一种远程操控的植物照护装置及方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及植物照护装置技术领域,尤其涉及一种远程操控的植物照护装置及方法。
背景技术
育苗技术的效果与成活率基本上受限于环境条件创造与气候因子,说明不管哪种育苗技术,环境是实现基因表达的关键,农业生产作为人工参与的一种技术性工作,完全可以发挥人工创造环境的能力来解决这些气候或环境的不利因素,使育苗效果得以改善。更重要的是,环境能使植物在常规下不能表达的基因或潜能,在人工创造的环境下得以表达与体现。
近年来,我国工厂化农业领域如温室设施类型、栽培模式、农产品品质等方面取得了长足进步,但在环境控制技术和智能化生产管理等方面基本没有突破我国粗放式和经验式技术水准,离发达国家如日本、美国、以色列和荷兰的生产水平还有很大差距。由于农业生产的不确定性、复杂性以及对低成本的需求,微电子技术在农业领域的应用普及推广远远落后于工业、军事等其他领域,很多从国外引进的高成本、高能耗的环境控制技术也未能在中国得到实际应用。因此,我国需要尽快开发具有自主知识产权的适合我国国情的低成本、低能耗的工厂化生产的环境控制与智能化生产管理技术。利用合理的环境调控技术不仅能提高农产品的产量与品质,还能调节商品上市时间,实现规范化、标准化、精细化生产,彻底把传统的粗放式、经验式的农业生产改造成精细式、智能式的工厂化生产,大幅度提高农业生产的经济效益、社会效益和生态效益。
当前世界上植物工厂化生产系统根据光照来源的不同分为自然光利用型和人工光与自然光并用型的两大类。自然光利用型植物工厂利用自然光,厂房为大型玻璃温室或连栋塑料温室,室内设置各种环境因子的监测和调控设备。这类植物工厂多少受到自然条件的影响,种植植物种类也有一定程度限制,其最大难题是如何实现夏季降温与冬季加温的低成本和低能耗。此外,现有的生产系统不存在能够进行植株生长过程中的自动巡检和异常生长植株的识别功能,无法在没有工作人员人为操作的情况下,对常见的植株生长异常症状进行识别和分析。无法辅助工作人员在出现异常的初期即完成对应植株的处理和维护。
中国专利CN109656284A公开了一种基于物联网植物工厂监控系统,利用现代物联网技术,设计基于物联网植物工厂监管系统,包含农产品生长环境监控系统和农产品追溯系统两部分。下位机通过在温室大棚内布设ZigBee无线传感网络,精确感知温室大棚内的环境因子,并通过ZigBee-Wifi网关将采集的数据通过分布式中间件利用Web service技术传送到上位机网站;通过电脑登陆农产品生长环境监控系统查看实时环境信息,远程操作大棚内的滴灌、温控和补光等设施;还可以在大棚内种植农产品过程中使用电脑登录农产品追溯系统,按追溯编号录入农产品的种植日期、名称、采摘时间、物流信息、销售路径等信息。将载有农产品信息的二维码贴在包装盒上,消费者通过手机扫二维码标签查询详细信息。该专利不存在对特定植株的具体照护,无法自动完成植株是否存在生长异常的观测。该专利仅能够进行整个植物工厂种植空间大范围的生长环境调节,无法针对个别生产异常的植株进行准确识别和病症原由的简单分析。
因此,需要一种能够通过远程控制手段完成种植空间内植株生长是否符合需求、是否出现生长异常情况的植株检测和护理装置。
