基于变频跟踪的永磁同步电机的位置检测装置及方法
文献发布时间:2023-06-19 12:21:13
技术领域
本发明涉及电机控制领域,特别是涉及基于变频跟踪的永磁同步电机的位置检测装置及方法。
背景技术
多相PMSM具有输出功率大、转矩脉动小、谐波含量低、可靠性高等优点,在电动汽车、船舶推进、航空航天、轨道交通等要求大功率及高可靠性的场合具有广阔的应用前景。多相PMSM控制系统需要安装位置传感器来检测转子位置信息,但是位置传感器会增加系统成本并降低了系统可靠性,限制了其应用场合。因此,为提高系统可靠性,无位置传感器检测技术是一种可行的技术方案。
多相PMSM无位置检测技术一般分为两类:一类是适用于低速和零速区域的高频注入法,其利用电机转子凸极效应估算转子位置和转速,估算精度与转速无关,并且对电机参数变化不敏感,但是这种方法需要PMSM具有一定的凸极性。此外,还必须把握好注入高频信号的幅值,否则会带来电磁噪声。另一类是适于中高速的转子位置和转速的估计,依赖于电机反电动势,如扩展卡尔曼滤波法、模型参考法和滑模观测器法等。
现有的滑模观测器会引起系统抖振,并且在检测过程中对反电动势动态估算精度低。
发明内容
为了解决上述问题,本发明提供了基于变频跟踪的永磁同步电机的位置检测装置及方法,通过定子电流跟踪抑制系统抖振,并提高了反电动势的估算精度。
本发明提供了基于变频跟踪的永磁同步电机的位置检测装置,包括:
滑模观测模块,用以根据定子电压u
锁相环模块,用以根据所述定子电流估算值
定子电流变频跟踪模块,用以根据所述定子电流频率f和所述定子电流偏差值得到反电动势估计值
三阶扩展状态观测器,用以根据所述反电动势估计值
本发明另一方面提供了基于变频跟踪的永磁同步电机的位置检测方法,包括如下步骤:
S1、根据定子电压u
S2、根据所述定子电流估算值
S3、根据所述定子电流频率f和所述定子电流偏差值得到反电动势估计值
S4、根据所述反电动势估计值
优选的,步骤S1具体包括:
S11、建立α-β坐标系下的永磁同步电机模型:
S12、根据所述永磁同步电机模型建立改进的滑模观测器,进而得到定子电流偏差值
其中,F()为FVT函数。
优选的,步骤S2包括:
S21、根据定子电流估计值
S22、电流变化量经PI调节得到角频率ω
S23,根据
优选的,步骤S22所述位置角
优选的,步骤S3所述反电动势估计值
优选的,步骤S4包括:
S41、根据转子位置角变化量
根据下式得到转子位置角估计值
S42、所述转子位置角估计值作为反馈,对转子位置角变化量
如上所述,本发明与现有技术相比,具有如下效果:
1.本发明将传统三相的无位置传感器控制技术的思想推广到了多维空间的电机数学模型上,实现了基于无位置传感器控制的六相永磁同步电机的稳定运行。
2.本发明设计一种FVT滑模观测器,采用FVT函数代替传统滑模的开关函数,用于抵抗转矩脉动和谐波分量对传统SMO估计的反电动势值产生影响,提高反电动势的估算精度。
3.本发明的三阶ESO对FVT得到的反电动势进行处理,估计出转子的位置和转速,本发明的三阶ESO能够抵抗扰动,提高估算精度。
4.本发明可以适用于航空航天、电动汽车等对电机的可靠性和动态性能有较高要求的场合,适用范围广泛。
附图说明
附图1是本发明双三相绕组中性点隔离的六相逆变器拓扑图;
附图2是本发明六相永磁同步电机定子绕组隔离中性点星型连接方式图;
附图3是本发明基于PLL的定子电流频率检测框图;
附图4是本发明FVT结构框图;
附图5是本发明基于三阶ESO的转子位置信息估计框图;
附图6是本发明三阶ESO结构图;
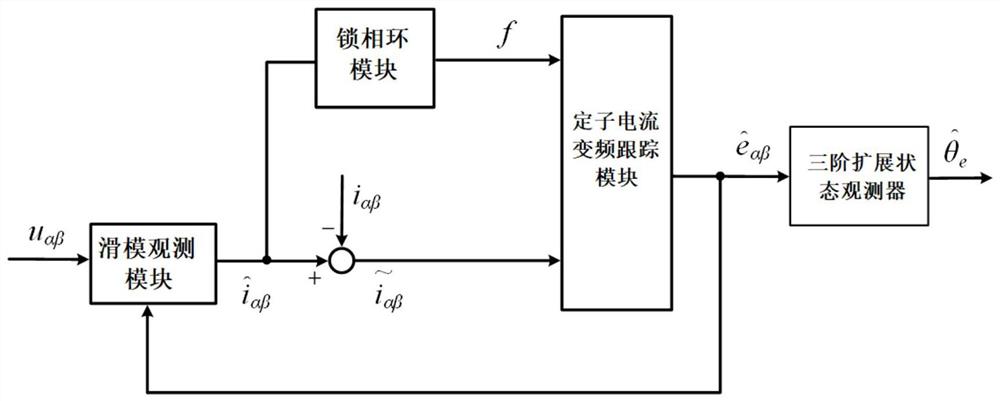
附图7是本发明新型SMO整体实现框图;
附图8是本发明500r/min转速波形比较图;
附图9是本发明500r/min转速误差波形图;
附图10是本发明500r/min转子位置角比较波形图;
附图11是本发明500r/min转子位置角误差波形图;
附图12是本发明500r/min转子位置角误差波形比较图;
附图13是本发明系统主流程图;
附图14是本发明主程序流程图;
附图15是本发明中断程序流程图;
附图16是本发明DSP电源电路图;
附图17是本发明电压采样电路图;
附图18是本发明交流电流采样电路图;
附图19是本发明直流偏置电路图;
附图20是本发明过流保护电路图;
