若是,则结束所述循环步骤。
本发明提供的平行度检测方法及平行度检测装置,通过多次旋转待测平面,在每次旋转后获取所述待测平面上同一目标位置与所述标准平面之间的测试距离,并通过判断多次获取的测试距离是否相等来检测所述待测平面与所述标准平面是否平行,提高了两个平面之间平行度检测的准确性,避免了人为主观因素对检测结果的影响,而且操作简单,检测效率高。
附图说明
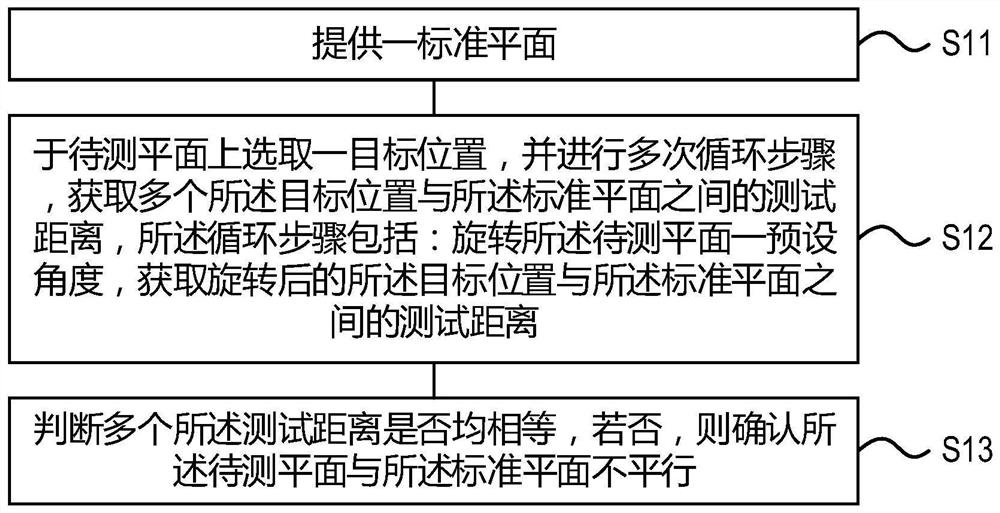
附图1是本发明具体实施方式中平行度检测方法的流程图;
附图2A-2F是本发明具体实施方式在检测平行度的过程中的示意图;
附图3是本发明具体实施方式中平行度检测装置的结构框图。
具体实施方式
下面结合附图对本发明提供的平行度检测方法及平行度检测装置的具体实施方式做详细说明。
本具体实施方式提供了一种平行度检测方法,附图1是本发明具体实施方式中平行度检测方法的流程图,附图2A-2F是本发明具体实施方式在检测平行度的过程中的示意图。如图1、图2A-图2F所示,本具体实施方式提供的平行度检测方法,包括如下步骤:
步骤S11,提供一标准平面20。
具体来说,所述标准平面20应具有平坦的表面,以便于后续测定所述标准平面20与待测平面21之间的距离。为了简化操作步骤,本具体实施方式中以一墙面作为所述标准平面20。在进行平行度检测的过程中,所述标准平面20的位置是固定不变的。
步骤S12,于待测平面21上选取一目标位置211,并进行多次循环步骤,获取多个所述目标位置211与所述标准平面20之间的测试距离;所述循环步骤包括:
旋转所述待测平面21一预设角度,获取旋转后的所述目标位置211与所述标准平面20之间的测试距离。
可选的,在沿所述标准平面20指向所述待测平面21的方向上,所述待测平面21的投影24完全位于所述标准平面20内。
图2A是表明所述标准平面20与所述待测平面21之间相对位置关系的侧视图,图2B是表明所述标准平面20与所述待测平面21之间相对尺寸大小的俯视图。图2C-图2F是在对所述待测平面21与所述标准平面20之间的平行度检测时的示意图。具体来说,如图2C所示,所述待测平面21位于所述标准平面20外部,且所述待测平面21与所述标准平面20之间间隔一定距离,即所述待测平面21与所述标准平面20不接触。所述标准平面20的尺寸应大于所述待测平面21的尺寸,使得所述待测平面21沿所述标准平面20指向所述待测平面21方向上的投影24完全位于所述标准平面20内。所述标准平面20与所述待测平面21之间的相对尺寸关系,本领域技术人员可以根据实际需要进行设置,举例来说,所述标准平面20的尺寸可以为所述待测平面21尺寸的2倍~10倍。
本具体实施方式中所述的待测平面21可以任何需要进行平行度校准的平面。所述目标位置211可以是所述待测平面21上的任意位置,因为当所述待测平面21与所述标准平面20平行时,所述待测平面21上任意位置的点到所述标准平面20的距离(即所述待测平面21上任意位置的点与所述标准平面20之间的垂直距离)都是相等的。在本具体实施方式中,为了便于测量,可以将所述目标位置211选择在所述待测平面21的拐角处,例如当所述待测平面21为矩形时,所述目标位置211可以为所述待测平面21的四个角中任一个角所在的位置。
可选的,进行多次循环步骤之前,还包括如下步骤:
于所述目标位置211固定一传感器,所述传感器用于检测所述目标位置211与所述标准平面20之间的距离。
可选的,所述传感器为激光传感器。
