两轴飞行器及其控制方法
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及一种飞行器,更具体地说涉及一种能够采用两个旋翼单元的动作来实现飞行的两轴飞行器及其控制方法。
背景技术
目前,大多飞行器以四旋翼作为主体,采用控制器进行控制飞行器四个旋翼单元的动作来实现悬停。如公告号为CN204871599U,名称为“四轴飞行器”的中国专利文献所公开的一种四轴飞行器,包括飞行器本体,所述飞行器本体上设置有支撑架,该支撑架设置有呈十字形交叉的四个机械臂,每个机械臂的端部设置有螺旋桨,所述螺旋桨通过驱动电机驱动其转动;在每个螺旋桨的螺旋桨轴顶部设置有超声传感器;在支撑架面对地面的一面安装有气压高度传感器,在飞行器本体上设置有控制箱,该控制箱内安装有集成控制器的芯片;在支撑架上还设置有一个突出端,在该突出端上设置有工业相机。
上述这种飞行器的主要缺点:四旋翼飞行器由于自身结构原因,飞行时必须保证足够空旷的环境。复杂的环境(如墙壁等)和狭小的空间(如建筑物夹缝等)会对其旋翼产生剧烈干扰,从而发生失稳现象,严重时甚至打桨坠机。
此外,由于控制器需要对四个旋翼单元的动作分别操作,因此人们操作非常不方便,需要大量训练才能实现控制飞行器正常飞行。而且由于四轴飞行器对电能消耗大,导致飞行时间短,给使用者带来了极大的不便。
发明内容
本发明的目的,是提供一种两轴飞行器,这种两轴飞行器能够采用两个旋翼单元的动作来实现飞行。采用的技术方案如下:
一种两轴飞行器,包括飞行器本体,其特征在于:两轴飞行器还包括两条可收缩支撑臂、两个旋翼单元,两条可收缩支撑臂首端分别可转动地安装在飞行器本体上,两个旋翼单元分别安装在两条可收缩支撑臂末端;不使用的时候,转动可收缩支撑臂,使之贴近飞行器本体,以大幅减少占用的空间;使用前,转动可收缩支撑臂,使其展开,以操纵两轴飞行器飞行。
较优的方案,所述旋翼单元包括舵机、安装座、驱动电机、螺旋桨,舵机安装在对应可收缩支撑臂末端,安装座安装在舵机的转轴上,驱动电机安装在安装座上,螺旋桨安装在驱动电机上。
较优的方案,所述两轴飞行器还包括至少一个检测装置,检测装置安装在飞行器本体上,检测装置检测并发出检测信号。
更优的方案,所述检测装置的数量为多个,各检测装置分别选用陀螺仪传感器、地磁传感器、惯性测量元器件或气压计。
更优的方案,所述两轴飞行器还包括控制装置,控制装置与检测装置、舵机、驱动电机分别电连接。
更优的方案,所述检测装置发出检测信号,控制装置接收遥控信号、检测信号并进行处理,然后发出控制信号分别控制两个舵机、两个驱动电机工作。
本申请的另一个目的,是提供一种上述两轴飞行器的控制方法,具体方案如下:
一种上述两轴飞行器的控制方法,其特征在于:包括以下步骤:
1)各检测装置检测并输出检测信号;
2)控制装置接收检测信号,处理后,输出四个控制信号;
3)两个舵机、两个驱动电机分别接收四个控制信号并工作。
较优的方案,所述控制方法采用姿态控制算法控制两轴飞行器飞行,该姿态控制算法利用捷联惯导原理,依靠飞行器本身固联的陀螺仪、地磁传感器获得机体本身相对于全局坐标系下的机体俯仰pitch、横滚roll,航向yaw的角度,进而用于控制飞行器平衡。
更优的方案,四个控制信号分别为第一个驱动电机的力M1、第二个驱动电机的力M2、第一个舵机的力M3、第二个舵机的力M4,
M1 = 升力 + 左右roll控制量;
M2 = 升力 - 左右roll控制量;