此外,一方面由于对本领域技术人员的理解存在差异;另一方面由于发明人做出本发明时研究了大量文献和专利,但篇幅所限并未详细罗列所有的细节与内容,然而这绝非本发明不具备这些现有技术的特征,相反本发明已经具备现有技术的所有特征,而且申请人保留在背景技术中增加相关现有技术之权利。
发明内容
在实际环境条件下,通过相应设备获取植株生理状况信息,按照营养控制模型和植株的需求,向植株提供营养,从而使植株达到最佳生长状态。为了能够帮助工厂化农业种植的植株进行高质量的培育,植物工厂通常是需要依据能够对种植培育空间的温度、湿度、光照、CO
目前,工厂化农业采用的环境控制方法通常假定设施环境内空气温度、湿度等大气因素的状况在环境空间内具有一致性,事实上这些因素的状况在空间内并不一致,而是呈现出一种空间分布状态,因此要更加精确地为植株创造最佳生长条件,就需要控制此因素在设施环境空间内的分布状态。实际监测过程中发现,工厂化种植区域环境中的空气湿度分布与该室内环境的空气流温度、速度、方向以及植物与进风口之间相对位置等存在关联。在实际植物工厂的种植空间中,植株所处的位置的空气温湿度环境的分布情况主要是取决于该种植空间中的空气流温度、速度和方向。优选地,通过利用神经网络模型对温湿度分布与该区域气流特性之间的关系进行模拟和验证,从而获取方便对种植空间内植株生长环境进行可控调节的温湿度分布与气流特性之间的关联关系,通过改变设施环境内空气流温度、速度和方向,就可控制空间内温度分布,从而获得适合植株生长的最佳空气、温度等环境因子的分布。
针对现有技术之不足,本发明的技术方案提供的是一种远程操控的植物照护装置,至少包括能够在控制单元的控制下在植物工厂内完成巡检工作的巡检护理模块,所述巡检护理模块上至少安装有图像采集单元、环境检测单元以及调节组件,其中,所述调节组件按照能够驱动所述图像采集单元绕栽培架上的特定植株进行多个工作位置变换的方式完成多角度植株图像的采集;所述调节组件还能够以模拟叶柄对叶片进行支撑的方式将所述环境检测单元置于特定植株的叶片区域,所述环境检测单元是按照能够模拟叶片结构和形状的方式进行构建的,使其能够获取到与叶片所处的环境相同的微环境参数。其优势在于,能够在巡检过程中采集植株图像,并通过图像对比的方式完成图像中生长疑似异常植株的筛选,并能够在进一步的二次巡检过程中获取标记的可疑植株的多拍摄角度的植株图像和该植株叶片的微环境参数进行分析和进一步对比,从而验证疑似生长异常植株是否确实为不良植株,并能够利用植株图像和微环境参数与预先存储的对应于植株该生长阶段的微环境标准数据样本库和病症样本数据库中的数据进行对比的方式分析植株表征异常的原由。
根据一种优选的实施方式,在所述控制单元获取到远程操控指令后,其能够控制巡检护理模块沿设定的巡检路径对所述栽培架上的植株进行第一次巡检操作,所述第一次巡检操作是指所述控制单元控制所述巡检护理模块进行变速移动过程中通过所述图像采集单元获取若干植株在同一拍摄角度的图像。
根据一种优选的实施方式,所述图像采集单元利用处理模块对第一次巡检过程中采集的植株图像进行对比处理;所述处理模块能够对若干植株图像中植株生长状况异常的进行标记,并依据图像获取顺序和巡检路径计算疑似生长异常植株在所述栽培架上的坐标。
