一种零值绝缘子检测用无人机系统及检测方法
文献发布时间:2023-06-19 12:08:44
技术领域
本发明涉及零值绝缘子检测技术领域,尤其涉及一种零值绝缘子检测用无人机系统及检测方法。
背景技术
作为电力系统的重要组成部分,绝缘子广泛分布于输电线和杆塔的连接处,承担着支撑输电线路以及电气绝缘的作用。在长期的气候环境、温度、湿度等的影响下,加上运行过程中的机械负荷、机电负荷以及冷热变化等,绝缘子串机械性能和绝缘性能将会显著降低,从而产生劣化绝缘子,成为引发闪络、掉串、炸裂和脆断事故的重要隐患。据统计,输变电悬式绝缘子的年劣化率平均为0.3%左右,相当于220kV耐张塔平均每基约有一片零值;随着运行时间的增长,复合绝缘子的劣化问题也愈加突出,我国电网辖区曾发生多起因绝缘子劣化造成的绝缘子闪络和断裂事故。所以,开展有效的劣化绝缘子定期检测,并在事故发生前及时排除缺陷具有重要的意义。
考虑到实际工程运用的可靠性及户外运行环境的复杂性,目前运维人员仍主要采用绝缘电阻法与火花间隙法来检测劣化绝缘子。这两种传统的检测方法均为接触式方法,需停电作业,作业人员携带仪器登杆作业,均存在工作量大、工作性质危险的问题,不能满足当下电网运行单位对数字化智能运维的需求。
发明内容
本发明的目的是提供一种零值绝缘子检测用无人机系统及检测方法,其运用在架空线路日常巡检工作中,可使得输电线路运检人员在不停电的情况下,通过简单的操作便能够开展零值绝缘子检测工作,安全高效,可以有效保障电力系统的安全稳定运行。
本发明为实现上述发明目的采用如下技术方案:
本发明提供了一种零值绝缘子检测用无人机系统,包括:
无人机本体;
空间电场探头,用于探测绝缘子周围空间电场;
吊舱,连接在所述无人机本体上,所述吊舱上设置有传输轴装置,所述传输轴装置的输出端通过伸缩杆与所述空间电场探头相连,通过所述传输轴装置驱动所述伸缩杆水平位移进而调节所述空间电场探头的探测距离;
测距模块和检测主板,设置于所述吊舱上;
手持终端,与所述空间电场探头、检测主板、测距模块和传输轴装置通讯连接。
进一步地,所述无人机本体包括机身、机臂,所述机身顶部安装有RTK模块和GPRS模块,所述机身内部安装有控制主板,所述机臂上安装有无刷电机和螺旋桨,所述螺旋桨固定于所述无刷电机的输出轴上,所述无刷电机通过电子调速器与所述控制主板相连接。
进一步地,所述吊舱通过连接线连接有航插接头,用于所述吊舱与所述控制主板的电气连接。
进一步地,所述吊舱上设置有与所述无人机本体机身连接的云台卡口。
进一步地,所述吊舱上还设置有用于安装所述检测主板的检测主板卡槽。
进一步地,所述吊舱上还设置有用于安装所述测距模块的测距模块卡槽。
进一步地,所述传输轴装置包括内置于所述吊舱内的舵机、主控模块,所述舵机的输出端套接有用于驱动所述伸缩杆平移的滚轮,所述主控模块的控制信号I/O接口与所述舵机相连,所述主控模块与手持终端通讯相连,所述主控模块的供电接口与所述连接线连接。
进一步地,所述检测主板包括放大滤波模块、无线透传模块、单片机模块以及电源逆变模块;
所述空间电场探头探测工频电场强度,将工频电场信号转换为电压信号,通过所述放大滤波模块将信号滤除干扰后,输出至所述单片机模块的ADC端口;
