一种基于水下摇摆平台的磁异常检测方法
文献发布时间:2023-06-19 12:13:22
技术领域
本发明涉及磁异常探测领域,尤其是一种水下磁异常检测方法。
背景技术
20世纪四五十年代以来,各个国家都极为重视水下磁场的研究和应用,美国、英国、日本和澳大利亚等国都已拥有自己先进的水下磁探测以及磁场防护系统。美国、 俄罗斯、英国和加拿大等国家还设有专门负责从事水下磁场研究的机构。在20世纪 60年代,美国就对海洋中低频磁场进行了研究,并采集了大量长期观测的数据。这有 利于完善海洋磁场统计模型,也为该海域磁探测试验提供了强大的数据支持。近年来, 我国也在积极研究基于磁异常信号的目标探测与定位技术,虽然取得了一定的进展, 但还远落后于西方发达国家。所以提高我国的磁探测设备的性能,为维护我国海洋探 测和安全,有着非常重要的研究意义。在实际情况中,磁探测系统不仅会受到环境磁 噪声的干扰,还会受到探测平台内部器件以及自身运动等影响。这就导致实测磁信号 的信噪比通常较低,所以很难直接从原始信号检测到微弱的磁异常信号。在这样的背 景下,研究磁异常信号的检测算法显得尤为重要。
近年来,国内外学者对磁异常信号检测进行了大量的研究,包括一种高阶交叉过零的磁异常检测算法、基于预测模型的磁传感器网络、一种带通滤波器与基于正交基 函数分解结合的磁异常检测算法及基于小波域正交基函数分解的磁异常检测算法等, 这些算法都有一定的效果和较高的检测率。
国外学者研究表明,典型的波浪周期在10~20s的范围内,波浪频率与磁异常目标的频率相近。理想情况下,由于海下磁场梯度较小,传感器的水下运动不会造成测量 的磁场总量值有较大波动。但由于生产工艺限制和环境磁场等因素影响,三分量磁通 门传感器的三个轴存在零偏误差、非正交误差和灵敏度误差,导致摇摆平台下传感器 的感应能力降低,磁异常信号会被传感器因为摇摆产生的误差信号淹没,而磁通门传感 器的误差参数又会随着环境的变化而变化。如何解进行三轴磁场校准是提高水下实测 磁异常信号检测能力的首要问题。
另一方面,海洋环境水下电磁场一般集中在0.0015~0.5000Hz,,它包含了大地电磁场、海流(潮汐)感应电磁场、人为因素形成电磁场和大部分海面波浪感应电磁场。 同时,地磁场及其与太阳风之间复杂的相互作用会产生低频磁噪声,该磁场变化周期 为0.2~1000s,幅度从0.1nT到几十个nT,是制约目标探测的精度的重要因素。如 何有效的进行磁异常检测、提高水下磁异常检测概率、降低虚警概率,是另一个水下 磁异常检测的关键技术问题。
因此,希望设计一种算法可以有效解决上述两个关键问题,提高磁异常信号的检测效果。
发明内容
为了克服现有技术的不足,本发明提供一种基于水下摇摆平台的磁异常检测方法。
本发明解决其技术问题所采用的技术方案是:
步骤1:将三分量磁通门接收器放在水下;
步骤2:目标沿直线经过接收器,离开大于50m后再沿原路返回,目标往返时经 过接收器的时间分别约为t1和t2;
步骤3:磁信号接收器的采样频率为f,按照
步骤4:选定每帧信号长度为N个数据点,每次更新n个数据点,对采集到的数 据进行校准,具体校准为步骤5-步骤7;
步骤5:参考正交坐标系的三个轴分别为x',y',z',三分量磁通门传感器的三个坐标分别为x,y,z,且参考正交坐标系和三分量磁通门传感器坐标系的原点重合, 参考正交坐标系的z'轴与磁通门传感器坐标系的z轴重合,其中α为x'轴与x轴的夹 角,β为磁通门传感器y轴在平面x'Oy'的投影与y'轴的夹角,γ为y'轴与平面x'Oy'的夹 角,根据数学几何关系,磁通门传感器坐标系与参考正交坐标系的转换关系为:
三分量磁通门传感器的测量值为B=(B
其中
计算磁场的模值平方,与三分量磁通门传感器真实测量值、零偏误差和灵敏度误差的关系为:
|B|
=(a
其中f(E
f(E
令BM=[B
其中K为误差模型参数:
转换矩阵中的a
根据最小二乘原理可得:
其中N为进行一次校准处理的一帧数据的长度;
步骤6:根据
步骤7:根据
步骤8:利用自适应门限能量检测算法对校准后的磁场数据进行检测。
所述f取值范围为5-20hz。