根据一种优选的实施方式,所述处理模块进行图像对比处理后输出的图像结果中的疑似生长异常植株即是所述特定植株;所述图像采集单元进行多角度植株图像的采集和所述环境检测单元进行叶片微环境参数的获取均是在所述处理模块输出疑似生长异常植株图像信息后受所述控制单元的控制而完成的。其优势在于,通过对植株进行多角度清晰图像的获取,能够更好地采集到植株存在病变的叶片或/和茎秆,从而方便后期根据样本库数据对病症进行有效地识别。此外能够模拟叶片状态的监测模块能够采集到准确的叶片所处微环境的参数数据,从而有效地判断出植株的异常是否是环境因子的异常造成的,进而能够根据数据量异常的环境因子,找出其对应的植物工厂模块,方便针对性地对植物工厂模块进行工作状态展开检测。
根据一种优选的实施方式,在所述处理模块输出对比结果的情况下,所述控制单元驱动巡检护理模块沿相同的巡检路径进行变速运动,使得其能够控制所述巡检护理模块停止于设定坐标位置处,从而利用所述图像采集单元和环境检测单元获取能够用于标记的可疑植株二次验证的双重异类验证数据。
根据一种优选的实施方式,所述双重异类验证数据包括所述图像采集单元在进行多个工作位置变换过程中获取的同一标记植株的若干个不同图像和所述环境检测单元以模拟叶片形状、结构以及所处位置的方式获取的叶片微环境参数。
根据一种优选的实施方式,所述图像采集单元在二次验证巡检过程中获取的植株图像和所述环境检测单元获取的叶片微环境参数能够传输至数据分析单元;所述数据分析单元利用接收的植株信息完成植株生长异常情况的验证工作后,其还能够利用植株图像和叶片微环境参数对植株生产异常原因进行分析。
根据一种优选的实施方式,所述调节组件至少包括能够带动所述图像采集单元进行工作位置变换的第一机械臂和能够按照模拟叶柄对叶片进行定位支撑的方式将所述环境检测单元置于标记植株叶片所处的空间区域内的第二机械臂。
本申请还提供一种远程操控的植物照护方法,至少包括以下步骤:
控制单元根据工作人员向植物工厂控制中枢发出的巡检指令而驱动巡检护理模块带动图像采集单元进行第一次巡检操作;处理模块对第一次巡检过程中采集的植株图像进行处理,并对疑似生长异常的植株图像进行标记;所述控制单元控制巡检护理模块以变速运动的方式完成二次验证巡检工作;所述图像采集单元和环境检测单元分别在二次验证巡检过程中完成多角度标记植株图像采集和叶片微环境参数采集;所述图像采集单元和环境检测单元获取的用于对已标记的可疑植株进行验证的植株信息输送至数据分析单元进行验证和异常症状分析。其优势在于,能够在巡检过程中采集植株图像,并通过图像对比的方式完成图像中生长疑似异常植株的筛选,并能够在进一步的二次巡检过程中获取标记的可疑植株的多拍摄角度的植株图像和该植株叶片的微环境参数进行分析和进一步对比,从而验证疑似生长异常植株是否确实为不良植株,并能够利用植株图像和微环境参数与预先存储的对应于植株该生长阶段的微环境标准数据样本库和病症样本数据库中的数据进行对比的方式分析植株表征异常的原由。
根据一种优选的实施方式,所述图像采集单元和环境检测单元是通过调节单元完成其在标记植株信息采集过程中的工作位置变换。
附图说明
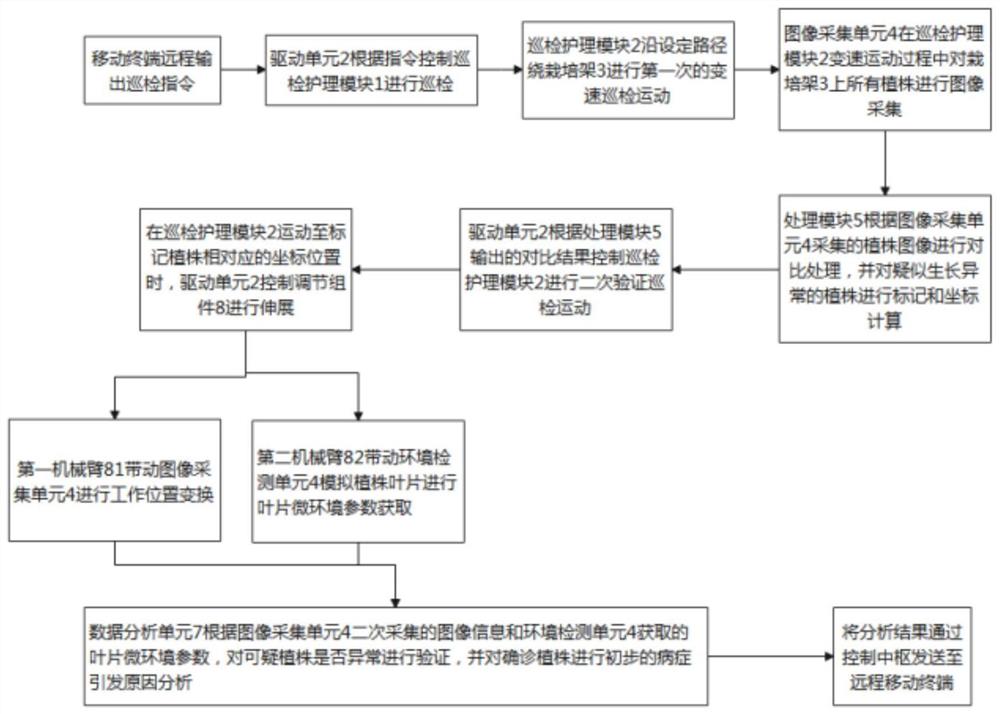
图1是本发明的一种远程操控的植物照护装置及方法的优选实施例的工作流程示意图;
图2是本发明的一种远程操控的植物照护装置及方法的平面示意图。
附图标记列表
1:巡检护理模块;2:控制单元;3:栽培架;4:图像采集单元;5:处理模块;6:环境检测单元;7:数据分析单元;8:调节组件;81:第一机械臂;82:第二机械臂。
具体实施方式