所述测距模块将其与前方障碍物的距离转化为模拟电压信号,输出至所述单片机模块的ADC端口;
所述单片机模块采集ADC端口的电压输入信号、模拟电压信号,再次对电压输入信号滤除干扰后,进行分析处理并零值识别,并将零值识别结果及模拟电压信号输出至所述无线透传模;
所述放大滤波模块、测距模块、无线透传模块和单片机模块由所述无人机本体的控制主板供电,所述控制主板提供低压直流电源,经过所述检测主板中的电源逆变模块,产生不同大小的电压,分别给所述放大滤波模块、测距模块、无线透传模块和单片机模块供电。
进一步地,本发明还提供了一种零值绝缘子检测方法,包括:
操控无人机本体,使其逐步靠近绝缘子串高压端,距绝缘子串中轴设定距离保持悬停;
触发伸缩杆动作信号,伸缩杆匀速伸长;
根据触发时间和伸长速度的乘积计算伸缩杆伸长距离,并与测距模块的距离数据相减,得到空间电场探头与绝缘子串的相对距离;
实时观察该相对距离,待相对距离小于有效检测距离阈值后,触发伸缩杆停止动作,继续保持悬停;
获取无人机本体的RTK模块数据,得到定位点A;
切换无人机视角进行操控无人机本体,使其逐步靠近绝缘子串低压端,距绝缘子串中轴设定距离保持悬停;
触发伸缩杆动作信号,伸缩杆匀速伸长;
根据触发时间和伸长速度的乘积计算伸缩杆伸长距离,并与测距模块的距离数据相减,得到空间电场探头与绝缘子串的相对距离;
实时观察该相对距离,待相对距离小于有效检测距离阈值后,触发伸缩杆停止动作,继续保持悬停;
获取无人机本体的RTK模块数据,得到定位点B;
控制无人机本体由定位点B飞行到定位点A,触发检测主板开始储存空间电场探头形成的ADC 数据;
待无人机本体自动飞行至A点后,触发检测主板停止数据储存,并接收检测主板发送的A、B 两点完整飞行期间检测到的空间电场数据;
根据接收到的数据进行零值绝缘子识别。
进一步地,所述手持终端根据接收到的数据进行零值绝缘子识别的方法包括:
采用三次样条插值法对存储的数据进行插值变换;
将经过插值变换的数据通过分段求平均的方式得到N片绝缘子对应的电场分布特征量;
将N片绝缘子对应的N个电场分布特征量,绘制成曲线,进行零值绝缘子的识别。
本发明的有益效果如下:
本发明运用在架空线路日常巡检工作中,可使得输电线路运检人员在不停电的情况下,通过简单的操作便能够开展零值绝缘子检测工作,安全高效,可以有效保障电力系统的安全稳定运行。
附图说明
图1为根据本发明实施例提供的一种零值绝缘子检测用无人机系统的结构示意图;
图2为根据本发明实施例提供的一种零值绝缘子检测用无人机本体结构图;
图3为图1、图2中吊舱的结构示意图;
图4为图1、图2中检测主板、空间电场探头、测距模块的工作原理图;
图5为根据本发明实施例提供的一种零值绝缘子检测方法的流程图。
具体实施方式
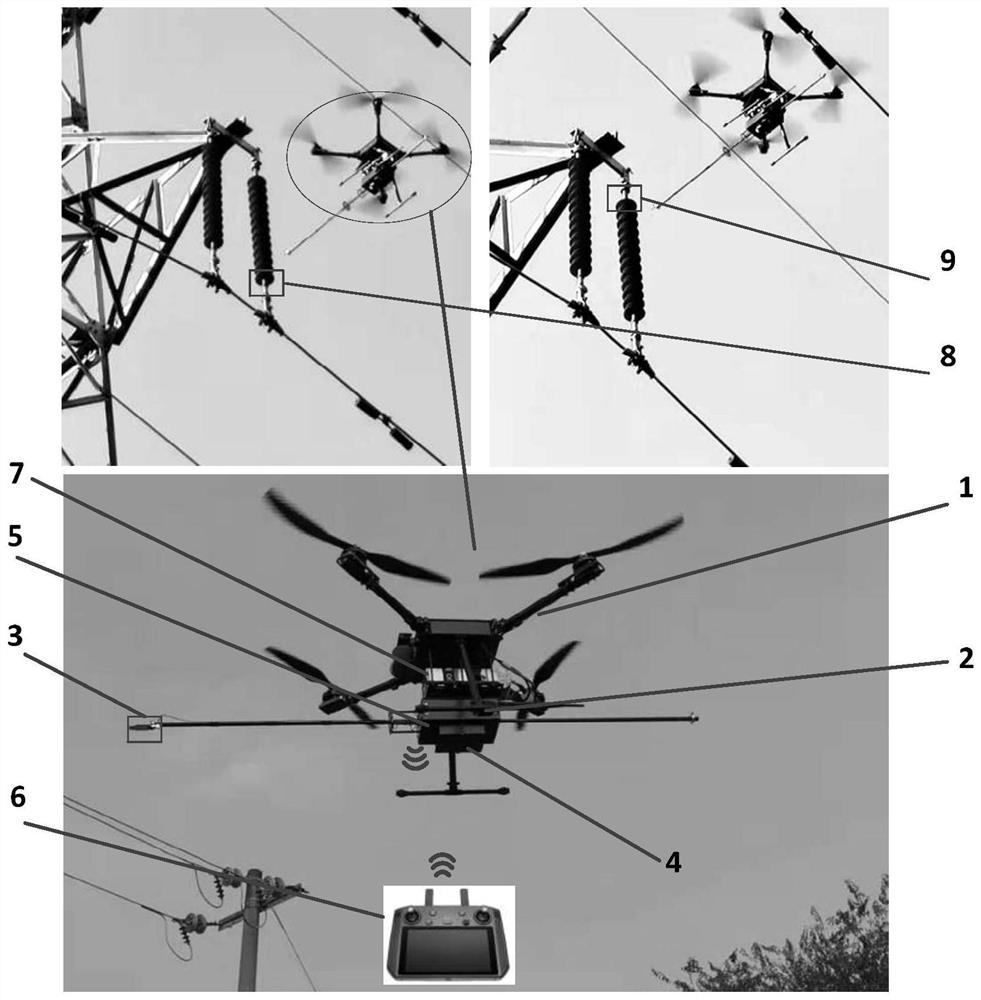
