一种具有三移动和一转动的四自度并联机器人机构
文献发布时间:2023-06-19 13:51:08
技术领域
本发明涉及一种并联机器人技术领域,尤其是一种三平移一转动四自度并联机器人机构。
背景技术
流水线上的需要分拣的物体往往具有较高的速度在传送带平动,这就需要分拣系统具有能够对目标物体进行快速分拣,抓取。以往此类操作通常由人来完成,这就造成了劳动强度大,以及不同程度污染的相关问题。并联机器人是一种具有闭环结构的先进机器人,它具有刚度大、精度高、承载能力强等优点,可以实现高速高精度的控制任务,能够应用于机械加工,高速分拣等场合。
1985年Clavel发明了Delta机构。该机构采用外转动副驱动和平行四边形支链结构,可实现末端执行器的高速三维平动,DELTA-4型机器人末端执行器的转动自由度是通过在末端动平台上安装一个独立的转动驱力器来实现,这不仅增加了其末端运动惯量,也增加了制造成本。Pierrot等提出了具有四支链、双动平台结构特征的H4并联机构;H4型并联机构的转动输出运动是由其双动平台的相对运动产生的,满足了生产线上对于分拣的应用需求;但该机构的双动平台结构增加了其结构的复杂性,进而导致了复杂的运动学特性,对高速高动态响应的运动特性产生了不利影响,不利于生产效率的发展。同时,H4型并联机构由四个转动副为主驱动,不仅存在奇异位型,且工作空间大小也有限。
发明内容
本发明的目的是克服上述背景技术中的不足,提出一种具有三移动和一转动的四自由度并联机器人机构,该机器人机构可以实现平面内三个移动自由度和垂直于该平面的转动自由度,并且结构简洁、控制灵活、刚度高。
本发明的技术方案是:
一种具有三移动和一转动的四自度并联机器人机构,其特征在于:
该并联机器人机构包括机架、动平台以及连接于机架和动平台之间的两条复合链;每条复合链包括安装在机架上的第一移动副、一端通过第四转动副连接动平台的第三连杆以及并联连接在第一移动副与第三连杆另一端之间的第一分支和第二分支;
所述第一分支包括依次连接在第一移动副与第三连杆另一端之间的第一转动副、第一连杆、第二转动副、第二连杆以及第三转动副;
所述第二分支包括依次连接在第一移动副与第三连杆另一端之间的第五转动副、由第四连杆与第五连杆组成的第二移动副以及第六转动副;
每条复合链中,第一移动副的移动轴线,与第一转动副、第二转动副、第三转动副、第五转动副以及第六转动副的轴线相互平行,并且垂直于第四转动副的转动轴线以及第二移动副的移动轴线;
所述第三转动副与第五转动副共轴布置;
所述两条复合链中的第一移动副轴线相互垂直;
所述第一移动副包括固定于机架上的导轨以及与该导轨滑动配合且同时连接第一转动副与第五转动副的滑块。
所述第二移动副的移动轴线,与第四连杆及第五连杆的轴线相互平行。
所述第一移动副、第二移动副均为驱动副;所述驱动副采用电机驱动的滚珠丝杠机构。
一种具有三移动和一转动的四自度并联机器人机构,其特征在于:
该并联机器人机构包括机架、动平台以及连接于机架和动平台之间的两条复合链;每条复合链包括安装在机架上的圆柱副、一端通过第四转动副连接动平台的第三连杆以及并联连接在圆柱副与第三连杆另一端之间的第三分支和第二分支;
所述第三分支包括依次连接在圆柱副与第三连杆另一端之间的第一连杆、第二转动副、第二连杆以及第三转动副;
所述第二分支包括依次连接在圆柱副与第三连杆另一端之间的第五转动副、由第四连杆与第五连杆组成的第二移动副以及第六转动副;
每条复合链中,圆柱副的移动轴线,与第二转动副、第三转动副、第四转动副以及第五转动副的转动轴线相互平行,并且垂直于第四转动副的转动轴线以及第二移动副的移动轴线;
所述第三转动副与第六转动副共轴布置;
所述两条复合链中圆柱副的移动轴线相互垂直。
所述圆柱副包括固定于机架上的导杆以及该导杆滑动配合和转动配合,且同时固定连接第一连杆与第五转动副的滑套。