下面结合附图进行详细说明。
实施例1
本申请提供一种远程操控的植物照护装置,其包括能够巡检护理模块1、能够控制巡检护理模块1在种植空间内沿固定路径绕栽培架3定向移动的控制单元2以及设置在巡检护理模块1上的图像采集单元4、处理模块5、环境检测单元6、数据分析单元7和调节组件8。
根据图1示出的一种具体的实施方式,巡检护理模块1能够受控制单元2的控制而在种植空间内进行巡检工作,且控制单元2能够通过控制巡检护理模块1在行进路线的任意点位时的行进速度,使得巡检护理模块1上设置的图像采集单元4和环境检测单元6均能够采集到足够准确地植株生长数据。图像采集单元4和环境检测单元6通过调节组件8支撑在巡检护理模块1上,且图像采集单元4和环境检测单元6能够在调节组件8的带动下相对巡检护理模块1发生工作位置的改变,从而能够以不同的工作位置获取植株的图像和微环境参数。在工作人员需要对种植空间中植株的生长状况进行信息采集时,通过移动终端向植物工厂的控制中枢发送巡检指令,控制中枢进一步通过控制单元2驱动巡检护理模块1进行运动并完成相关的指令任务。巡检护理模块1在受控制单元2的驱动进行第一次巡检时,控制单元2控制图像采集单元4以定向依次采集的方式获取种植空间内所有植株的图像数据。处理模块5接收图像采集单元4第一次巡检过程中采集的所有植株图像数据后,处理模块5对图像进行对比处理并对栽培架上生长状况疑似存在问题的植株图像进行区分和标记,处理模块5还能够对植株图像根据采集时间进行排序和种植位置信息整理,从而将采集到的图像数据以植株在栽培架3上的布置情况进行空间坐标排布,方便控制单元2能够获取被标记的可疑植株在栽培架3上具体坐标位置。控制单元2根据处理模块5输出的疑似植株结果而控制巡检护理模块1进行二次巡检运动,从而进一步控制图像采集单元4和环境检测单元6完成对标记的可疑植株进行新一轮的验证信息采集操作。在二次验证信息采集过程中,图像采集单元4能够在调节组件8带动下绕标记植株进行工作位置转换,从而从多个拍摄角度获取相对完整的用于验证植株异常生长状况是否存在和能够用于对异常症状进行对比分析的植株图像。环境检测单元6能够在调节组件8的带动下以模拟叶片光合作用的发生位置的方式获取靠近叶片的微环境参数信息,从而数据分析单元7根据微环境参数与种植空间设置标准参数进行比较的方式分析疑似生长异常植株叶片所处的微环境是否存在环境因子的含量错误或辅助该植株生长的硬件元件发生损坏。例如,植株上方灯光模块损坏和工作异常、培养液液量不足或调配失误造成某种营养缺失、植株位置远离进风口和出风口而导致其微环境空气滞留和温度、湿度异常等。数据分析单元7能够将最终的分析结果通过控制中枢传输给移动终端,方便工作人员远程进行植株生长状况的查看。且控制中枢还能够根据叶片微环境的分析结果对该生长异常植株的微环境进行调节或改变该生长异常植株在栽培架上的安置位置,使得植株叶片重新处于一个良好的生长微环境中。
优选地,巡检护理模块1框架可以设置为龙门形结构,使得其可以跨越营养液槽行走,且巡检护理模块1的龙门框架两侧还设置有能够将夹取栽培板的顶升结构,从而能够将栽培板放入到指定营养液槽中。优选地,巡检护理模块1还能够根据叶片获取到的环境参数和图像分析结果,控制能够与顶升结构协同工作的机械手完成种植有异常生长植株的栽培板的转移或位置调节。
