一种智慧沙盘交通展示系统及控制方法
文献发布时间:2023-06-19 12:19:35
技术领域
本申请涉及智慧沙盘展示技术领域,尤其是涉及一种智慧沙盘交通展示系统及控制方法。
背景技术
目前,智慧沙盘在传统景观沙盘上配备了智能化主控、传感器、机器人等自控智能数字化设备,将静态景观沙盘发展成拥有信息输入、交互、处理能力的智能沙盘,大大提升沙盘的展示能力,拓展了沙盘的应用范围。
交通控制系统是沙盘上自动交通系统的主控部分,主要实现信号灯控制和车辆行驶控制等内容。初期的智慧沙盘交通控制系统能够对车辆的行驶进行控制,但无法进行交通信号灯和路口环境的判别以及相关的控制操作;目前,有的智慧沙盘交通控制系统通过车辆搭载摄像头,采集环境数据,对道路上的标志物体进行识别,根据识别结果来对道路环境进行判断,但由于车辆的处理能力不足,需要有专门的计算机对摄像头的图像进行识别,将识别结果形成判定结果传给车辆,车辆再根据指令进行操作。由于车辆行驶无法脱离上位计算机的数据处理和控制,大大增加了方案的复杂度,对于智慧沙盘的使用带来很大不便;并且实时图像处理需要占据大量带宽,车辆行驶控制对时间的要求非常严苛,一秒的误差就会导致完全不同的结果,因此对车辆的通讯模块性能以及上位计算机的图形运算能力要求很高,设备能耗和成本高;因此,本发明人认为现有的智慧沙盘交通控制方式上还存在进一步的改进空间。
发明内容
为了克服现有技术的缺陷,本申请提供一种智慧沙盘交通展示系统及控制方法,能够充分利用有限带宽,高效通讯,并且便于车辆主控模块利用有限的算力即可做出交通判断,做出合规行驶动作。
第一方面,本申请提供一种智慧沙盘交通展示系统,所述系统包括车辆、道路位置传感器、交通信号灯及交通主控模块;所述车辆包括车辆主控模块;所述道路位置传感器、交通信号灯、车辆主控模块分别与交通主控模块通信连接;所述道路位置传感器安装于智慧沙盘的预设道路位置,所述预设道路位置包括红绿灯路口和非红绿灯路口路段;
所述道路位置传感器,用于感知车辆是否经过预设道路位置,并生成位置感知信号以发送给所述交通主控模块;
所述交通信号灯,用于生成红绿灯状态信号并发送给所述交通主控模块;
所述交通主控模块,用于将所述位置感知信号和红绿灯状态信号分别根据预设的交通编码库进行编码,得到位置编码信息和红绿灯编码信息并发送给车辆主控模块;
所述车辆主控模块,用于接收并根据位置编码信息和红绿灯编码信息,判断车辆是否执行红绿灯交通规则。
可选的,所述系统还包括安装于车辆的左侧红外收发装置和右侧红外收发装置,以及布设于若干红绿灯路口的红外吸光材料;
所述左侧红外收发装置,用于实时发射红外光,当左侧发射的红外光被预设红绿灯路口的红外吸光材料吸收时,则所述左侧红外收发装置还用于生成右转触发信号并发送给车辆主控模块,以使车辆主控模块控制调整车辆的右轮速度;
所述右侧红外收发装置,用于实时发射红外光,当右侧发射的红外光被预设红绿灯路口的红外吸光材料吸收时,则所述右侧红外收发装置还用于生成左转触发信号并发送给车辆主控模块,以使车辆主控模块控制调整车辆的左轮速度。
可选的,所述车辆还包括电机组,所述电机组包括左侧电机和右侧电机;所述电机组用于根据所述车辆主控模块输出的PWM信号驱动车辆差速转弯、直行或原地旋转。
可选的,所述交通主控模块和车辆主控模块均采用单片机,支持UART传输和编码通讯。
可选的,所述车辆还包括通讯模块,用于车辆主控模块与交通主控模块之间的通信;所述通讯模块采用蓝牙、2.4GHZ无线、Wi-Fi、LoRa或Zig-Bee通信。
第二方面,本申请提供一种智慧沙盘交通展示系统的控制方法,所述方法包括:
实时获取道路位置传感器的位置感知信号,所述位置感知信号包括车辆经过当前道路位置时道路位置传感器的触发信号;