所述圆柱副的移动轴线平行于导杆的轴线,所述圆柱副的转动轴线平行于圆柱副的移动轴线。
所述第二移动副的移动轴线,与第四连杆及第五连杆的轴线相互平行。
所述圆柱副、第二移动副均为驱动副;所述驱动副采用电机驱动的滚珠丝杠机构。
本发明的有益效果是:本发明提供的四自度并联机器人机构,可以实现平面内三个移动自由度和垂直于该平面的一个转动自由度,并且结构简洁、控制灵活、刚度高,能够有效应用于机械加工以及物品的高速分拣。
附图说明
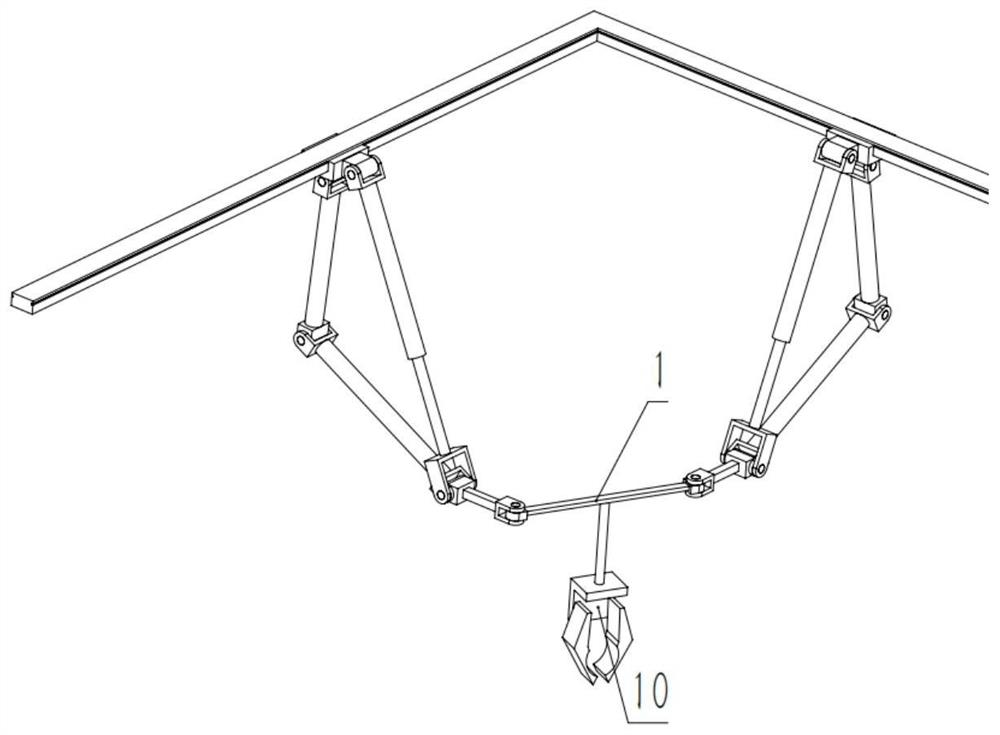
图1为本发明实施例1的立体结构示意图。
图2为本发明实施例2的立体结构示意图。
图3是实施例1中第一分支的立体结构示意图。
图4是实施例1中第二分支的立体结构示意图。
图5是实施例2中第一分支的立体结构示意图。
图中:1、动平台,2、导轨,3、滑块,4、第一连杆,5、第二连杆,6、第三连杆,7、第四连杆,8、第五连杆,9、第六连杆,10、抓取机构,11、第一转动副,12、第二转动副,13、第三转动副,14、第四转动副,15、第五转动副,16、第六转动副,17、导杆、18、滑套。
具体实施方式
以下结合说明书附图,对本发明进一步说明,但发明并不局限于以下实施例。
实施例1:
如图1、图3、图4所示的具有三移动和一转动的四自度并联机器人机构,包括机架(图中省略)、动平台1以及并联连接在机架与动平台1之间的两条复合链;每条复合链中,第一移动副安装在机架上,第三连杆6的一端通过第四转动副14连接动平台,第一移动副与第三连杆另一端之间并联连接着第一分支和第二分支;所述两条复合链中第一移动副的移动轴线相互垂直。
所述第一分支中,第一转动副11、第一连杆4、第二转动副12、第二连杆5以及第三转动副13依次连接在第一移动副与第三连杆的另一端之间;所述第一移动副包括固定于机架上的导轨2以及与该导轨滑动配合的滑块3,滑块3还同时连接第一转动副与第五转动副15。
所述第二分支中,第五转动副15、由第四连杆7与第五连杆8组成的第二移动副(由图可知第四连杆为滑套、第五连杆为与滑套滑动配合的滑杆)以及第六转动副16依次连接在第一移动副与第三连杆的另一端之间。
每条复合链中,第一移动副的移动轴线,与第一转动副、第二转动副、第三转动副、第五转动副以及第六转动副的转动轴线相互平行,并且垂直于第四转动副的转动轴线以及第二移动副的移动轴线;第三转动副与第六转动副共轴布置。
本实施例中,抓取机构10固定在动平台上。
本实施例中,动平台运动时具有平面内三个移动自由度和垂直于该平面的一个转动自由度。并联机构的驱动副为各支链上的移动副,驱动方式可选用电机驱动的滚珠丝杠(图中省略);驱动副运动时,可以带动动平台上的抓取机构作空间运动,完成指定任务(如分拣物品)。
实施例2:
如图2、图5所示的具有三移动和一转动的四自度并联机器人机构,结构基本与实施例1类同,仅有的区别是:由圆柱副取代了实施例1中每条复合链的第一移动副(包括导轨2以及与该导轨滑动配合的滑块3)以及连接该第一移动副的第一转动副;另外,用第三分支取代了实施例1中的第一分支;
所述圆柱副包括导杆17以及与该导杆滑动配合的滑套18;所述导杆固定于机架上,所述滑套固定连接第一连杆以及第五转动副。
所述导杆平行于实施例1中的导轨;所述圆柱副的移动轴线平行于导杆的轴线,所述圆柱副的转动轴线(平行于圆柱副的移动轴线)平行于第二转动副的转动轴线。
所述第三分支与实施例1中的第一分支相比,仅是减少了第一传动副;第三分支中的第一连杆直接固定在圆柱副上,其余连接关系均与实施例1中的第一分支相同。
所述圆柱副、第二移动副均为驱动副;所述驱动副采用电机驱动的滚珠丝杠机构。
- 一种具有三移动和一转动的四自度并联机器人机构
- 一种具有三转动和一移动的四自由度并联机器人机构