具体来说,在整个检测过程中,所述传感器发射测试信号的方向固定不变,所述测试信号用于检测所述目标位置211与所述标准平面20之间的距离。为了简化所述待测平面21与所述标准平面20之间距离的测量步骤,可以在所述待测平面21的所述目标位置211固定一激光传感器,通过所述激光传感器向所述标准平面20发射检测光线,来获取所述标准平面20与所述目标位置211之间的距离。为了进一步提高平行度检测的准确度,所述激光传感器的精度至少应为±5mm,例如所述激光传感器的精度为±3mm。
可选的,所述传感器沿垂直于所述待测平面21的方向向所述标准平面20发射检测光线;或者
所述传感器沿相对于所述待测平面21倾斜一阈值角度的方向向所述标准平面20发射检测光线,所述阈值角度大于90度。
举例来说,如图2C所示,固定于所述目标位置211的所述传感器可以沿垂直于所述待测平面21的方向向所述标准平面20发射检测光线,图2C中的虚直线表示位于所述待测平面21上不同位置的所述传感器发射的所述检测光线。再例如,如图2E所示,固定于所述目标位置211的所述传感器可以相对于所述待测平面21倾斜的向所述标准平面20发射检测光线,图2E中的虚直线表示位于所述待测平面21上不同位置的所述传感器发射的所述检测光线,所述检测光线与所述待测平面之间的阈值角度β可以为大于90度且小于或者等于135度。即只要确保所述传感器在整个平行度检测的过程中发射的检测光线的方向相对于所述待测平面保持固定不变即可。
可选的,所述循环步骤包括:
旋转所述待测平面21一预设角度,获取旋转后的所述目标位置211与所述标准平面20之间的测试距离;
统计所述待测平面21已旋转的总的角度值;
判断所述总的角度值是否大于或者等于360度,若是,则结束所述循环步骤。
旋转所述待测平面21一预设角度是指,所述待测平面21沿所述标准平面20指向所述待测平面21的方向穿过所述待测平面21中心的轴线自转一预设角度。具体来说,首先,获取未旋转之前所述目标位置211与所述标准平面20之间的测试距离(此时所述预设角度为0度),作为第一测试距离。进行第一次循环步骤:旋转所述待测平面21一预设角度,所述待测平面21中的旋转方向可以如图2D或者图2F中箭头所示的方向,并获取旋转一预设角度之后所述目标位置211与所述标准平面20之间的测试距离,作为第二测试距离;并判断所述第一次循环步骤旋转的所述待测平面21的总角度是否大于或者等于360度,若否,则进行第二次循环步骤;若是,则结束所述循环步骤。进行第二次循环步骤:从第一次循环步骤旋转后的位置开始继续旋转所述待测平面21一预设角度,旋转方向与所述第一次循环步骤的旋转方向相同,并获取旋转一预设角度之后所述目标位置211与所述标准平面20之间的测试距离,作为第三测试距离;并判断所述第一次循环步骤和第二次循环步骤旋转的所述待测平面21的总角度(即所述第一次循环步骤旋转和第二次循环步骤旋转的角度之和)是否大于或者等于360度,若否,则进行第三次循环步骤;若是,则结束所述循环步骤。进行第三次循环步骤:从第二次循环步骤旋转后的位置开始继续旋转所述待测平面21一预设角度,旋转方向与所述第一次循环步骤的旋转方向相同,并获取旋转一预设角度之后所述目标位置211与所述标准平面20之间的测试距离,作为第四测试距离;并判断所述第一次循环步骤、第二次循环步骤和第三次循环步骤旋转的所述待测平面21的总角度(即所述第一次循环步骤旋转、第二次循环步骤旋转和第三次循环步骤旋转的角度之和)是否大于或者等于360度,若否,则进行第四次循环步骤;若是,则结束所述循环步骤。以此类推,直至所述待测平面21旋转满一圈,即所述待测平面21的旋转轨迹能够形成一个完整的圆形。图2D和图2F中位于所述标准平面20上的虚线圆圈表示所述待测平面21在所述标准平面20上的投影24的旋转轨迹。
