一种基于多源数据融合的飞行器力载荷在线预示方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及一种飞行器力载荷在线预示技术,尤其涉及一种基于多源数据融合的飞行器力载荷在线预示方法,属于载荷识别技术领域。通过在线测量飞行器结构动应变响应,在线提前预示后续时刻的力载荷环境参数。
背景技术
由于飞行器强度和刚度的限制,力载荷环境参数是飞行器轨迹重规划时的重要输入。飞行器在发射和运行过程中(特别是穿越大气层阶段)要经历复杂和严酷的力载荷环境,往往要承受气动力、气动热、噪声、发动机推力、火工品爆炸、级间分离等作用而产生较为复杂的大振幅宽频带的外载荷。想要直接测量得到力载荷是非常困难的,例如恶劣的工作条件会使得直接测量力载荷的传感器难以安装,或者力载荷传感器的设置会阻碍结构的正常运行甚至改变结构的动态特性。但将应变传感器安装在对载荷敏感的结构部位上则是可实现的,通过建立载荷辨识和预示模型,即可建立力载荷和应变响应之间的映射关系。现有的动载荷辨识模型可以用于在线辨识当前时刻的力载荷,但是无法提前预示力载荷。本发明提出一种力载荷在线预示方法,在飞行过程中,将测量得到的应变响应代入建立的预示模型,提前预示得到飞行器在飞行过程中后续时刻的力载荷,从而为飞行器轨迹重规划争取时间裕度。
发明内容
本发明的目的在于为飞行器的轨迹重规划提供一种基于多源数据融合的飞行器力载荷在线预示方法,提前预示得到后续时刻的力载荷环境参数。
本发明采用的技术方案如下:
一种基于多源数据融合的飞行器力载荷在线预示方法,步骤如下:
首先通过对飞行器的飞行力学进行理论分析,计算得到全弹道的飞行参数数据和受力状态(气动力,气动力矩,推力,重力)。上述飞行力学分析需建立飞行器质心的运动学方程和动力学方程:
飞行器质心的速度分量在地面坐标系与机体坐标系的转换方程:
绕质心转动的运动学方程:
机体坐标系中飞行器质心动力学方程的标量形式:
轴对称飞行器绕质心转动的动力学方程的最简形式:
其中α、β、φ、θ、ψ、
建立有限元模型,将气动力,气动力矩,推力,重力施加到飞行器结构的有限元模型上,完成瞬态动力学求解,得到飞行过程中各点的动应变设计值。
依据动应变设计值和力载荷的设计值建立基于神经网络的力载荷的在线辨识模型。上述力载荷的设计值是将飞行器简化为一维梁单元,通过弹身内力的公式计算得到,弹身内力包括弹身轴向力N,剪力Q和弯矩M,其通用表达式分别为:
其中G
在当前时刻,在线测量得到的动应变测量值,代入已经建立好的力载荷的在线辨识模型,得到力载荷辨识值。
基于多源数据融合,将力载荷的辨识值减去对应的设计值,得到当前时刻的力载荷偏差;基于神经网络,建立力载荷偏差和飞行参数之间的预示模型,得到后续时刻(5-10s)的力载荷偏差预示值。
所述的基于神经网络,建立力载荷偏差和飞行参数之间的预示模型的方法具体如下:
Step1:确定预示模型的输入变量和输出变量,输入变量包括若干个关键飞行参数和已解算得到的力载荷偏差,输出变量为待预示的力载荷偏差;
Step2:对输入变量和输出变量进行归一化处理,得到神经网络的包含若干个关键飞行参数数据的输入层和包含已解算得到的力载荷偏差数据的输出层的训练数据库;
Step3:构建神经网络预示模型;
Step4:初始化网络权重和参数,设定迭代步数epochs,更新阈值delta;
Step5:计算第k次迭代的误差
Step6:如果error
Step7:将后续时刻的飞行参数代入训练好的神经网络预示模型,输出力载荷偏差的预示值。
将力载荷偏差预示值和后续时刻力载荷的设计值进行多源数据融合,得到力载荷预示值;每隔2s进行一次力载荷在线预示,得到5-10s的预示值,每次均保存后2s的预示值,直到遍历全弹道时间。
