一种大型钢结构无损检测装置
文献发布时间:2023-06-19 12:13:22
技术领域
本发明涉及大型钢结构检测设备技术领域,特别涉及一种大型钢结构无损检测装置。
背景技术
目前,以港口起重机、大型游乐设施、锅炉、储罐、钢桥、塔架、风电设备船体等为代表的大型钢结构检测主要通过人工携带检测仪器攀登作业到主要受力部位,利用检测仪器或者目视检查结构表面、连接焊缝处有无明显裂纹和腐蚀,螺栓和销轴连接有无明显缺件和损坏等缺陷,时间成本高,安全风险大,劳动强度大,对人员主观经验要求高,并且有些部位人员往往难以到达,或到达后受空间位置限制,难以从容地使用仪器进行检测工作。因此,人工检测过程中无法携带检测仪器到达的地方或危险性较大的检测场合,迫切需要找到一种高效可靠、易操作、安全性高的方式将检测仪器运送到被测部位进行相应检测。
多旋翼无人机是一种常见的无人飞行器,具有飞行稳定,能够在空中高精度悬停等优点,在桥梁检测、电力巡线等领域得到一定程度的应用,但主要还是限制在拍摄和监控层面,即对目标对象只是“看”和“查”,还不能和目标对象进行“接触”式检测。对于起重机金属结构表面裂纹、腐蚀等缺陷,利用无人机搭载视觉传感器对其进行非接触式检测尚可,但当结构表面存在灰尘、油污、漆皮剥落问题时,会大大降低其检测效果。爬壁检测机器人搭载超声、涡流、磁记忆等无损检测装置,可有效弥补无人机视觉检测的不足,但是其行走速度较慢,作业效率较低,并且起重机某些部位需要跨越较大的距离和角度,例如门座式起重机象鼻梁和主臂架铰接处,爬壁检测机器人如何快速顺利到达这些部位是一个技术难点。
飞行爬壁检测机器人兼具空中运动能力和爬壁行走能力,可以很好地解决这个问题,逐渐成为国内外研究热点。例如专利CN201620406462.8提出一种模块化飞行爬壁检测机器人,包括有飞行模块、吸附模块、爬壁行走模块和控制模块,其中爬壁行走模块和吸附模块设在飞行模块的机架上,飞行模块、吸附模块和爬壁行走模块均由控制模块进行控制工作。专利CN201620406359.3提出一种可变换角度的飞行机器人爬壁行走机构,包括有底盘、支架、行走轮、连接件、减速电机、舵机和电动伸缩杆,舵机驱使连接件转动与电动伸缩杆相配合,从而调节行走轮的高度和角度。CN201911117754.4提出一种多旋翼增压式飞行爬壁检测机器人,包括主体及其上设置的多个旋翼装置,主体的外凸角上连接有爬壁轮,爬壁轮、外凸角一一对应,且爬壁轮与飞行控制器进行电连接。CN201910115767.1提出一种基于矢量飞行的爬壁检测机器人采用涵道电机和矢量推进系统,减少机器人整体重量,使机器人更加轻巧。CN202010312381.2公开了一种可栖息的多旋翼飞行爬壁检测机器人,包括机身、旋翼机构、车轮机构、吸附机构和传动机构,传动机构用于带动螺旋桨倾转,当螺旋桨倾转到与墙壁平行时,可实现机器人的爬壁功能;吸附机构包括吸盘和第三驱动装置,该第三驱动装置驱动吸盘倾转,当吸盘倾转到与墙壁或天花板垂直时,可实现机器人的栖息功能。CN201911120946.0公开了一种可自主上壁的飞行爬壁检测机器人,包括机器人壳体及其上设置的前主旋翼机构、后主旋翼机构、前副旋翼机构与后副旋翼机构,可以实现地面、自主上壁、壁面转换等爬壁行为。