如图1所示,本发明提供的一种零值绝缘子检测用无人机系统,其包括无人机本体1、吊舱2、空间电场探头3、测距模块4、检测主板5、手持终端6、锂电池7;无人机本体用于搭载吊舱,完成飞行检测;吊舱配有伸缩杆和传输轴装置,用于将空间电场探头靠近绝缘子;空间电场探头安装在伸缩杆端部;检测主板安装吊舱内,吊舱与无人机控制主板连有供电接口及伸缩杆控制信号接口;吊舱与无人机本体结构通过云台卡扣连接;手持终端用于控制无人机以及与检测主板通讯;锂电池给无人机本体的控制主板供电。检测时,控制无人机在绝缘子串高压端8和低压端9之间完成一次完整的直线飞行后,检测主板将空间电场探头数据发送给手持终端,手持终端进行算法分析,完成零值绝缘子位置识别。
如图2所示,无人机本体由机身11、无刷电机12、螺旋桨13、RTK模块14、GPRS模块15、控制主板16、电池舱17、云台18组成,云台18用于搭载吊舱2,电池舱17用于搭载锂电池7;无人机本体用于完成整个完成飞行检测;RTK模块14、GPRS模块15安装在机身11顶部,控制主板16安装在机身11内部;为保持荷载飞行的平稳性,建议机身11轴距不小于600mm,无刷电机12和螺旋桨13安装在无人机本体的机臂上,螺旋桨13固定于无刷电机12的输出轴上,无刷电机12通过电子调速器与控制主板16相连接。
如图3所示,吊舱2由连接线21、云台卡口22、检测主板卡槽23、测距模块卡槽24、伸缩杆 25和传输轴装置26组成。连接线21配有航插接头,其一端与控制主板16的电源输出接口相连,另一端连接检测主板5和传输轴装置26的电源输入接口,从而使锂电池7可以给检测主板5和传输轴装置26供电。云台卡口负责与无人机本体机身保持机械连接,保证吊舱的稳定悬挂。检测主板卡槽用于安装和固定检测主板。测距模块卡槽用于安装和固定测距模块。伸缩杆为总长2米左右的圆柱形杆,其安装在传输轴装置的滚轮之间,启动传输轴装置后,伸缩杆可以向两侧平移。
传输轴装置26包括内置于吊舱内的舵机、主控模块,舵机的输出端套接有用于驱动伸缩杆25 平移的滚轮,主控模块的控制信号I/O接口与舵机相连,主控模块与手持终端通讯相连,主控模块的供电接口与连接线21连接。
如图4所示,检测主板5包括放大滤波模块、无线透传模块、单片机模块以及电源逆变模块。所述空间电场探头探测工频电场强度,将工频电场信号转换为毫伏级电压信号,通过放大滤波模块将信号放大、跟随,并滤除干扰后,输出至单片机模块的ADC端口;测距模块可以直接将其与前方障碍物的距离转化为模拟电压信号,输出至单片机模块的ADC端口;单片机模块采集ADC端口的电压输入信号、模拟电压信号,再次对电压输入信号滤除干扰后,进行分析处理并零值识别,并将零值识别结果及模拟电压信号输出至所述无线透传模。所述放大滤波模块、测距模块、无线透传模块和单片机模块由无人机本体的控制主板供电,控制主板提供低压直流电源,经过检测主板中的电源逆变模块,产生不同大小的电压,分别给放大滤波模块、测距模块、无线透传模块和单片机模块供电。
如图5所示,利用本系统的零值绝缘子检测方法及流程为:
1.手持终端与无人机控制主板通讯,利用手持终端切换无人机视角进行无人机操控,使其逐步靠近绝缘子串高压端,距绝缘子串中轴一米左右保持悬停;
2.手持终端与无人机控制主板通讯,利用手持终端触发伸缩杆动作信号,控制主板接收到触发信号后给传动轴模块供电,此时伸缩杆匀速伸长;