附图21是本发明2SD315AI的驱动电路图;
具体实施方式
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图示中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
在一具体实施例中,如图7所示,本实施例的一种基于变频跟踪的永磁同步电机的位置检测装置,包括:
滑模观测模块,用以根据定子电压u
锁相环模块,用以根据所述定子电流估算值
定子电流变频跟踪模块,用以根据所述定子电流频率f和所述定子电流偏差值得到反电动势估计值
三阶扩展状态观测器,用以根据所述反电动势估计值
由图13所示的系统主流程图可见,基于变频跟踪的永磁同步电机的位置检测装置包括控制电路、电压电流采样电路、过流保护电路、IGBT驱动电路以及六相PMSM等部分。
本实施例控制系统的硬件电路主要由控制电路、电压电流采样电路、过流保护电路、IGBT驱动电路等部分组成。采用DSP架构,工作过程中,DSP芯片选用TI公司的TMS320F28335,所述的DSP芯片主要负责经过处理的采样信号的运算、指令电流提取、电流跟踪控制算法、无感控制算法,并将通过电压电流采样电路对采得的电机的相电压、相电流进行处理,传输到DSP控制电路中,通过DSP的ADC转换单元将采样电路得到的电压电流模拟信号进行数字化信号处理,然后在DSP芯片上通过SMO算法估算得到电机转子位置信息,实现转速和电流的双闭环,并将收到的调制信号数据经过调制波和载波比较的运算,得到带死区的PWM信号,PWM经过驱动电路放大后驱动各相逆变器中的功率开关管工作。
所述TMS320F28335的主程序主要完成系统初始化以及中断等内容,中断程序包括AD采样,故障诊断,FVT与ESO计算以及速度环和电流环等内容。在图14所示的系统的主程序流程图中,在系统在刚开始运行时候关闭一切中断后进行系统的初始化,完成了程序中所用到的各个单元的初始设定。在初始化完成后开中断,启动定时器,等待中断。
中断子程序的流程图如图15所示。用于完成相电压、电流的采样、估算转子位置和速度、速度环PI调节、电流环PI调节、坐标变换,通过SVPWM算法输出控制信号到功率模块进而控制电机运行。
如图16所示为DSP电源电路,采用TPS767D301芯片为DSP供电,输出两路稳定的直流电压,1.9V供给DSP内核,3.3V直流电供给I/O口。
如图17所示为电压采样电路,相电压和直流母线电压经过隔离运放来采集,其原理是在高压侧采用分压电阻来获取一个小电压,以差分的方式通过隔离运放来隔离电压,在隔离运放的输出侧同样以差分的方式输出,再经过一个运算放大器,把差分信号转为单端,输送到DSP。
如图18所示为交流电流采样电路,通过电流霍尔传感器实现电机交流电流的采集,电流霍尔的型号选用YHDC公司生产的HA2020,最大采样电流值为100A,供电电源为±15V,变比为2000:1。
如图19所示为直流偏置电路,将采样得到的电位信号通过偏置电路将电流采样信号的电压幅值限制在0-3V之间,1.65V的偏置电压由电阻R37、R39分压生成,电阻R39与电容C10组成了一阶RC滤波电路,由肖特基二极管D2构成采样电压的钳位电路,防止进入到DSP的电压太大,导致芯片损坏。
本实施例所述过流保护电路如图20所示,主要作用是防止电机的相电流超过IGBT开关管的额定值,导致IGBT开关管被烧坏,该电路由比较器构成电压比较器,将采样后的电流信号经过偏置电路,与限定值进行比较,若经偏置后的电流信号电压值高于4.5V或者低于0.6V,控制系统封死PWM输出。限定值的选取与电机额定值与采样电路的增益有关。
所述驱动电路用于将DSP输出的低电平小功率的控制信号放大,使之可以驱动功率开关管。如图21所示,本实施例的驱动电路选用瑞士CONCEPT公司推出的型号为2SD315AI的驱动模块,其具有直接模式和半桥模式两种工作方式,将驱动器的8脚MOD与VDD短接,工作于直接模式,此时通道A和B没有关系,两通道独立工作,并将RC1和RC2与GND短接,此时状态输出SO1/SO2也是独立工作。将驱动器的8脚MOD与GND短接,工作于半桥模式,两通道间产生一个死区时间,死区时间由引脚5和7间的RC网络调整,此时INB接高电平使能,INA为两个信号的总输入端。
