一种晶圆角度矫正方法、系统及存储介质
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及电子技术领域,尤其涉及一种晶圆角度矫正方法、系统及存储介质。
背景技术
随着科学技术的进步,芯片以及元器件的尺寸越来越小,对芯片以及元器件的贴合精度越来越高,才能在提高效率的同时确保良率,这就对自动贴合设备各个工位的位置精度提出更高的要求,其中晶圆角度的偏差是影响良率的关键因素之一。
如图1-4所示,常规视觉矫正方法是先使用模板识别算法求出晶圆偏转的角度,然后使晶圆环转动相同角度从而使存在角度偏差的晶圆变正。但此种方法受限于晶圆环尺寸及相机视野的大小,如果晶圆处于离圆心较远的位置或者晶圆偏差的角度较大,都会导致旋转角度后目标晶圆脱离相机视野范围从而导致角度矫正失败。
发明内容
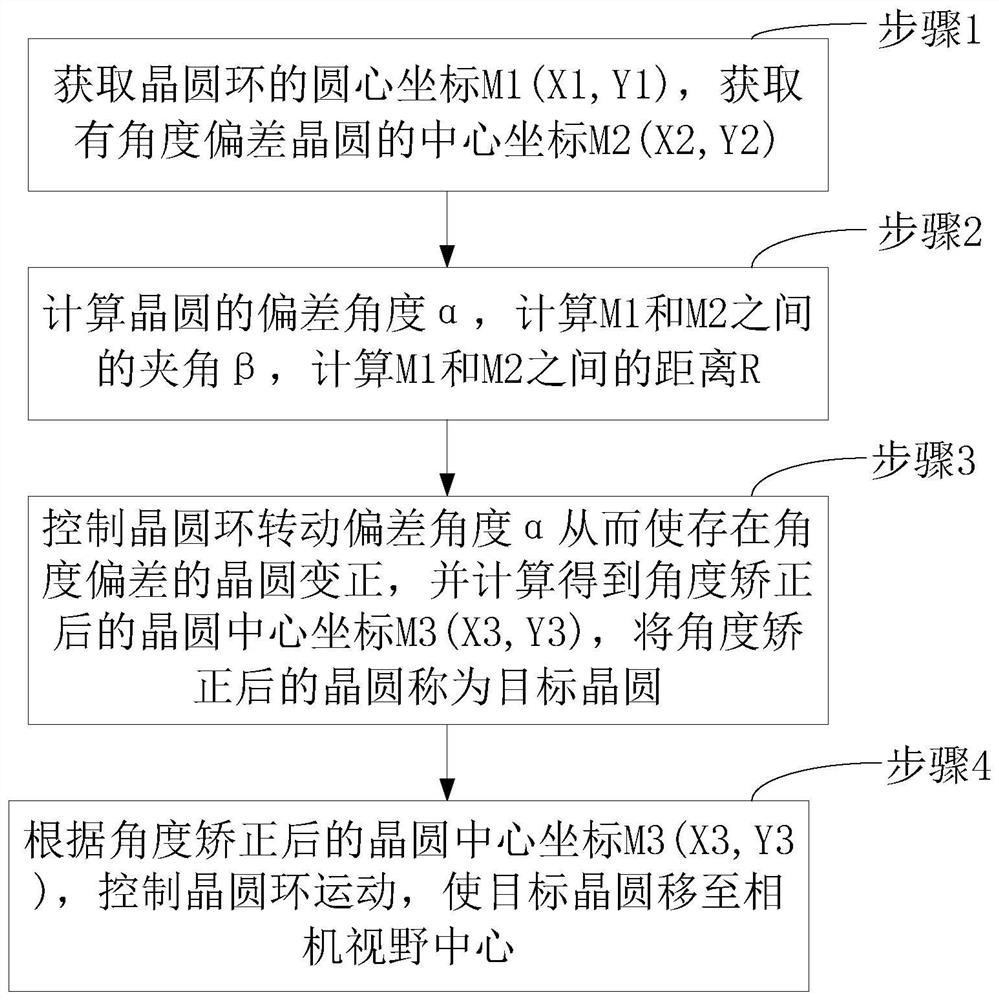
本发明提供了一种晶圆角度矫正方法,包括如下步骤:
步骤1:获取晶圆环的圆心坐标M1(X1,Y1),获取有角度偏差晶圆的中心坐标M2(X2,Y2);
步骤2:计算晶圆的偏差角度α,计算M1和M2之间的夹角β,计算M1和M2之间的距离R;
步骤3:控制晶圆环转动偏差角度α从而使存在角度偏差的晶圆变正,并计算得到角度矫正后的晶圆中心坐标M3(X3,Y3),将角度矫正后的晶圆称为目标晶圆;
步骤4:根据角度矫正后的晶圆中心坐标M3(X3,Y3),控制晶圆环XY平台运动,使目标晶圆移至相机视野中心。
作为本发明的进一步改进,在所述步骤2中,
作为本发明的进一步改进,在所述步骤3中,X3=X1+R*cos(α-β),Y3=Y1+R*sin(α-β)。
作为本发明的进一步改进,在所述步骤1中,晶圆环的圆心坐标通过如下方式获取:首先保证相机视野内至少存在一颗晶圆,然后转动晶圆环,每次转动设定角度,一共转动设定次数,在转动过程中使用飞拍间隔拍照识别晶圆中心,通过算法区分不同圆弧曲线,每段圆弧曲线可以拟合出一个圆心,多点圆心再做数据处理,最终计算出精度最高的圆心,并确认该精度最高的圆心坐标。
作为本发明的进一步改进,在所述步骤1中,设定角度为360°,设定次数为10次。
本发明还提供了一种晶圆角度矫正系统,包括:
获取模块:用于获取晶圆环的圆心坐标M1(X1,Y1),获取有角度偏差晶圆的中心坐标M2(X2,Y2);
计算模块:用于计算晶圆的偏差角度α,计算M1和M2之间的夹角β,计算M1和M2之间的距离R;
矫正模块:用于控制晶圆环转动偏差角度α从而使存在角度偏差的晶圆变正,并计算得到角度矫正后的晶圆中心坐标M3(X3,Y3),将角度矫正后的晶圆称为目标晶圆;
定位模块:用于根据角度矫正后的晶圆中心坐标M3(X3,Y3),控制晶圆环XY平台运动,使目标晶圆移至相机视野中心。
作为本发明的进一步改进,在所述计算模块中,
作为本发明的进一步改进,在所述矫正模块中,X3=X1+R*cos(α-β),Y3=Y1+R*sin(α-β)。
作为本发明的进一步改进,在所述获取模块中,晶圆环的圆心坐标通过如下方式获取:首先保证相机视野内至少存在一颗晶圆,然后转动晶圆环,每次转动360°,一共转动10次,在转动过程中使用飞拍间隔拍照识别晶圆中心,通过算法区分不同圆弧曲线,每段圆弧曲线可以拟合出一个圆心,多点圆心再做数据处理,最终计算出精度最高的圆心,并确认该精度最高的圆心坐标。
本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序配置为由处理器调用时实现本发明所述的晶圆角度矫正方法的步骤。