获取所述当前道路位置最近交通信号灯的红绿灯状态信号;
根据预设的交通编码库,将所述位置感知信号和红绿灯状态信号分别进行编码,得到位置编码信息和红绿灯编码信息并发送给车辆主控模块,以使车辆主控模块根据位置编码信息和红绿灯编码信息,判断车辆是否位于红绿灯路口以及是否执行红绿灯交通规则。
可选的,所述根据预设的交通编码库,将所述位置感知信号和红绿灯状态信号分别进行编码,得到位置编码信息和红绿灯编码信息,包括:
所述交通编码库包括位置编码库和红绿灯信号编码库,所述位置编码库包括第一编码号和第二编码号,所述第一编码号表示车辆在红绿灯路口,所述第二编码号表示车辆不在红绿灯路口;所述红绿灯信号编码库包括第三编码号和第四编码号,所述第三编码号表示红灯启动;第四编码号表示绿灯启动;
基于预设的传感器布设记录表,若车辆当前经过的道路位置传感器布设在红绿灯路口,则将位置感知信号编码为第一编码号;若车辆当前经过的道路位置传感器未布设在红绿灯路口,则将位置感知信号编码为第二编码号;将所述位置感知信号编码后得到的编码号作为所述位置编码信息;
若所述红绿灯状态信号为红灯启动信号,则将所述红绿灯状态信号编码为第三编码号;若所述红绿灯状态信号为绿灯启动信号,则将所述红绿灯状态信号编码为第四编码号;将所述红绿灯状态信号编码后得到的编码号作为所述红绿灯编码信息。
可选的,所述实时获取道路位置传感器的位置感知信号之后,所述方法还包括:
根据时间序列的所述位置感知信号,刻画得到车辆的路径。
第三方面,本申请提供的一种智慧沙盘交通展示系统的控制方法,所述方法包括:
获取位置编码信息和红绿灯编码信息;
基于预设的交通编码库分别对所述位置编码信息和红绿灯编码信息进行解码,获取解码结果;
若所述解码结果为车辆在红绿灯路口,且红灯开启,则生成车辆停止行驶指令并调制成PWM信号以输出至电机组;
若所述解码结果为车辆在红绿灯路口,且绿灯开启,则生成车辆放行指令并调制成PWM信号以输出至电机组;
若所述解码结果为车辆不在红绿灯路口,红灯开启或绿灯开启,则生成车辆放行指令并调制成PWM信号以输出至电机组。
可选的,所述方法还包括:
若获取到左转触发信号,则生成左轮速度增大指令并调制成PWM信号以输出至电机组,使电机组差速驱动车辆左转;
若获取到右转触发信号,则生成右轮速度增大指令并调制成PWM信号以输出至电机组,使电机组差速驱动车辆右转。
本申请包括以下有益技术效果:
通过在沙盘道路上布设道路位置传感器,便于对车辆的位置进行感知,快速获得位置感知信号;获取红绿灯状态信号,并使用信号编码的方式将位置感知信号和红绿灯状态信号进行编码,得到位置编码信息和红绿灯编码信息,从而能够充分利用有限带宽,高效通讯,将位置编码信息和红绿灯编码信息汇集到车辆主控模块,车辆主控模块利用有限的算力即可做出交通判断,做出合规行驶动作。
附图说明
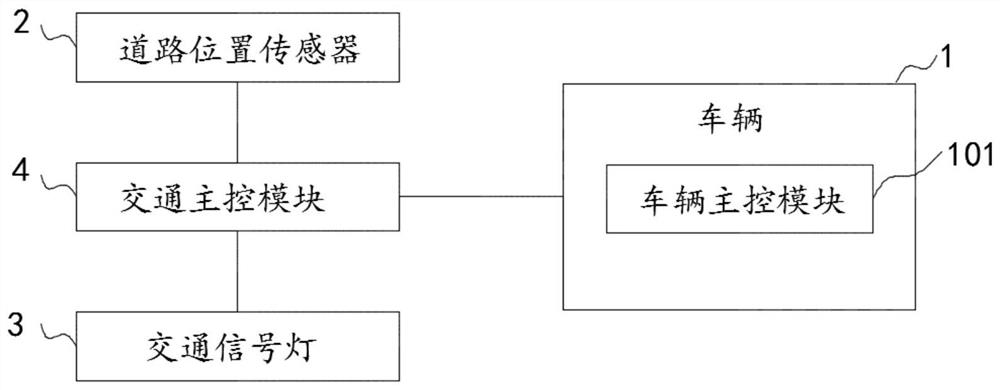
图1是本发明提供的智慧沙盘交通展示系统一种实施例的原理框图;
图2是本发明提供的智慧沙盘交通展示系统的控制方法一种实施例的方法流程图;
图3是本发明提供的智慧沙盘交通展示系统的控制方法另一种实施例的方法流程图;
图4是本发明提供的时间序列的编码信息解码示意图。
具体实施方式
以下结合附图1-4对本申请作进一步详细说明。
本申请实施例公开一种智慧沙盘交通展示系统,参照图1,该系统包括车辆、道路位置传感器、交通信号灯及交通主控模块;车辆包括车辆主控模块;道路位置传感器、交通信号灯、车辆主控模块分别与交通主控模块通信连接;道路位置传感器安装于智慧沙盘的预设道路位置,预设道路位置包括红绿灯路口和非红绿灯路口路段。