基于多源数据融合的飞行器力载荷在线预示方法,还可以用于飞行器强度和刚度的预示。按上述方法基于神经网络,建立应力或振动位移偏差和飞行参数之间的预示模型,得到后续时刻(5-10s)的应力或振动位移偏差预示值。将应力或振动位移偏差预示值和后续时刻的设计值进行多源数据融合,得到应力或振动位移预示值;每隔2s进行一次力载荷在线预示,得到5-10s的预示值,每次均保存后2s的预示值,直到遍历全弹道时间。
本发明的有益效果:
力载荷环境参数是飞行器轨迹规划时的重要约束条件,本发明通过建立力载荷在线预示模型,将飞行过程中测量得到的应变响应代入预示模型,提前预示得到飞行器在后续时刻的力载荷,可以用于修正力载荷设计值的不确定性,并为飞行器轨迹重规划争取了时间裕度。
附图说明
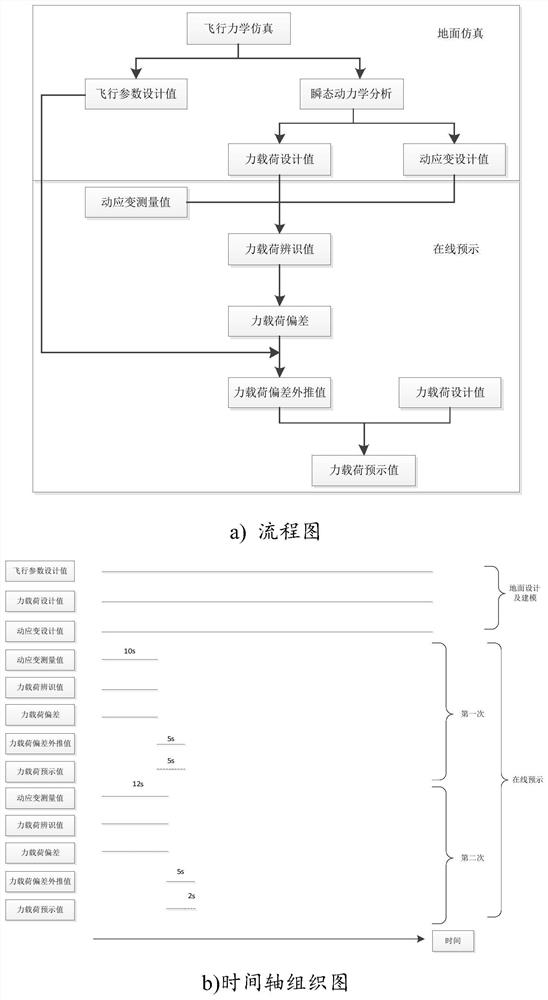
图1为预示方法示意图。
图2飞行力学分析得到的飞行参数。
图3 0-60s力载荷设计值。
图4提前5s的力载荷预示结果。
图5应力预示结果和设计值对比。
图6振动位移预示结果和设计值对比。
具体实施方式
下面结合附图,从对某导弹的力载荷预示仿真和结构强度和刚度的预示仿真详细描述本发明,本发明的目的和效果将变得更加明显。
如图1为本发明基于多源数据融合的飞行器力载荷在线预示方法的示意图,该方法具体包括如下步骤:
1)力载荷预示仿真
以某导弹为研究对象,通过飞行力学公式和弹身内力计算公式得到飞行参数数据和力载荷数据,整个数据集为60s,采样频率为400Hz。飞行参数为速度、高度、迎角、极坐标的角度、俯仰程序角、法向过载和轴向过载等,飞行参数时程曲线如图2。
力载荷为某导弹模型一二级级间段截面的内力:轴力、剪力和弯矩。通过弹身内力的公式计算得到力载荷的设计值如图3。
为了减少在线训练神经网络预示模型的时间,对于三个力载荷,预示模型的输入变量选为飞行速度。第一次迭代时,选择0-10s的力载荷偏差和飞行参数数据作为训练集训练神经网络预示模型。然后把10-15s的飞行速度代入预示模型,得到10-15s的力载荷偏差。然后将10-15s的力载荷偏差加上力载荷设计值,得到10-15s的力载荷预测结果并保存下来。
接着进行第二次迭代,选择0-12s的力载荷偏差和飞行参数数据作为训练集训练神经网络预示模型。然后把12-17s的飞行速度代入预示模型,得到12-17s的力载荷偏差。然后将12-17s的力载荷偏差加上力载荷设计值,得到12-17s的力载荷预测结果,并将15-17s的力载荷预测结果保存下来。
一共进行24次迭代,得到10-60s的力载荷预测结果如图4。由预示结果可知,轴力的预示精度为0.063%,剪力的预示精度为1.51%,弯矩的预示精度为2.62%。
2)结构强度和刚度的预示仿真
采用本项目建立的力载荷预示模型,对结构的一、二级级间断截面上3个节点的应力和振动位移进行在线预示。预示模型的输入为:输入层数据:飞行参数和输出层数据:应力或振动位移偏差。
和力载荷预示类似,弹体起飞后10s即可给出预示数据,可提前5-10s预测得到力载荷,间隔2s更新预示数据。3个节点轴向应力提前5s的预示结果和设计值对比如图5。
由对比结果可知,从第10s开始,866点应力的预示精度为1.49%,924点应力的预示精度1.20%,982点应力的预示精度1.19%,应力的预示精度和力载荷的预示精度相当。
866点位移提前5s的预示结果和设计值对比如图6。
由预示结果可知,从第10s开始,能够给出位移预示值,但是精度很差,约为49%。20s以后的预示精度有了明显的提高,ux位移的预示精度为10.88%,uy位移的预示精度为15.01%,uz位移的预示精度为14.22%。位移的预示精度比力载荷的预示精度稍微差些。