本发明的有益效果是:本发明可无视晶圆环尺寸及相机视野大小,完美矫正每个存在角度偏差的晶圆。
附图说明
图1是各种角度偏差的晶圆分布示意图;
图2是晶圆角度偏差示意图;
图3是晶圆环旋转角度后的示意图;
图4是晶圆角度矫正示意图;
图5是本发明的方法流程图。
具体实施方式
如图5所示,本发明公开了一种晶圆角度矫正方法,用于取晶端进行晶圆角度矫正。
在取晶端,蓝膜上设有多个晶圆,蓝膜安装在晶圆环上,通过相机、顶针和摆臂吸嘴的配合,使蓝膜上的晶圆转移到摆臂吸嘴上,从而完成取晶,但是,当蓝膜上的晶圆角度有偏差时,必然影响良率,所以,本发明对蓝膜上的晶圆进行角度矫正,具体方法如下:
步骤1:获取晶圆环的圆心坐标M1(X1,Y1),获取有角度偏差晶圆的中心坐标M2(X2,Y2)。
步骤2:计算晶圆的偏差角度α,计算M1和M2之间的夹角β,计算M1和M2之间的距离R;
步骤3:控制晶圆环转动偏差角度α从而使存在角度偏差的晶圆变正,并计算得到角度矫正后的晶圆中心坐标M3(X3,Y3),将角度矫正后的晶圆称为目标晶圆;X3=X1+R*cos(α-β),Y3=Y1+R*sin(α-β)。
步骤4:根据角度矫正后的晶圆中心坐标M3(X3,Y3),控制晶圆环进行XY方向运动,使目标晶圆移至相机视野中心,然后等待下一步指令(例如,进行拍照定位),这样即可精准的矫正每颗有角度偏差的晶圆。
当然这种矫正方法依托于精准的晶圆环的圆心坐标,为了得到精准的晶圆环的圆心坐标,本发明开发一种自动找寻圆心的算法,具体为:在所述步骤1中,晶圆环的圆心坐标通过如下方式获取:首先保证相机视野内至少存在一颗晶圆,然后转动晶圆环,每次转动360°,一共转动10次,在转动过程中使用飞拍间隔拍照识别晶圆中心,通过算法区分不同圆弧曲线,每段圆弧曲线可以拟合出一个圆心,多点圆心再做数据处理,最终计算出精度最高的圆心,并确认该精度最高的圆心坐标。
本发明还公开了一种晶圆角度矫正系统,包括:
获取模块:用于获取晶圆环的圆心坐标M1(X1,Y1),获取有角度偏差晶圆的中心坐标M2(X2,Y2);
计算模块:用于计算晶圆的偏差角度α,计算M1和M2之间的夹角β,计算M1和M2之间的距离R;
矫正模块:用于控制晶圆环转动偏差角度α从而使存在角度偏差的晶圆变正,并计算得到角度矫正后的晶圆中心坐标M3(X3,Y3),将角度矫正后的晶圆称为目标晶圆;
定位模块:用于根据角度矫正后的晶圆中心坐标M3(X3,Y3),控制晶圆环XY平台运动,使目标晶圆移至相机视野中心,然后等待下一步指令(例如,进行拍照定位)。
在所述计算模块中,
在所述获取模块中,晶圆环的圆心坐标通过如下方式获取:首先保证相机视野内至少存在一颗晶圆,然后转动晶圆环,每次转动360°,一共转动10次,在转动过程中使用飞拍间隔拍照识别晶圆中心,通过算法区分不同圆弧曲线,每段圆弧曲线可以拟合出一个圆心,多点圆心再做数据处理,最终计算出精度最高的圆心,并确认该精度最高的圆心坐标。
本发明还公开了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序配置为由处理器调用时实现本发明所述的晶圆角度矫正方法的步骤。
本发明的有益效果如下:
1.本发明可无视晶圆环尺寸及相机视野大小,完美矫正每个存在角度偏差的晶圆。
2.本发明可自动寻找精准晶圆环中心,不用靠机械中心保证,即使XY平台原点变动,也可使用自动功能重新找寻精确原点。
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
- 一种晶圆角度矫正方法、系统及存储介质
- 一种测量晶圆损伤深度的方法、系统及计算机存储介质