优选地,环境检测单元6按照能够模拟植物生长在过程中叶片表面实际接触环境的方式模拟叶片形状进行设置。优选地,环境检测单元6能够对温度、湿度、光照、营养、CO
优选地,呈叶片状且能够悬置于植物叶片对应位置的环境检测单元6还能够及时有效地获取叶片环境的改变,例如在进行植物的微喷降温时,只需要检测到需要降温的植物种植空间中最靠近植物叶片表面的区域温度发生下降即可认定为完成植物生长环境参数的调节,相对于现有技术,不需要对影响该株植物或该片区植物生长的整个植物工厂种植区进行降温处理,从而大大缩减了植物工厂内植物生长环境调节的效率和能耗,使得植物工厂的控制中枢或控制单元2能够根据环境检测单元6反馈的参量数据以环境微控调节的方式改变与环境检测单元6采集参量对应的植物的生长环境。
如图2所示,调节组件8的移动端安装有能够获取植株图像的图像采集单元4。图像采集单元4能够跟随巡检护理模块1绕栽培架3进行固定轨迹的移动,从而获取整个栽培架3上所有植株的图像。优选地,调节组件8还能够调整图像采集单元4与巡检护理模块1之间的相对位置,使得在巡检护理模块停止前行时,调节组件8能够改变图像采集单元4与待拍摄植株之间的位置,从而利用图像采集单元4获取植株不同角度的图像数据。优选地,图像采集单元4在第一次跟随巡检护理模块1进行运行时是始终保持与巡检护理模块1之间相对固定的工作位置。当处理模块5接收到图像采集单元4在一定时间内拍摄到的整个栽培架3上所有同期同种类培育的植株图像数据后,对所有植株图像进行对比,并将存在叶片可能存在萎蔫、倒伏、退绿或黄化等异常状况的植株图像进行标记。
优选地,巡检护理模块1带动图像采集单元4绕相同活动轨迹进行第二次运行。当巡检护理模块1移动至标记图像对应的植株位置时,巡检护理模块1暂停运动,调节组件8带动图像采集单元4进行工作位置的变换,使得图像采集单元4能够对被标记的疑似异常植株进行多角度图像获取,方便对该植株存在的异常情况进行二次确认。
优选地,在所述巡检护理模块进行第二次运行时,调节组件8还能够改变环境检测单元6的工作位置,使得图像采集单元4进行植株多角度图像获取的同时,环境检测单元6能够移动至该植株的叶片区域,从而对植株叶片的微环境参数数据进行获取。优选地,图像采集单元4进行二次采集获取的关于可疑植株的高清晰度、多角度的图像能够与环境检测单元6获取叶片微环境参数数据发送至数据分析单元7。优选地,数据分析单元7能够通过图像灰度处理、叶片轮廓形状对比等方式分析图像采集单元4采集的植株图像中叶片是否存在萎蔫、倒伏、退绿或黄化等异常。优选地,数据分析单元7还能够根据环境检测单元6获取的植株叶片微环境参数与种植空间预设的环境参数之间的差异,从而向植物工厂控制中枢发送分析结果,使得控制中枢能够控制栽培架3上的灯光模块、加湿模块和吹风模块改变异常植株的叶片区域微环境的光照强度以及微环境湿度、风力大小和风向,使得该植株的微环境得以调节,更利于植株叶片进行生长和光合作用。
实施例2
优选地,处理模块5和数据分析单元7对植株图像的处理分析还可以通过对照片中植株茎秆的上中下段叶片颜色进行色度识别和植株外轮廓的尺寸大小对比。当存在某一株或少量植株的外轮廓明显小于其余图像中的植株时,可以对该部分植株的分布情况进行归纳、整理,从而判断是否是同一栽培板未有效完成栽培预清洗,而导致栽培板本身存在病害真菌;也可能是栽培架3为该区域植株进行供养的营养液存在配比错误和某种营养缺失造成生长缓慢;还可能是某一供电支路存在电压异常或光照异常,导致灯光模块未能给异常生长区域的植株提供有效地光照。优选地,光照异常可以是照明灯损坏、照明灯发光颜色不是最佳生长光、光线亮度过高或过低等。优选地,植株的生长差异还可能是栽培架3与通风口、出风口位置以及栽培板在栽培架3上的层级高度等导致的。