目前,国内外研究主要集中于一体式或可变形式陆空两栖机器人,相对于一体式方案,可分离式或组合式机器人在功能性、实用性、稳定性和可靠性等方面具有明显优势。空中机器人系统(旋翼无人机)与陆地机器人系统(爬壁检测机器人)的可分离式结构一般采用磁力装置、机械手臂抓取机构和黑线引导路径轨迹平台组成,可提供陆地机器人智能回收引导路径、定位信息以及回收装置,可分离式结构复杂,并且需要靠近金属结构表面实现空中机器人和陆地机器人的分离和结合,无人机GPS导航信号易受金属遮挡和电磁干扰,存在一定的安全隐患。
发明内容
本发明提供了一种大型钢结构无损检测装置,其优点是解决视觉检测对于起重机结构表面存在灰尘、油污、漆皮剥落时,其检测效果大大降低的问题,以及爬壁检测机器人行走速度慢、作业效率较低、难以对距离和角度跨越较大部位进行检测的难题,实现人员难以到达部位的远程自动化无损检测。
本发明的上述目的是通过以下技术方案实现的,一种大型钢结构无损检测装置,包括无人飞行器、相机、云台、脐带缆卷放器、脐带缆、爬壁检测机器人和地面控制装置,相机通过云台设置在无人飞行器的底部,脐带缆卷放器设置在无人飞行器的底部,脐带缆一端与脐带缆卷放器相连,另一端与爬壁检测机器人连接;
所述无人飞行器上设置有第一控制器和第一无线通信模块,第一控制器和第一无线通信模块之间电连接,云台和相机均与第一控制器电连接;
所述脐带缆卷放器包括电机、卷筒和底座,底座固定在无人飞行器上,卷筒设置在底座上,电机与卷筒连接,电机与第一控制器电连接;所述脐带缆一端缠绕在卷筒上;
所述爬壁检测机器人上搭载无损检测装置,所述爬臂检测机器人上设有第二控制器和第二无线通信模块,第二控制器和第二无线通信模块之间电连接,爬臂检测机器人的驱动装置与第二控制器电连接,无损检测装置与第二控制器电连接。
本发明进一步设置为,所述无损检测装置为微型高清摄像机、涡流探伤仪、超声波探伤仪、超声波测厚仪以及金属磁记忆检测仪中的一种或多种。
本发明进一步设置为,爬臂机器人上还搭载有表面打磨模块,所述表面打磨模块与第二控制器电连接。
本发明进一步设置为,还包括一个地面控制装置,所述地面控制装置内设有第三控制器、第三无线通信模块、存储器、显示器和遥控终端,所述第三无线通信模块、存储器、显示器和遥控终端均与第三控制器电连接,所述第三无线通信模块用于与第一无线通信模块和第三无线通信模块通信。
本发明进一步设置为,所述无人飞行器为无人机或无人飞艇。
与现有技术相比,本发明的有益效果是:
本发明采用脐带缆的组合式陆空两栖机器人方案,在结构表面安全距离外实现无人飞行器和爬壁检测机器人的分离和结合,通过脐带缆防止爬壁检测机器人意外坠落,同时无人飞行器和爬壁检测机器人分别进行信号传输和控制,系统抗干扰性强,工作稳定性、可靠性和安全性高。
将无人飞行器与可见光相机及爬壁检测机器人结合,集成的大型钢结构结构无损检测系统,解决了人员不可达部位的检测难题。将无人飞行器视觉检测与爬壁检测机器人无损检测方法进行结合,不仅可以降低结构表面灰尘、油污、漆皮剥落对视觉检测的干扰,还可以解决爬壁检测机器人行走速度慢、作业效率较低、距离和角度跨越较大部位的检测难题,实现结构表面和内部裂纹、疏松、气孔、夹杂等缺陷的远程自动化检测和结构测厚功能,有效弥补视觉检测的不足。无人飞行器采用无人机和无人飞艇两个方案,无人飞艇检测系统可以克服无人机搭载重量较大的载荷时出现的续航时间短、飞行稳定性和安全性差等问题,具有载重量大、长航时、低速机动、价格低廉、环保和能耗低、操作方便和安全可靠等优势,可以进一步提高检测效率、质量和安全性,完成以往传统人工方式难以完成的检测任务,有效地降低事故隐患,减少了人力成本和安全风险,提高了大型结构检测的智能化、数字化和自动化水平,满足行业发展的迫切需求。
