一种航天器高精度控制的设计方法
文献发布时间:2023-06-19 12:19:35
技术领域
本发明属于航天器交会控制领域,涉及一种航天器高精度控制设计方法。
背景技术
随着我国政治、经济、科技等的快速发展,我国综合国力不断增强,航天事业也取得了一个又一个进步。从2000年开始,我国的航天事业进入了一个快速发展的重要阶段,我国的航天事业已经走在了世界的前列。
目前航天器信息预测方法通常基于传统以李雅普诺夫稳定性理论所构建,进而讨论被控对象在无穷时间条件下的渐进稳定性情况。然而,若航天器在连续时间域内每一特定时刻的指向任务要求,即使其在有限时间后最终进入稳态,但在由初始时刻开始的稳定调节时间段内依然有可能由于所受扰动和不确定特性的影响,造成系统失真,降低系统运动平顺性,严重影响控制性能。
发明内容
本发明解决的技术问题是:克服现有技术的不足,提出一种航天器高精度控制设计方法,实现在任意时刻内,轨道控制精度均能满足预先的设计要求。。
本发明解决技术的方案是:
一种航天器高精度控制设计方法,包括如下步骤:
步骤一、根据牛顿运动理论建立目标航天器的非线性相对运动模型;
步骤二、考虑系统的不确定特性,通过线性化得到动态特性方程;
步骤三、将动态特性方程分解,获得x,y,z三个方向的动态特性;
步骤四、根据z方向的动态特性,设计z方向的一阶特性的虚拟控制信号
步骤五、基于z方向的一阶特性的虚拟控制信号
步骤六、重复步骤四至步骤五,依次设计y方向的二阶真实控制信号u
在上述的一种航天器高精度控制设计方法,所述步骤一中,建立非线性相对运动模型的具体方法为:
目标航天器运行在圆形轨道上,建立目标航天器旋转坐标系oxyz;其中,原点o位于目标航天器的质心;x方向为从原点o指向地心方向;y方向为目标航天器轨道的切线方向;z方向由右手定则确定;
目标航天器旋转坐标系oxyz以地球质心o′为圆心,在预设轨道半径R,预设轨道角速度n条件下进行旋转;
目标航天器的非线性相对运动模型为:
式中,μ为地球引力常量;
a
在上述的一种航天器高精度控制设计方法,所述步骤二中,动态特性方程为:
Y=CX
式中,X为动态特性方程状态;
Y为动态特性方程输出;
*
I
n为轨道角速度;
p为不确定性系数;
B=[0
C=[I
在上述的一种航天器高精度控制设计方法,所述步骤三中,获得x,y,z三个方向的动态特性的方法为:
定义x
则x方向的动态特性为:
式中,u
则y方向的动态特性为:
式中,u
则z方向的动态特性为:
式中,u
在上述的一种航天器高精度控制设计方法,所述步骤四中,一阶特性的虚拟控制信号的设计方法为:
令z方向的给定信号为r
进一步得到:
采用Funnel控制策略,定义z方向第一性能漏斗集合为
其中,e
设定λ
ψ
式中,a
基于z方向性能漏斗集合
式中,k
参数
在上述的一种航天器高精度控制设计方法,所述步骤五中,基于一阶特性的虚拟控制信号
定义z方向第二性能漏斗集合为
其中,e
设定λ
ψ
式中,a
则,二阶真实控制信号u
式中,k
参数
在上述的一种航天器高精度控制设计方法,所述步骤六中,设计y方向的二阶真实控制信号u
根据步骤四获得y方向一阶特性的虚拟控制信号
式中,k
设计x方向的二阶真实控制信号u
根据步骤四获得x方向一阶特性的虚拟控制信号
式中,k
本发明与现有技术相比的有益效果是:
(1)本发明采用的Funnel控制策略,是一种基于瞬时性能要求所设计的控制器设计方法,其核心特征为能够使得被控指标在任意时刻都能位于预先所设计的性能空间内,进而保证被控系统的瞬时动态性能;