适合的环境是生物生存与发展的基础。如植物的光合作用,需要适宜的温度、湿度、光照、水分及CO
优选地,环境检测单元6构造的模拟叶片是模拟植物的气孔结构及在离体情况下对水分代谢光合作用温度条件等要求,采用高度密集电路、特殊材料及传感技术开发而成的人造叶片,它能感知植物叶片微域环境的各项因子:温度、水分蒸发系数、叶片的水膜分布、基质水分、空气湿度、基质湿度、矿质营养的离子浓度((EC值)、环境光照等环境参数。数据分析单元7通过模拟叶片反馈的微环境参数进行分析处理,并将关于生长异常植株的分析结果上传至控制中枢,控制中枢根据分析结果再控制执行机构进行调节植株生长环境的外围设备的启停,以调控外部环境。
控制单元2对环境检测单元6和第二机械臂82的控制采用二级控制结构:第一级为直接控制级即单片机智能分控器,由AT89C51单片机组成,负责模拟叶片结构的环境检测单元6完成对温度、湿度、光照和C0
优选地,环境检测单元6还包括能够对植株进行呼吸作用时产生的CO
实施例3
本实施例是对实施例1的进一步改进,重复的内容不再赘述。
优选地,图像采集单元4通过调节组件8安装在巡检护理模块1上。调节组件8能够在控制单元2的控制下改变图像采集单元4的工作位置。在处理模块5完成对可疑植株图像的初次标记时,处理模块5能够将该植株在种植架上的位置坐标和对应的驱动指令发送至巡检护理模块1和控制单元2。巡检护理模块1接收处理模块5发送的植株位置坐标后能够携带图像采集单元4进行二次同路径运动,使得图像采集单元4能够对非标记植株进行新一轮的常规图像采集并发送至处理模块5进行对比。当巡检护理模块1移动至可疑植株对应的坐标位置时暂停移动,控制单元2根据预设的驱动指令控制调节组件8绕固定的轨迹进行活动,使得调节组件8上安装的图像采集单元4能够对生长状态可疑的植株进行多角度图像采集,同时调节组件8还能够带动环境检测单元6进行位置变动,使得环境检测单元6能够模拟叶片所处的生长形态对叶片微环境的环境参数数据进行获取。
优选地,环境检测单元6能够在受控制单元2控制的调节组件8驱动而移动至栽培架3上的不同位置,使得环境检测单元6能够模拟植株叶片的真实生长位置对异常生长植株的同区域的微环境进行环境参数采集。控制单元2可以根据处理模块5标记出的存在生长异常情况植株的位置控制调节组件8带动模拟叶片形状的环境检测单元6移动至该植株中段的叶片区域内,使得环境检测单元6能够以模仿叶片形态的方式对该叶片区域微环境中的环境参数进行采集。优选地,环境检测单元6能够在调节组件8的带动下相对于巡检护理模块进行多角度的转动和平移,使得环境检测单元6能够绕植株进行位置调节。
优选地,处理模块5识别与区分包括对图像中植株叶片是否存在明显的萎蔫、倒伏以及所有图像之间的植株尺寸大小、颜色等进行相互之间的对比。优选地,处理模块5对图像采集单元4第一次采集的植株图像进行对比处理过程中能够按照巡检护理模块1预先规划的行进路线对植株图像进行排序,从而能够在对可疑植株进行标记的同时还能够对该植株图像进行坐标补充,使得控制单元2能够获取到可疑植株在栽培架3上的坐标位置,并控制巡检护理模块1沿预设路径进行移动时能够在控制单元2的控制下停靠在行进轨道与可疑植株对应的位置处。