附图说明
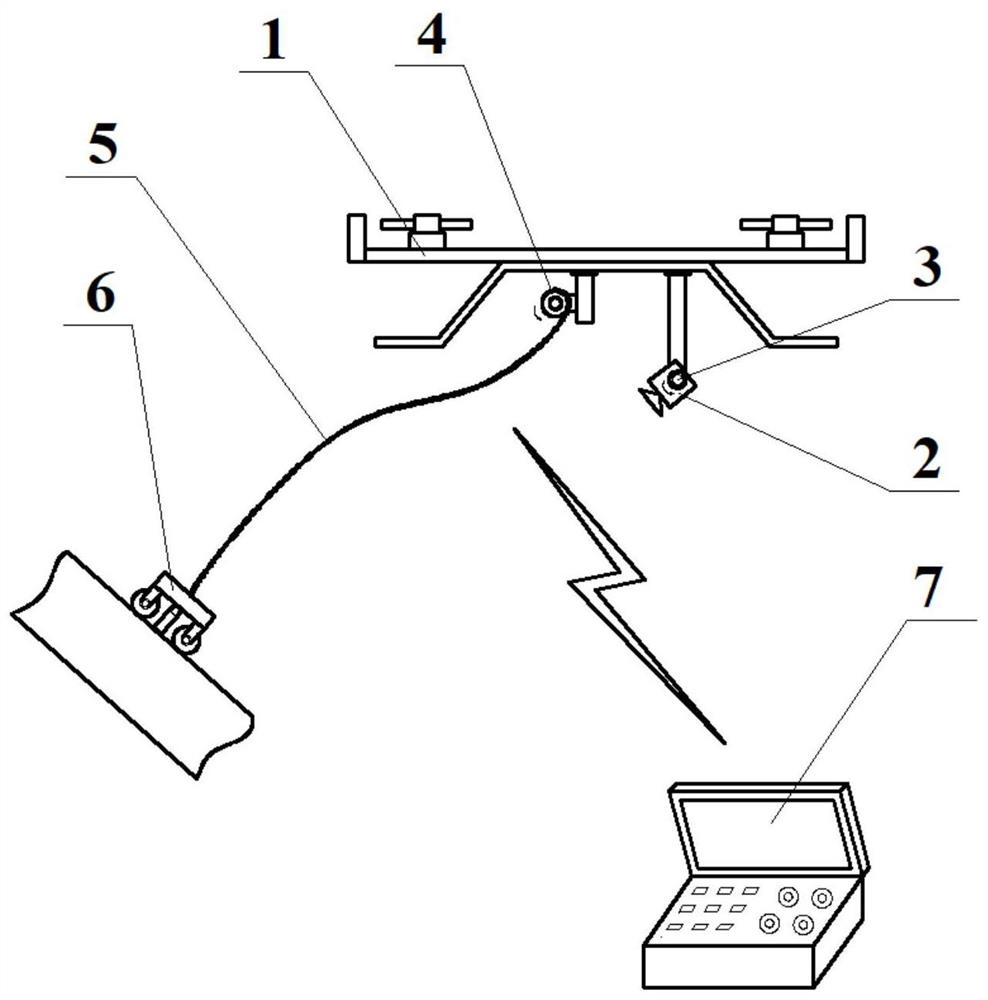
图1是本发明实施例的整体结构示意图,其中无人飞行器为无人机;
图2是本发明实施例的整体结构示意图,其中无人飞行器为无人飞艇;
图3是本发明实施例的结构框图。
图中,1、无人飞行器;2、相机;3、云台;4、脐带缆卷放器;5、脐带缆;6、爬壁检测机器人;7、地面控制装置。
具体实施方式
下面结合附图详细说明本发明的具体实施方式。
实施例:参考图1-2,一种大型钢结构无损检测装置,包括无人飞行器1、相机2、云台3、脐带缆卷放器4、脐带缆5、爬壁检测机器人6和地面控制装置7,相机2通过云台3设置在无人飞行器1的底部,脐带缆卷放器4设置在无人飞行器1的底部,脐带缆5一端与脐带缆卷放器4相连,另一端与爬壁检测机器人6连接;
所述无人飞行器1上设置有第一控制器和第一无线通信模块,第一控制器和第一无线通信模块之间电连接,云台3和相机2均与第一控制器电连接;
所述脐带缆卷放器4包括电机、卷筒和底座,底座固定在无人飞行器1上,卷筒设置在底座上,电机与卷筒连接,电机与第一控制器电连接;所述脐带缆5一端缠绕在卷筒上;
所述爬壁检测机器人6上搭载无损检测装置,所述爬臂检测机器人上设有第二控制器和第二无线通信模块,第二控制器和第二无线通信模块之间电连接,爬臂检测机器人的驱动装置与第二控制器电连接,无损检测装置与第二控制器电连接。
所述无损检测装置为微型高清摄像机、涡流探伤仪、超声波探伤仪、超声波测厚仪以及金属磁记忆检测仪中的一种或多种,爬臂机器人上还搭载有表面打磨模块,实现结构表面裂纹、腐蚀、破损检测,实现打磨和测厚功能,实现内部裂纹、疏松、气孔、夹杂等缺陷检测。所述表面打磨模块与第二控制器电连接。表面打磨模块包括打磨电机、打磨头和压力调节装置,压力调节装置内的弹簧压缩产生压力,压力大小通过传感器测出,达到预期压力后,用机械结构锁住弹簧变形,打磨电机开启,带动打磨头旋转,配合机器人的进给运动,对待检测结构表面进行打磨,去除表面油漆、铁锈、氧化皮或其它杂质,使之露出金属光泽,以便进行后续检测。本实施例中的表面打磨模块具体结构参考专利公开号为CN104625913A的中国发明专利申请《一种卧式储罐罐体及罐车罐体的环焊缝打磨机器人》,在此不做赘述。
还包括一个地面控制装置7,所述地面控制装置7内设有第三控制器、第三无线通信模块、存储器、显示器和遥控终端,所述第三无线通信模块、存储器、显示器和遥控终端均与第三控制器电连接,所述第三无线通信模块用于与第一无线通信模块和第二无线通信模块通信,显示器用于显示相机2所采集到的信息,存储器用储存无损检测装置采集的信息。遥控终端上包括无人飞行器1遥控操纵按钮、云台遥控操纵按钮、爬壁检测机器人6遥控操纵按钮、脐带缆卷放器4遥控操纵按钮,同时包括相机2以及无损检测装置的远程启闭按钮。遥控终端的遥控指令通过第三通信模块传输至无人飞行器1上和爬壁检测机器人6上。