道路位置传感器,用于感知车辆是否经过预设道路位置,并生成位置感知信号以发送给交通主控模块;交通信号灯,用于生成红绿灯状态信号并发送给交通主控模块;交通主控模块,用于将位置感知信号和红绿灯状态信号分别根据预设的交通编码库进行编码,得到位置编码信息和红绿灯编码信息并发送给车辆主控模块;车辆主控模块,用于接收并根据位置编码信息和红绿灯编码信息,判断车辆是否执行红绿灯交通规则。
需要说明的是,车辆为沙盘上进行交通展示的玩具车或智能小车;该车辆还包括直流电机组和运动构件,其中电机组包括左侧电机和右侧电机;运动构件即为车辆的轮组;通过车辆主控模块输出PWM信号控制直流电机,PWM脉冲强度决定电机的旋转速度,可以给予负值进行反转;左右两侧的电机独立控制,就可以进行差速转弯,原地旋转或直行。
在本实施例中,交通主控模块和车辆主控模块均采用具有CPU和可编程能力的单片机,并支持UART传输(异步收发传输),并可以进行编码通讯。
在本实施例中,车辆还包括通讯模块,用于车辆主控模块与交通主控模块之间的通信。在本实施例中,该通讯模块采用蓝牙作为底层通讯方式,由于使用自编码,所以直接采用UART传输方式;在其他实施例中,也可以采用2.4GHZ无线、Wi-Fi、LoRa或Zig-Bee通信。需要说明的是,由于沙盘中车辆主控模块和交通主控模块之间的最大传输比特率为9600bps,用8位传输,字节传输速率为1200byte/s,即1.2KB/s,因此带宽有限;在本实施例中,采用信息编码的方式,使交通主控模块给车辆主控模块发送信号自带编码信息标记,车辆主控模块无需和交通主控模块进行通讯握手,即能够迅速建立连接,充分利用有限带宽,实现高效通讯。
在本实施例中,智慧沙盘交通展示系统还包括安装于车辆的左侧红外收发装置和右侧红外收发装置,以及布设于若干红绿灯路口的红外吸光材料。该左侧红外收发装置用于实时发射红外光;当左侧发射的红外光被预设红绿灯路口的红外吸光材料吸收时,则左侧红外收发装置还用于生成右转触发信号并发送给车辆主控模块,以使车辆主控模块控制调整车辆的右轮速度;右侧红外收发装置用于实时发射红外光;当右侧发射的红外光被预设红绿灯路口的红外吸光材料吸收时,则右侧红外收发装置还用于生成左转触发信号并发送给车辆主控模块,以使车辆主控模块控制调整车辆的左轮速度。需要说明的是,右转触发信号是指左侧收发装置在未检测到反射光时的触发信号;左转触发信号是指右侧收发装置在未检测到反射光时的触发信号。
具体地,车辆左右侧各设置一个红外收发装置,两侧不断发射红外光,如果有反射光被探测,红外收发装置不产生信号输出,车辆直行;当车辆处于布设有红外吸光材料的红外灯路口时,红外收发装置未检测到反射光,就产生信号输出。在本实施例中,根据车辆的预设行驶路线,可以将红外吸光材料布设在需要转弯的道路中间,当车辆左侧红外收发装置产生信号时,车辆应朝右偏移,控制右轮速度大于左轮,直至无信号输出;当车辆右侧红外收发装置产生信号时,车辆应朝左偏移,控制左轮速度大于右轮,直至无信号输出;需要说明的是,当左右两侧同时产生信号时,可以采取停车动作。通过车辆搭载红外收发装置,可以使车辆自动转弯或纠偏,提高沙盘演示的智能性。
在本实施例中,当车辆经过道路位置传感器时,道路位置传感器产生与无车辆经过时不同的信号即位置感知信号,该位置感知信号经IO口传输到交通主控模块,交通主控模块根据道路位置传感器的预先编码,对位置感知信号进行编码得到位置编码信息,并通过通讯模块将位置编码信息立刻发送给车辆主控模块。需要说明的是,在沙盘的道路红绿灯路口和非红绿灯路口路段都有布设道路位置传感器;车辆在沙盘上行驶时,随着时间的推移,不断的经过布设有道路位置传感器的路段时,都会有相应的位置编码信息传送车辆主控模块,传送时间延迟在一秒以内,对车辆的行驶没有影响。此外,根据时间序列的位置感知信号,交通主控模块可以对车辆的行驶路径进行刻画,生成车辆行驶轨迹。