(2)本发明通过矩阵分解将所得总体动态特性分为x,y,z三个子系统。根据每个子系统所具有的积分链形式设计其一阶特性的虚拟Funnel控制作用。进而基于该虚拟作用设计其二阶特性的真实Funnel控制作用。
附图说明
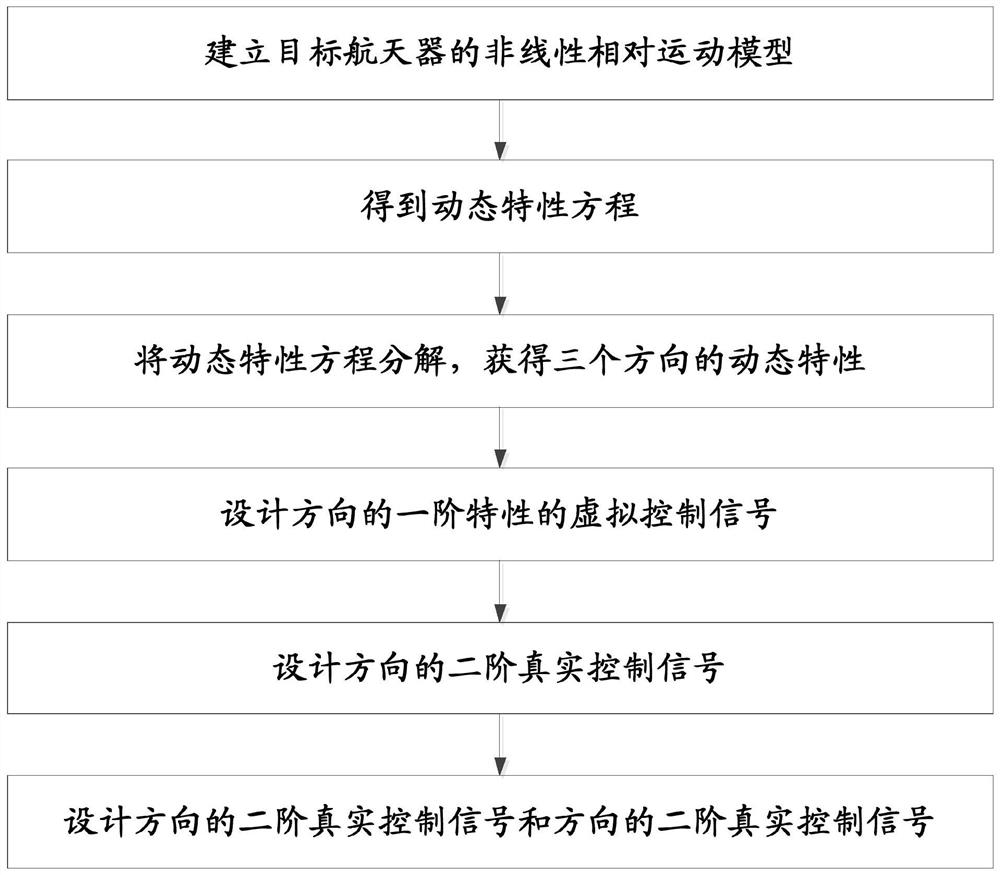
图1为本发明高精度控制设计流程图;
图2为实施例z方向虚拟Funnel信号设计以及误差分布情况;
图3为实施例z方向真实Funnel信号设计以及误差分布情况;
图4为实施例z方向轨道控制性能情况。
具体实施方式
下面结合实施例对本发明作进一步阐述。
本发明提供一种航天器高精度控制设计方法,采用的Funnel控制策略,是一种基于瞬时性能要求所设计的控制器设计方法,其核心特征为能够使得被控指标在任意时刻都能位于预先所设计的性能空间内,进而保证被控系统的瞬时动态性能。
航天器高精度控制设计方法,如图1所示,具体包括如下步骤:
步骤一、根据牛顿运动理论建立目标航天器的非线性相对运动模型;建立非线性相对运动模型的具体方法为:
目标航天器运行在圆形轨道上,建立目标航天器旋转坐标系oxyz;其中,原点o位于目标航天器的质心;x方向为从原点o指向地心方向;y方向为目标航天器轨道的切线方向;z方向由右手定则确定。
目标航天器旋转坐标系oxyz以地球质心o′为圆心,在预设轨道半径R,预设轨道角速度n条件下进行旋转。
根据牛顿运动理论可获得如下形式的目标航天器的非线性相对运动模型为:
式中,μ为地球引力常量;
a
步骤二、考虑系统的不确定特性,通过线性化得到动态特性方程;在两航天器距离小于目标航天器到地心距离条件下,通过线性化步骤1中公式得到:
即C-W方程动态特性方程。令
动态特性方程为:
Y=CX
式中,X为动态特性方程状态;
Y为动态特性方程输出;
*
I
n为轨道角速度;
p为不确定性系数;
B=[0
C=[I
考虑系统存在不确定性情况,更新矩阵A
步骤三、将动态特性方程分解,获得x,y,z三个方向的动态特性;获得x,y,z 三个方向的动态特性的方法为:
定义x
则x方向的动态特性为:
式中,u
则y方向的动态特性为:
式中,u
则z方向的动态特性为:
式中,u
步骤四、考虑到z方向不与其余方向耦合,首先设计z方向的给定信号为r
|z
Δ
令z方向的给定信号为r
进一步得到:
若将e
采用Funnel控制策略,定义z方向第一性能漏斗集合为
其中,e
设定λ
ψ
式中,a
a
使得初始误差位于性能漏斗
基于z方向性能漏斗集合
式中,k
参数
步骤五、在确定虚拟信号D
定义z方向第二性能漏斗集合为
其中,e
设定λ
ψ
式中,a
则,二阶真实控制信号u
式中,k
参数
步骤六、重复步骤四至步骤五,依次设计y方向的二阶真实控制信号u
根据步骤四获得y方向一阶特性的虚拟控制信号
式中,k
设计x方向的二阶真实控制信号u
根据步骤四获得x方向一阶特性的虚拟控制信号
式中,k
实施例
下面通过仿真,说明本发明所述方法的有效性。
在这部分,我们提供数值例子来说明所提出控制器设计方法的实用性。我们考虑一对相邻的航天器,假如追踪航天器质量为300kg,目标航天器的高度为 500km,并且角速度为1.2×10
以z-方向为例,设计性能漏斗参数为
{a
图2为z方向虚拟Funnel信号设计以及误差分布情况。图3为z方向真实 Funnel信号设计以及误差分布情况。通过分析发现,误差均能保证位于所设计的性能Funnel内,进而能够保证被控系统的瞬时控制性能。图4为z方向轨道控制性能情况。可以发现,系统跟踪效果良好。
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
- 一种航天器高精度控制的设计方法
- 一种航天器借力飞行轨道的设计方法