相机2图像数据通过第一无线通信模块发送到地面处理装置进行显示、存储和分析,同时接收地面飞控指令进行起飞、悬停、降落等飞行功能,有效传输距离不小于1000m;爬壁检测机器人6检测数据通过第二无线通信模块发送到地面处理装置进行显示、存储和分析,同时接收地面控制指令进行检测、打磨等动作,并实现爬臂检测机器人相关运动功能,有效传输距离不小于200m。
所述相机2为可见光相机2,云台3为两轴或三轴云台;云台3可配置在无人飞行器1的上方,也可以配置在下方,带动相机2转动,对准大型起重机待测部位进行多方位拍摄,其垂直运动方向的俯仰角范围达到±90°,水平方向方位运动范围达到±180°,既能向下俯视成像,又能向上仰视成像,能够对大型起重机各种关键部位进行多方位拍摄无视场死角,相机2旋转平台基座装设阻尼弹簧减振装置,具有降低无人飞行器1振动,减小其引起的图像抖动干扰,实现画面稳定功能。所述相机2为可见光相机2,采集待检测部位的高分辨率可见光图像,相机2向下俯视拍摄时,可以通过调节镜头焦距使相机2视场角减小,从而避开旋翼对图像视场的干扰。可以控制相机2进行变焦,以调节图像放大倍率的大小,既可以对起重机整体结构进行全局概略观察,又可以对局部重点检测部位进行放大和细节观察。
所述无人飞行器1为无人机或无人飞艇。
本实施例中的大型钢结构无损检测装置的使用方法为:
步骤一、对飞行爬壁检测机器人6检测装置进行检查,确认能够正常工作。
步骤二、通过地面处理装置的无人飞行器1遥控操纵按钮遥控无人飞行器1起飞,飞至起重机待检测部位附近后悬停状态,使相机2的镜头对准起重机的待检测部位进行拍摄,通过云台遥控操纵按钮调节云台对待检测部位进行拍摄,将拍摄的图像传给第一控制器,然后通过第一无线通信模块、第三无线通信模块进行无线通信将图像传送给地面处理装置进行显示,地面操控人员通过观察初步判定是否存在明显的缺陷,如金属结构表面、连接焊缝处有无明显的裂纹和锈蚀、螺栓和销轴连接有无明显缺件和损坏,确定下一步进行重点检测的疑似缺陷部位。
步骤三、无人飞行器1带着爬壁检测机器人6快速飞至待检测部位上空并悬停,在无人飞行器1安全距离之外,通过脐带缆卷放器4遥控操纵按钮控制卷筒转动及脐带缆收放,投放爬壁检测机器人6到结构表面,由爬壁检测机器人6对有疑似缺陷的重点部位进行无损检测。在爬壁检测机器人6的投放、着陆和检测过程中,由无人飞行器1搭载相机2对其进行拍摄,根据机器人与待检测部位的图像,判断其与待检测表面的空间位置关系,通过爬壁检测机器人6遥控操纵按钮完成壁面行走、检测、打磨等动作,同时控制脐带缆卷放器4使脐带缆的卷放与机器人动作相匹配,将机器人检测数据通过第二无线通信模块、第三无线通信模块传送给地面处理装置进行显示、存储和分析,实现金属结构表面及内部缺陷的自动检测和识别。
步骤四、检测结束后,通过地面控制装置7的脐带缆卷放器4遥控操纵按钮控制卷筒转动及脐带缆收缩,将爬壁检测机器人6回收到无人飞行器1下方;通过地面处理装置的无人飞行器1遥控操纵按钮遥控无人飞行器1降落。
以上所述的仅是本发明的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
- 一种大型钢结构无损检测装置
- 一种桥梁桩基无损检测装置及无损检测方法