所述N个数据点的N取值范围为500-1024。
所述n取值为5-64。
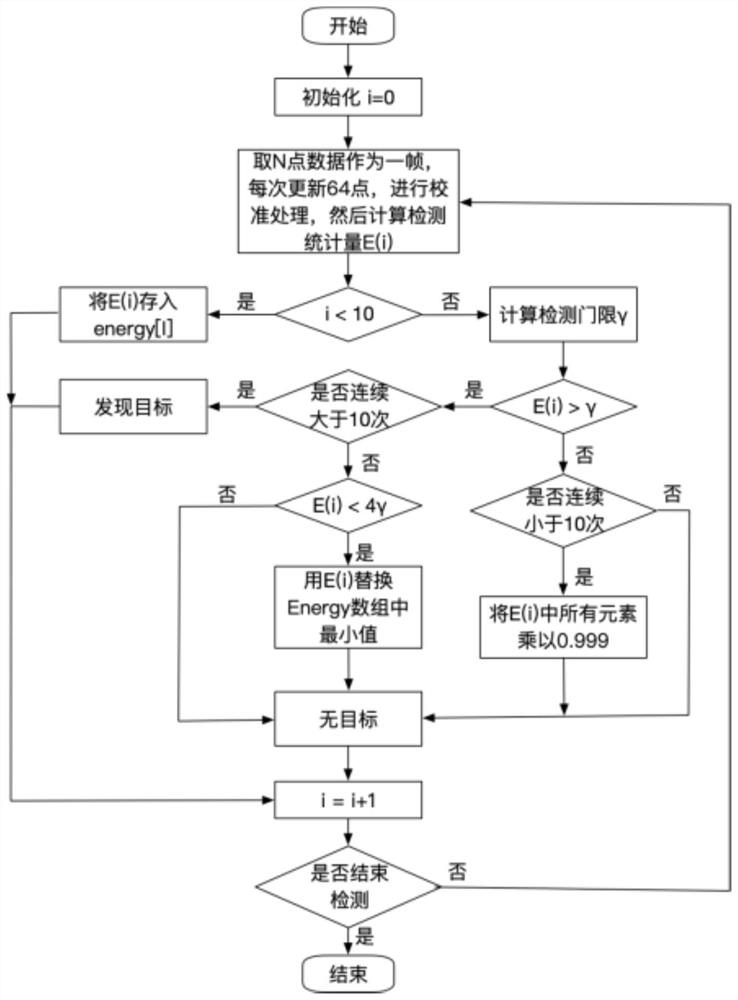
所述自适应门限能量检测算法的步骤如下:
步骤8.1:检测统计量选定为校准后每帧数据的后L个点的能量,记统计量值为
步骤8.2:维护一个长度为10的数组energy[10],存放10帧统计量值E;
步骤8.3:
步骤8.4:当连续10帧数据的检测统计量E大于门限值时,判定为目标出现,当 连续10帧数据的检测统计量E小于等于门限值时,判定为目标消失;
步骤8.5:当判定无目标且Y 所述L取值64。 本发明的有益效果在于通过对传感器三个轴的输出进行校准,使得磁异常信号不会被传感器在水下摇摆而产生的误差信号所淹没;通过采用提出的自适应门限的磁异 常检测算法,解决了海洋环境水下电磁场对检测的干扰问题,提高了对磁异常信号的 检测精度,具有有效性和实时性。 附图说明 图1是本发明的自适应门限的能量检测算法流程图。 图2是本发明的校准前三分量磁通门传感器接收的磁信号模值图。 图3是本发明的校准后三分量磁通门传感器接收的磁信号模值图。 图4是本发明对校准后数据检测过程中的检测量和门限值波形图。 图5是本发明第一次磁异常信号检测结果。 图6是本发明第二次磁异常信号检测结果。 具体实施方式 下面结合附图和实施例对本发明进一步说明。 如图1至图3所示,本发明的方法如下所示: 步骤1:将三分量磁通门接收器放在水下; 步骤2:目标沿直线经过接收器,离开大于50m后再沿原路返回,目标往返时经 过接收器的时间分别约为t1和t2; 步骤3:磁信号接收器的采样频率为f,f取值范围为5-20hz,按照 步骤4:选定每帧信号长度为N个数据点,N取值范围为500-1024,每次更新n 个数据点,n取值为5-64,对采集到的数据进行校准,具体校准为步骤5-步骤7; 步骤5:参考正交坐标系的三个轴分别为x',y',z',三分量磁通门传感器的三个坐标分别为x,y,z,且参考正交坐标系和三分量磁通门传感器坐标系的原点重合, 参考正交坐标系的z'轴与磁通门传感器坐标系的z轴重合,其中α为x'轴与x轴的夹 角,β为磁通门传感器y轴在平面x'Oy'的投影与y'轴的夹角,γ为y'轴与平面x'Oy'的夹 角,根据数学几何关系,磁通门传感器坐标系与参考正交坐标系的转换关系为:
假设三分量磁通门传感器的测量值为B=(B
其中
计算磁场的模值平方,那么它与三分量磁通门传感器真实测量值、零偏误差和灵敏度误差的关系为: |B| =(a 其中f(E f(E 令BM=[B 其中K为误差模型参数:
实际实验环境中,北半球纬度地磁场标量值约为40000nT~60000nT;而f(E 另一方面,由于检测装置在水中的运动可以看作广义平稳随机过程,一段时间内(大于其运动周期)的检测信号是平稳的,故可用一帧信号的均值来代替其真实值计 算,从而解决了磁场真实值模方|B|
其中N为进行一次校准处理的一帧数据的长度; 步骤6:根据 步骤7:根据 步骤8:利用自适应门限能量检测算法对校准后的磁场数据进行检测, 所述自适应门限能量检测算法的步骤如下: 步骤8.1:检测统计量选定为校准后每帧数据的后L个点的能量,L取值64,记 统计量值为 步骤8.2:维护一个长度为10的数组energy[10],存放10帧统计量值E; 步骤8.3: 步骤8.4:当连续10帧数据的检测统计量E大于门限值时,判定为目标出现,当 连续10帧数据的检测统计量E小于等于门限值时,判定为目标消失; 步骤8.5:当判定无目标且Y 图4显示了检测量和门限值的波形图,蓝色曲线和红色曲线分别描绘了检测量和门限的变化情况。 图5和图6为两次磁异常信号检测结果,图中红点表示当前时刻为检测出磁异常目标的时刻,可以看出两次磁异常均被检测到。 本发明针对海洋环境水下电磁场对磁异常检测的干扰问题,提出了自适应门限的磁异常检测算法,提高对磁异常信号的检测精度,本发明能够有效实时检测到磁异常 信号。
- 一种基于水下摇摆平台的磁异常检测方法
- 一种基于前视声纳图像和AUV平台的水下渔网检测方法