3.根据触发时间和伸长速度的乘积,手持终端可自行计算伸缩杆伸长距离,并与测距模块的距离数据相减,得到空间电场探头与绝缘子串的相对距离,实时观察此距离,待数值小于有效检测距离阈值后,触发伸缩杆停止动作,继续保持无人机悬停;
4.手持终端与无人机控制主板通讯,获取此时无人机本体的RTK模块数据,得到定位点A;
5.利用手持终端切换无人机视角进行无人机操控,使其逐步靠近绝缘子串低压端,按照第三步方法实时观察空间电场探头与绝缘子串的相对距离,待数值小于有效检测距离阈值后,保持无人机悬停;
6.手持终端与无人机控制主板通讯,获取此时无人机本体的RTK模块数据,得到定位点B;
7.手持终端与无人机控制主板通讯,控制无人机由定位点B自动飞行到定位点A,同时手持终端触发检测主板开始储存空间电场探头形成的ADC数据;
8.待无人机自动飞行至A点后,手持终端触发检测主板停止数据储存,同时检测主板将A、B两点完整飞行期间检测到的空间电场数据发送给手持终端;
9.手持终端根据接收到的数据进行零值绝缘子识别,检测主板将存储数据清空;
10.手持终端触发一键返航功能,无人机自动返航。
所述手持终端的零值绝缘子识别界面包括端口设置、数据显示、曲线分析。在手持终端第一次使用时,预先进行端口设置,调整通信端口、波特率及数据位数,使其与检测主板的无线透传模块匹配,实现数据的收发;无人机完成绝缘子串高低压端直线飞行后,点击接收数据,此时检测主板收到该信号,将停止数据储存,同时将存储的空间电场数据发送给手持终端;输入绝缘子片数,点击生成曲线,所存储的数据将按照绝缘子串片数均匀分布;点击零值检测,疑似零值绝缘子下面的数据框会出现识别结果,即从低压端开始的第几片为疑似零值绝缘子。
手持终端中的零值绝缘子识别方法为:
1.采用三次样条插值法对存储的数据进行插值变换。设手持终端接收到的电场数据为数组E[n], N为绝缘子片数,n表示接收到数据的个数。将1到N*20均分成n个点,记为x
将i=0、1...n-1带入依次求解可得到样条函数S
2.采用分段求平均的方式得到每片绝缘子对应的电场分布特征量。经过插值处理后,得到数组 E’[n’],为n’个数据分成N组,N为绝缘子片数,求得每组数据的平均值,作为每片绝缘子对应的电场分布特征量,用f
3.经过上述步骤后,得到N个数据点信息,并且在手持终端上绘制成曲线。在不存在零值绝缘子的情况下,该N个数据点应该呈现光滑分布,而存在零值绝缘子时,在对应的电场分布特征量数据点位置出现类似凹陷的畸变特征,即满足下式时中的一条时,则判定为疑似零值绝缘子:
f
f
式中k为比例系数,可取0.2-0.5。
本实施例中,对某220kV线路耐张串的13片绝缘子进行零值绝缘子检测,比例系数k取0.35,通过两次完整的飞行检测,得到最终的识别结果均为第七片出现疑似零值,两次检测结果一致,表明该绝缘子串确实存在零值绝缘子。现场使用时,飞行检测时间一共持续不到8分钟,与人员登塔检测相比,时间缩短三分之二左右,并且大大节省了人力。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
- 一种零值绝缘子检测用无人机系统及检测方法
- 一种用于绝缘子检测机器人的低、零值绝缘子检测方法