M3 = yaw航向控制量 - 前后pitch控制量;
M4 = -yaw航向控制量 - 前后pitch控制量。
更优的方案,所述控制方法采用PID方式完成对无人飞行器姿态功能控制,分别对两轴飞行器航向yaw、俯仰pitch、横滚roll基于以上方法,采用串级PID控制方式进行控制,其中前级PID为实际角度与期望角度之间的误差输出,即期望角速率,后级控制输入为期望角速率与实际测量角速率之间的误差,输出为四路电机控制量。
更优的方案,pid的控制规律为:
u(x)为两轴无人飞行器电机输出控制量,err(t)为实际测量参数与期望值之间的误差。
更优的方案,所述公式在离散系统中可改写为:
更优的方案,通过坐标变换矩阵可获得机体相对全局坐标的角速率、加速度等控制信息,即通过惯性测量元器件获得的角速度、加速度等信息可通过坐标变换矩阵转换为全局坐标系下信息,再结合姿态角信息,对飞行器进行控制。
更优的方案,根据姿态角,可以获得机体坐标系到全局坐标系的旋转变换公式如下:
其中,θ为pitch,Ψ为yaw,Φ为roll。
本发明对照现有技术的有益效果是,由于采用两条可收缩支撑臂、两个旋翼单元取代现有四轴方案,因此能够大大减少飞行器的空间,而且控制更容易,大大降低耗费的电能,大幅增加了飞行器的飞行时间,有效地降低了生产成本和使用者操作的难度。
附图说明
图1是本发明优选实施例的收缩状态结构示意图;
图2是图1所示优选实施例的剖视图;
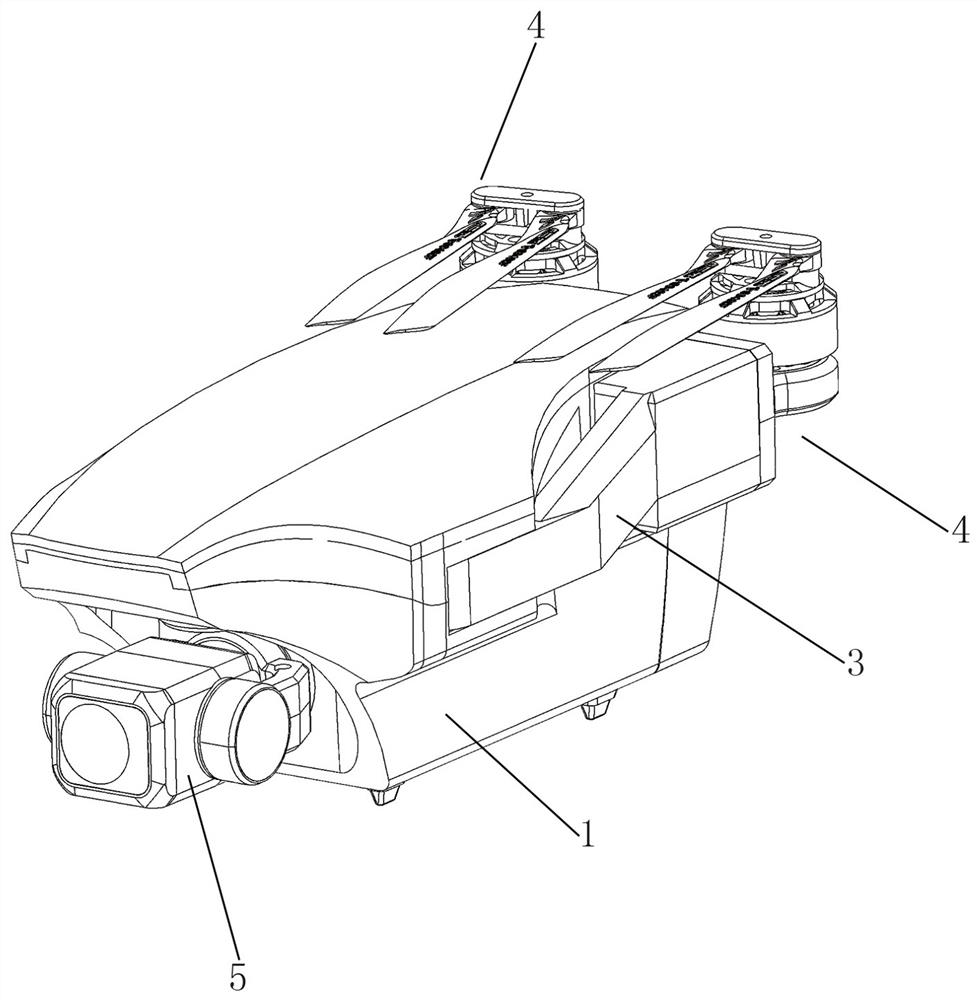
图3是图1所示优选实施例的展开状态结构示意图;
图4是图1所示优选实施例可收缩支撑臂、旋翼单元的结构示意图;
图5是图1所示优选实施例的电路原理方框图;
图6是图1所示优选实施例的两个驱动电机的力矩图;
图7是图1所示优选实施例的姿态角示意图。
具体实施方式
如图1-7所示,本优选实施例中的两轴飞行器,包括飞行器本体1、陀螺仪传感器2、两条可收缩支撑臂3、两个旋翼单元4,陀螺仪传感器2安装在飞行器本体1内,两条可收缩支撑臂3首端分别可转动地安装在飞行器本体1上,两个旋翼单元4分别安装在两条可收缩支撑臂3末端。不使用的时候,转动可收缩支撑臂3,使之贴近飞行器本体1,即可大幅减少占用的空间;使用前,转动可收缩支撑臂3,使其展开,就可以操纵两轴飞行器飞行。
所述旋翼单元4包括舵机401、安装座402、驱动电机403、螺旋桨404,舵机401安装在对应可收缩支撑臂3末端,安装座402安装在舵机401的转轴上,驱动电机403安装在安装座402上,螺旋桨404安装在驱动电机403上。
所述两轴飞行器还包括四个检测装置,检测装置检测加速度等数据并发出检测信号。四个检测装置分别为陀螺仪传感器2、地磁传感器5、惯性测量元器件7、气压计8。
所述两轴飞行器还包括控制装置6,控制装置6与陀螺仪传感器2、地磁传感器5、惯性测量元器件7、气压计8、舵机401、驱动电机403分别电连接。
所述陀螺仪传感器2、地磁传感器5、惯性测量元器件7、气压计8分别发出检测信号,控制装置6接收检测信号并进行处理,然后发出控制信号分别控制舵机401、驱动电机403工作。
下面结合图1-7介绍一下工作过程:
所述陀螺仪传感器2、地磁传感器5、惯性测量元器件7、气压计8分别发出检测信号,控制装置6接收遥控信号、检测信号并进行处理,然后发出控制信号分别控制两个舵机401、两个驱动电机403工作。
在飞行过程中,如果需要前进,则控制装置6控制舵机401工作,使得转轴顺时针转动,从而带动安装座402转动,使得螺旋桨404向前倾斜;