优选地,数据分析单元7能够以预先输入的方式设置关于表征植株生长状态的多种参数的标准样本数据库。例如:植株不同时期的平均高度以及对应每一个生长周期内植株高度的阈值范围、单棵植株俯视投影时叶片形成外轮廓的投影面积大小、植株杆径在不同时期的标准尺寸及其阈值范围、植株中段叶片的颜色及大小以及植株叶片是否存在明显的萎蔫、倒伏等。优选地,数据分析单元7还预先存储有适宜于植株在各阶段保持最佳生长状态的叶片微环境参数的样本数据库。优选地,该样本数据库至少包括影响叶片光合作用的温度、湿度、光照、水分及CO
优选地,控制单元2能够根据植物工厂控制中枢定时发出的巡逻指令或人为主动发出的驱动指令而控制巡检护理模块1在栽培架3之间进行对种植物巡检和观察。在不存在异常植株时,控制单元2能够按照设定的时间周期不断地驱动巡检护理模块1完成栽培架3种植物的巡检操作。当控制单元2控制巡检护理模块1第一次发现疑似异常植株时,控制单元2能够立即驱动巡检护理模块1进行第二次的巡检。优选地,控制单元2在第二次巡检过程中还能够控制巡检护理模块1在特定轨道位置停止,并驱动调节组件8带动图像采集单元4和环境检测单元6进行不同的工作位置变动,从而获取到能够对初期结果进行双重验证的植株图像与微环境参数。
优选地,当数据分析单元7对二次采集的植株图像与其存储同一生长时期的标准数据存在明显差异而确诊该植株存在生长异常时,数据分析单元7能够根据环境检测单元6采集到的叶片微环境参数与标准参量之间的差异来判断是否为叶片所处环境异常导致的退绿、黄化、萎蔫以及倒伏等。在数据分析单元7对二次采集的植株图像进行图像处理发现植株叶片存在白灰沉积、叶片发霉、白点等明显发病异常时,数据分析单元7还能够将该植株图片上传至植物工厂的控制中枢所在的后端处理平台,使得工作人员能够对病症进行人工分析判定或处理平台根据现有的网络资料或植株病例记录档案对植株图像中展示出的病症进行识别,从而根据对应病症的现有处理方案驱动巡检护理模块1或栽培架3上的灯光模块、加湿模块和吹风模块对植株进行转移或叶片环境处理。
优选地,调节组件8包括能够带动图像采集单元4一定区域内进行多工作位置变换的第一机械臂81和能够根据植株中段茎秆上叶片实际的工作位置以及展开方向等而将呈叶片状的环境检测单元6也支撑在同一叶片区域内进行微环境参数采集的第二机械臂82。优选地,第一机械臂81和第二机械臂82还能够收缩容纳于巡检护理模块1上的容纳腔中,从而在巡检护理模块1进行常规巡检时,环境检测单元6保持关闭状态。优选地,第一机械臂81能够将图像采集单元4支撑在巡检护理模块上,使得巡检护理模块沿预设轨道进行运动时,图像采集单元4能够不断地采集位于轨道旁栽培架3上的植株图像。优选地,调节组件8能够根据实际的检测需求进行收纳,能够有效地提高机械臂元件的使用寿命和耐磨损度,避免尝试暴露时元件的氧化以及受外界高湿度环境的侵蚀以及植株异常生长时病菌的侵蚀。
实施例4
本申请还提供一种远程操控的植物照护方法,其包括以下步骤:
(1)控制单元2根据工作人员向植物工厂控制中枢发出的巡检指令而驱动巡检小车1带动图像采集单元4进行第一次巡检操作,图像采集单元4在巡检小车1沿预设路径进行变速移动过程中有序地采集种植空间内所有植株的图像;