在本实施例中,交通信号灯由IO口连接到交通主控模块进行控制,交通主控模块通过IO口输出数字信号,控制交通信号灯的显示和开启。需要说明的是,交通主控模块模拟多任务编程,能执行精确的时间任务,定时对交通信号灯进行控制,以使显示和切换信号灯。在红绿灯启动时,红绿灯状态信号经交通主控模块编码,通过通讯模块将红绿灯编码信息发送给车辆主控模块,车辆结合最新的位置编码信息来决定是否需要遵守交通规则,需要说明的是,该交通规则即为常规的红灯停、绿灯行。
本实施例通过在沙盘道路上布设道路位置传感器,便于对车辆的位置进行感知,快速获得位置感知信号;获取红绿灯状态信号,并使用信号编码的方式将位置感知信号和红绿灯状态信号进行编码,得到位置编码信息和红绿灯编码信息,从而能够充分利用有限带宽,高效通讯,将位置编码信息和红绿灯编码信息汇集到车辆主控模块,车辆主控模块利用有限的算力即可做出交通判断,做出合规行驶动作。
参照图2,本实施例还提供一种智慧沙盘交通展示系统的控制方法,该控制方法为交通主控模块单侧端执行,该控制方法包括下述步骤:
S11:实时获取道路位置传感器的位置感知信号,位置感知信号包括车辆经过当前道路位置时道路位置传感器的触发信号。
S12:获取当前道路位置最近交通信号灯的红绿灯状态信号。
S13:根据预设的交通编码库,将位置感知信号和红绿灯状态信号分别进行编码,得到位置编码信息和红绿灯编码信息并发送给车辆主控模块,以使车辆主控模块根据位置编码信息和红绿灯编码信息,判断车辆是否位于红绿灯路口以及是否执行红绿灯交通规则。
需要说明的是,由于在沙盘的红绿灯路口和非红绿灯路口路段安装了道路位置传感器,当车辆经过道路位置传感器时,沿途的道路位置传感器产生与无车辆经过时不同的信号即位置感知信号,实时获取道路位置传感器的位置感知信号,即可实时反映车辆当前经过的道路位置信息,从而便于确定车辆的当前道路位置是否位于红绿灯路口;获取当前道路位置最近交通信号灯的红绿灯状态信号,根据车辆当前经过的道路位置信息以及当前道路位置最近交通信号灯的红绿灯状态信号,有助于确定车辆是否执行红绿灯交通规则。
在本实施例中,步骤S1即获取道路位置传感器的位置感知信号之后,本实施例的控制方法还包括:根据时间序列的位置感知信号,刻画得到车辆的路径。
需要说明的是,沙盘道路沿途布设了道路位置传感器,车辆每经过一个道路位置传感器,则触发该道路位置传感器生成位置感知信号,从而在车辆经过沿途道路时,生成时间序列的位置感知信号,根据每个位置感知信号对应的道路位置传感器的具体位置,可以刻画出车辆的运动轨迹即车辆的路径。
在本实施例中,步骤S3中即根据预设的交通编码库,将位置感知信号和红绿灯状态信号分别进行编码,得到位置编码信息和红绿灯编码信息,包括下述步骤:
交通编码库包括位置编码库和红绿灯信号编码库,位置编码库包括第一编码号和第二编码号,第一编码号表示车辆在红绿灯路口,第二编码号表示车辆不在红绿灯路口;红绿灯信号编码库包括第三编码号和第四编码号,第三编码号表示红灯启动;第四编码号表示绿灯启动。
基于预设的传感器布设记录表,若车辆当前经过的道路位置传感器布设在红绿灯路口,则将位置感知信号编码为第一编码号;若车辆当前经过的道路位置传感器未布设在红绿灯路口,则将位置感知信号编码为第二编码号;将位置感知信号编码后得到的编码号作为位置编码信息。
若红绿灯状态信号为红灯启动信号,则将红绿灯状态信号编码为第三编码号;若红绿灯状态信号为绿灯启动信号,则将红绿灯状态信号编码为第四编码号;将红绿灯状态信号编码后得到的编码号作为红绿灯编码信息。
需要说明的是,在沙盘上布设每个道路位置传感器时都会记录具体的位置信息,形成传感器布设记录表并存储在位置数据库中;在一实施例中,在该传感器布设记录表中预先将每个道路位置传感器的位置进行编码,得到对应的编码号。