在执行所述循环步骤的过程中,每次旋转的角度可以相同,也可以不同,本领域技术人员可以根据实际需要进行设置,例如对平行的精确度要求越高,单次旋转的角度越小。
步骤S13,判断多个所述测试距离是否均相等,若否,则确认所述待测平面21与所述标准平面22不平行。
在执行的所有所述循环步骤中,都是沿同一方向获取旋转后的所述目标位置211与所述标准平面20之间的所述测试距离。例如,都是沿所述目标位置211垂直所述标准平面20的方向,或者都是沿所述目标位置211相对于所述待测平面21倾斜一阈值角度的方向。
具体来说,通过执行多次所述循环步骤,获取多个所述测试距离,若多个所述测试距离中存在两个所述测试距离的数值不相等,则认为所述待测平面21与所述标准平面20不平行。
不仅如此,本具体实施方式还提供了一种平行度检测装置。附图3是本发明具体实施方式中平行度检测装置的结构框图。本具体实施方式提供的平行度检测装置可以采用如图1、图2A-图2F所示平行度检测方法对一待测平面与标准平面之间的平行度进行检测。如图1、图2A-图2F和图3所示,本具体实施方式提供的平行度检测装置,包括:
标准平面20;
支架22,所述支架22的第一端用于固定一待测平面21;
驱动模块23,连接所述支架22的第二端,用于驱动所述支架22旋转;
处理模块30,用于控制所述驱动模块23多次旋转所述支架22,并获取每次旋转后的所述待测平面21上一目标位置211与所述标准平面20之间的测试距离;
判断模块31,用于判断多个所述测试距离是否均相等,若否,则确认所述待测平面21与所述标准平面20不平行。
具体来说,所述驱动模块23可以包括一多轴向机械手臂,所述驱动模块23根据所述处理模块30的控制指令,驱动所述支架22自转,所述支架22的自转带动所述待测平面21的自转,从而实现对多个所述测试距离的获取。所述多轴向机械手臂的精度越高,平行度检测的准确度越高。举例来说,所述多轴向机械手臂的精度至少应为±3mm。通过采用多轴向机械手臂,当检测得到所述待测平面21与所述标准平面20不平行时,还可以根据测得的多个所述测试距离对所述待测平面21的位置进行调整。
可选的,在沿所述标准平面20指向所述待测平面21的方向上,所述待测平面21的投影24完全位于所述标准平面20内。
可选的,所述处理模块30包括:
传感器,用于固定于所述待测平面21上的所述目标位置211。
可选的,所述传感器为激光传感器。
可选的,所述传感器沿垂直于所述待测平面21的方向向所述标准平面20发射检测光线;或者,
所述传感器沿相对于所述待测平面21倾斜一阈值角度的方向向所述标准平面20发射检测光线,所述阈值角度大于90度。
可选的,所述处理模块30还用于在每次控制所述驱动模块23旋转所述支架22之后,统计所述待测平面21已旋转的总的角度值,并判断所述总的角度值是否大于或者等于360度,若是,则结束所述循环步骤。
本具体实施方式提供的平行度检测方法及平行度检测装置,通过多次旋转待测平面,在每次旋转后获取所述待测平面上同一目标位置与所述标准平面之间的测试距离,并通过判断多次获取的测试距离是否相等来检测所述待测平面与所述标准平面是否平行,提高了两个平面之间平行度检测的准确性,避免了人为主观因素对检测结果的影响,而且操作简单,检测效率高。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 平行度检测方法及平行度检测装置
- 冲压模模次计数和平行度检测装置及其平行度检测方法