如果需要后退,则控制装置6控制舵机401工作,使得转轴逆时针转动,从而带动安装座402转动,使得螺旋桨404向后倾斜;
如果要左拐,则控制装置6控制位于右侧的驱动电机403加速,而位于左侧的驱动电机403减速;
如果要右拐,则控制装置6控制左侧驱动电机403加速,而位于右侧的驱动电机403减速;
如果要上升,则控制装置6控制两个驱动电机403同步加速;
如果要下降,则控制装置6控制两个驱动电机403同步减速。
所述两轴飞行器的控制方法,通过倾角控制将高速旋转螺旋桨产生的力矩分配至垂直、前后、左右三个方向,由陀螺效应维持机体平衡。
如图6所示,按照航空次序欧拉角的定义方法,左右为roll,前后为pitch,旋转为yaw。位于左侧的驱动电机403的力设为M1,M1对机体产生的力矩可以分解为垂直分量M10和水平分量M11,其中M11垂直于电机臂,又可以分解为前后分量M110和左右分量M111。同理,对位于右侧的驱动电机403的力设为M2,但M2力矩方向相反,公式如下:
因此,所述控制方法,机体升力和左右平衡可通过直接控制螺旋桨电机获得,航向控制与前后平衡可通过舵机倾斜控制,其控制规律如下:
M1 = 升力 + 左右roll控制量;
M2 = 升力 - 左右roll控制量;
M3 = yaw航向控制量 - 前后pitch控制量;
M4 = -yaw航向控制量 - 前后pitch控制量;
其中, M3为位于左侧的舵机401的力,M4为位于右侧的舵机401的力。
所述控制方法采用姿态控制算法控制两轴飞行器飞行,该姿态控制算法利用捷联惯导原理,依靠飞行器本身固联的陀螺仪、地磁传感器、气压计获得机体本身相对于全局坐标系下的机体俯仰pitch、横滚roll,航向yaw的角度,进而用于控制飞行器平衡。
如图7所示,根据姿态角,可以获得机体坐标系到全局坐标系的旋转变换公式如下:
其中,θ为pitch,Ψ为yaw,Φ为roll。
通过坐标变换矩阵可获得机体相对全局坐标的角速率、加速度等控制信息,即通过惯性测量元器件获得的角速度、加速度等信息可通过坐标变换矩阵转换为全局坐标系下信息。结合姿态角信息可完成对飞行器控制率的设计。
所述控制方法采用PID方式完成对无人飞行器姿态功能控制,pid的控制规律为:
u(x)为两轴无人飞行器电机输出控制量,err(t)为实际测量参数与期望值之间的误差,在离散系统中可改写为
分别对两轴飞行器航向yaw、俯仰pitch、横滚roll基于以上方法,采用串级PID控制方式进行控制,其中前级PID为实际角度与期望角度之间的误差输出,即期望角速率,后级控制输入为期望角速率与实际测量角速率之间的误差,输出为四路电机控制量。
航向yaw,为左右转动参数;俯仰pitch为前进、后退参数,横滚roll为左侧飞、右侧飞参数。
本实施例是依靠陀螺仪传感器2、地磁传感器5、惯性测量元器件7、气压计8分别发出检测信号,控制装置根据上述控制方法输出控制信号,让两个舵机401、两个驱动电机403工作,完成飞行(起飞、各种飞行动作、降落)。
此外,需要说明的是,本说明书中所描述的具体实施例,其各部分名称等可以不同,凡依本发明专利构思所述的构造、特征及原理所做的等效或简单变化,均包括于本发明专利的保护范围内。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
- 一种流线型机身的两轴倾斜翼飞行器及控制方法
- 一种两轴飞行器及可搭载大型横幅的两轴飞行系统