(2)处理模块5接收照护图像采集单元4同一时间段内采集到的同类同期植株的图像并对若干植株图像进行对比,并将疑似存在萎蔫、倒伏、退绿或黄化等异常症状的植株进行标记;
(3)巡检护理模块1根据所述处理模块5的处理结果进行二次巡检,控制单元2控制图像采集单元2和环境检测模块6在二次巡检过程中完成标记植株的图像数据以及叶片微环境参数的采集,并将采集的数据发送到数据分析单元7;
(4)数据分析单元7利用其存储的样本数据与采集图像数据以及叶片微环境参数进行对比,从而判断植株生长异常是受病菌侵害或影响叶片光合作用的微环境参数异常而导致的。
优选地,处理模块5在完成疑似异常植株的区分标记操作后,处理模块5还能够依据巡检护理模块1的行进路径将有序排列的图像数据按照植株实际在栽培架3上的分布情况进行空间排布,从而将标记图像的植株坐标与巡检护理模块1的行进路径进行匹配,并对疑似异常植株位置坐标增加到输出的图像处理结果中。处理模块5输出的带有坐标信息的植株图像能够方便控制单元2根据坐标信息控制巡检护理模块1沿设定路径进行可疑结果验证的第二次巡检过程中能够定点地停止于疑似异常植株图像对应的植株观测位置上,从而控制单元能够通过驱动调节组件8的运动来改变图像采集单元4和环境检测单元6的工作位置,进而获取到能够用于验证第一次巡检结果的验证数据和防病对验证后的异常生长植株的异常原由进行分析植株参数。
优选地,微环境参数异常能够通过对相对应的参数的提供设备或组件进行核查的方式判断是否是相关生长环境构建元件的损坏或异常造成的。
优选地,基于该方法制造的用于对植物工厂的种植空间内植株的照顾和护理的装置具有如下功能:
①参数检测:温室环境测控的基础功能即为环境参数的检测,如温度、湿度、光照度以及CO
②汇总传输:具有无线传输功能,通过建立ZigBee无线传感网络对各检测点(种植空间不同的巡检护理模块)的环境信息进行汇总,实现各节点的信息传递,将环境参数测量值实时反馈给控制中枢,控制中枢也可通过该无线网络实现对所有节点环境信息的查询和汇总。
③实时显示:将检测得到的环境参数进行单点和多点显示,这就需要在各个检测点安装显示屏以显示该点的环境信息,同时需要将多点的环境信息能够汇总后传送到某一处集中显示,以便更好地了解温室整体的环境情况。
④温度评价:针对温室内植株生长发育最重要的因素-温度,建立一个温室温度环境模糊评价系统,对当前温度环境是否适宜植株的生长作出评价,以便进行自动调节或者人工干预来使温度环境达到最适宜植株的生长环境。
⑤远程遥控:通过上位机或手机短信实现环境信息的查询以及远程调控相应的电气设备来自动调节环境因子,对当前环境温度、湿度及光照进行实时控制,创造植物生长最适宜的环境。
⑥节能与安全防范:实现温室环境下通过事先设置的操作策略(通过远程设置)来关闭相关电气设备,以达到节能减排效果。
需要注意的是,上述具体实施例是示例性的,本领域技术人员可以在本发明公开内容的启发下想出各种解决方案,而这些解决方案也都属于本发明的公开范围并落入本发明的保护范围之内。本领域技术人员应该明白,本发明说明书及其附图均为说明性而并非构成对权利要求的限制。本发明的保护范围由权利要求及其等同物限定。在全文中,“优选地”所引导的特征仅为一种可选方式,不应理解为必须设置,故此申请人保留随时放弃或删除相关优选特征之权利。
- 一种远程操控的植物照护装置及方法
- 一种可远程操控的电机组散热装置及其操控方法