在一个具体应用实例中,交通编码库采用四位字符编码号,如表1所示信息编码方法表,其中,0是红绿灯信息;1是位置信息。位置编码库包括1NOH和1HLD两种编号,其中1NOH表示车辆当前经过的道路位置传感器不在红绿灯处,1HLD表示车辆当前经过的道路位置传感器在红绿灯路口,如表2所示位置编码方法表;红绿灯信号编码库包括0GRE和0RED两种编号,其中0GRE表示车辆当前道路位置最近的绿灯为开启状态,0RED表示车辆当前道路位置最近的红灯为开启状态,如表3所示红绿灯编码方法表。
表1信息编码方法表
表2位置编码方法表
表3红绿灯编码方法表
本实施例中,在交通主控模块和车辆主控模块之间采用信息编码通信,可以充分利用有限带宽,高效通讯,并减小了车辆主控模块的算力需求,相对地数据处理效率更高,传输延迟低,车辆交通运行更稳定。
应理解,上述实施例中各步骤的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本发明实施例的实施过程构成任何限定。
参照图3,本实施例还提供一种智慧沙盘交通展示系统的控制方法,该控制方法为车辆控制模块单侧端执行,该控制方法包括下述步骤:
S21:获取位置编码信息和红绿灯编码信息。
S22:基于预设交通编码库分别对位置编码信息和红绿灯编码信息进行解码,获取解码结果。
S23:若解码结果为车辆在红绿灯路口,且红灯开启,则生成车辆停止行驶指令并调制成PWM信号以输出至电机组。
S24:若解码结果为车辆在红绿灯路口,且绿灯开启,则生成车辆放行指令并调制成PWM信号以输出至电机组。
S25:若解码结果为车辆不在红绿灯路口,红灯开启或绿灯开启,则生成车辆放行指令并调制成PWM信号以输出至电机组。
需要说明的是,车辆主控模块接收交通主控模块发送的位置编码信息和红绿灯编码信息,根据交通编码库,可以将位置编码信息和红绿灯编码信息进行解码,获取解码结果。
在一个具体的应用实例中,参照图4,当某时刻,红绿灯编码信息为0GRE,位置编码信息为1HLD,则判定车辆在红绿灯路口,且绿灯开启,车辆执行放行指令;当某时刻,红绿灯编码信息为0RED,位置编码信息为1HLD,则判定车辆在红绿灯路口,且红灯开启,车辆执行停止指令。
在一实施例中,智慧沙盘交通展示系统的控制方法还包括:
若获取到左转触发信号,则生成左轮速度增大指令并调制成PWM信号以输出至电机组,使电机组差速驱动车辆左转。若获取到右转触发信号,则生成右轮速度增大指令并调制成PWM信号以输出至电机组,使电机组差速驱动车辆右转。
需要说明的是,当车辆右侧红外收发装置产生信号时,车辆应朝左偏移,控制左轮速度大于右轮,直至无信号输出;当车辆左侧红外收发装置产生信号时,车辆应朝右偏移,控制右轮速度大于左轮,直至无信号输出。需要说明的是,当左右两侧同时产生信号时,可以采取停车动作。通过车辆搭载红外收发装置,可以使车辆自动转弯或纠偏,提高沙盘演示的智能性。
应理解,上述实施例中各步骤的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本发明实施例的实施过程构成任何限定。
所属领域的技术人员可以清楚地了解到,为了描述的方便和简洁,仅以上述各功能单元、模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能单元、模块完成,即将所述装置的内部结构划分成不同的功能单元或模块,以完成以上描述的全部或者部分功能。以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种智慧沙盘交通展示系统及控制方法
- 一种智慧车列交通系统沙盘演示装置及其控制方法