在一具体实施例中,基于变频跟踪的永磁同步电机的位置检测的方法包括如下步骤:
S1、根据定子电压u
本实施例通过永磁同步电机模型设计滑模定子电流变频跟踪器,对电动势进行独立估计,具体包括:
S11、建立α-β坐标系下的永磁同步电机模型:
式中:i
S12、根据所述永磁同步电机模型建立改进的滑模观测器,进而得到定子电流偏差值
滑模观测器通过动态改变系统结构使状态变量轨迹沿着理想的滑模面移动,将电流分量作为状态变量,由式(1)可得:
根据滑模变结构控制理论,定义滑模面
式中:sign()为开关函数,为传统的滑模切换函数;
由式(3)与(4)可得电流偏差方程为:
式中:
由于传统SMO中符号函数的离散开关特性容易导致估计反电动势中存在高频抖振,针对这一问题,本实施例采用FVT函数来代替原有的开关函数sign(),来跟踪定子电流的基波,得到具体的电流偏差方程如(6)式所示:
在α-β坐标系下建立改进的滑模观测器如式(7)为:
S2、根据所述定子电流估算值
现有技术中通常采用比例谐振控制(PR)能够跟踪特定频率,定子电流误差可以在特定频率下收敛。但是,在实际电动机运行期间,定子电流的频率会随速度而变化,当频率变化时,传统的PR控制器无法准确跟踪AC信号。为了实现对变化的频率进行跟踪,本本实施例采用如图3所示的基于PLL的定子电流频率检测方法对定子电流频率进行检测,具体包括:
S21、根据定子电流估计值
S22、电流变化量经PI调节得到角频率ω
其中,K
位置角
S23,根据
S3、根据所述定子电流频率f和所述定子电流偏差值得到反电动势估计值
本实施例采用FVT根据定子电流偏差值
其中,K
为了适应变化的频率,将传递函数(11)转换为Z域,得:
进而转化为:
定义状态变量:
推导(14)的导数,以获得以下状态空间方程:
通过式(15)得到FVT函数为:
当运动点收敛到滑模面上时,根据式(7)改进的滑模观测器估计的反电动势为FVT函数输出y,等效为:
S4、根据所述反电动势估计值
S41、根据转子位置角变化量
如图5所示,为本实施例的三阶段扩展状态观测器的原理图,本实施例的建立如下关系:
其中,
根据转子运动方程中转速与转子位置的关系,可以建立以转子位置角θ
根据下式得到转子位置角估计值
S42、所述转子位置角估计值作为反馈,对转子位置角变化量
由上可见,本发明采用定子电流变频跟踪函数来代替传统的开关函数。通过改进SMO方法,实现了对电动势的独立估计,并在启动或变速状态下保持精度,其次,为了提高观测器的估计精度和抵抗扰动能力,将转子位置作为扰动项,通过电机机械运动方程构建了三阶扩展状态观测器(ESO)用来估计速度和转子位置。为了进一步对本发明的实施例进行说明和验证,本实施例通过六相PMSM无感运行仿真分析:
六相PMSM控制系统功率侧拓扑结构为交-直-交拓扑形式,即先将220V的工频交流电经过整流桥得到直流母线电压,再将整流桥输出的直流母线电压经过无极性滤波电容滤波和稳压后送入到六相电压型逆变器中,本实施例采用反并联二极管结构的六相电压型逆变器实现逆变处理。通过电压电流采样电路对采得的电机的相电压、相电流进行处理,并传输到DSP控制电路中,通过DSP的ADC转换单元将采样电路得到的电压电流模拟信号进行数字化信号处理,然后在DSP芯片上通过SMO算法估算得到电机转子位置信息,实现转速和电流的双闭环,电流闭环输出给到SVPWM调制算法,得到驱动电路的驱动信号;通过控制逆变器中功率器件的通断实现SVPWM调制,进而控制六相PMSM运行。
电机以5N·m的负载转矩起动,给定转速设定为500r/min。图8和图10分别显示了转速和转子位置角波形。图中实线表示转子的估计转速和位置,图中虚线表示电机测量的实际转速和位置。图9和图11分别显示了转速误差和转子位置角误差的波形。可以看出,转速误差在±1r/min以内,转子位置角误差很小。观测器能准确估计转速,跟踪转子位置角。图12显示了在500r/min传统SMO和改进SMO获得的转子位置角误差波形的比较。从图中可以看出,改进SMO估计的转子位置角误差小于传统SMO估计的转子位置角误差,因此提出的无位置传感器控制算法能够更准确地估计转子的角度。
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 基于变频跟踪的永磁同步电机的位置检测装置及方法
- 一种基于事件触发的永磁同步电机位置跟踪控制方法