原位高速拉伸装置
文献发布时间:2023-06-19 18:25:54
技术领域
本发明涉及实验装备技术领域,尤其涉及一种原位高速拉伸装置。
背景技术
高分子材料因具有比强度高、易加工等优点而广泛应用于人类生活的各个领域。在高分子材料的研究中,结构与性能关系一直是一个极其重要的部分。汽车工业、航空航天等行业的快速发展对高分子材料的性能提出了更高的要求,特别是在服役环境较为苛刻的情况下。高速形变除了发生在高分子加工过程中,一些特殊的服役环境也涉及高速形变。因此,理解高分子材料在宽应变速率、宽温度外场条件下的力学性能和结构演化的关系至关重要。
受限于实验和检测技术的发展,对超高速形变过程中高分子材料的结构演化的研究少之又少,现有的高速拉伸装置对实验设备及场地要求比较高,结构不易改变,不能和其他表征测试装置联用,灵活性较差。
发明内容
鉴于上述问题,本发明提供了一种可以与同步辐射X射线联用进行在线实验的原位高速拉伸装置,并且容易拆卸和安装,该装置可以覆盖宽应变速率、宽温度范围的实验。
为达到上述目的,本发明提供的原位高速拉伸装置,包括:支撑模块,包括支撑组件和辅助组件,分别起到支撑和辅助作用,支撑组件上固定有用于放置实验样品的样品腔,支撑组件上设有控制柜;拉伸模块,可拆卸地设于支撑组件上,拉伸模块包括传动组件和驱动组件,用于进行同步联动以拉伸实验样品,驱动组件包括四个伺服电机,伺服电机设于支撑组件的两侧,伺服电机固定连接传动组件;温度模块,包括加热组件和制冷组件,分别用于对样品腔进行加热和制冷,加热组件可拆卸地设于支撑组件上一侧,制冷组件通过气管与样品腔连接;力学采集模块,包括扭矩采集组件,用于检测拉伸过程中材料的应力变化,扭矩采集组件可拆卸地设于支撑组件上;控制模块,设于支撑组件的控制柜中,控制模块包括驱动控制组件和温度控制组件,驱动控制组件与驱动组件电性连接,控制伺服电机的转动;温度控制组件分别与加热组件和制冷组件电性连接,用于控制样品腔内的温度。
根据本发明的实施例,驱动控制组件包括PCB印刷电路板和电源开关,温度控制组件包括温控表、变频器和继电器;其中,驱动组件与PCB印刷电路板电性连接,加热组件和制冷组件均与温控表电性连接。
根据本发明的实施例,扭矩采集组件包括四个扭矩传感器、四个放大器和NI采集卡,其中:扭矩传感器设于支撑组件上且通过传动组件连接至伺服电机,放大器和NI采集卡设于支撑组件的控制柜内。
根据本发明的实施例,支撑组件还包括底板、压辊底板、导轨、拉辊电机座、压辊电机座、扭矩传感器安装座、扭矩传感器压板和把手,其中:底板上开设有两条相对设置的导轨,压辊底板跨接在两条导轨上;底板的两端均竖向固定有拉辊电机座,两个拉辊电机座上均固定有伺服电机;压辊底板上竖向固定有压辊电机座,用于固定伺服电机;扭矩传感器设于扭矩传感器安装座上,扭矩传感器顶部固定有扭矩传感器压板;每个拉辊电机座顶面固定有把手。
根据本发明的实施例,辅助组件包括航空接头、气缸和两个温度探头,其中:航空接头固定在底板上,底板上固定有两个可调控气压的气缸,用于控制压辊底板通过导轨在底板上移动;温度探头安装于样品腔两侧,温度探头与温度控制组件电性连接。
根据本发明的实施例,传动组件包括联轴器、连接轴、收卷辊、拉辊和压辊,其中:样品腔内相互平行且上下两层各自设置有收卷辊、拉辊和压辊,位于同一层的拉辊和压辊相互摩擦,以拉伸实验样品,其中,通过改变两个气缸的气压来控制两个压辊对实验样品与拉辊切线的压力,以改变拉辊与压辊间的摩擦力;收卷辊用于收卷拉伸后的实验样品;伺服电机依次通过联轴器、连接轴连接至扭矩传感器的一端,扭矩传感器的另一端连接至样品腔内的拉辊或者压辊。
根据本发明的实施例,拉辊和压辊采用分离式设计,在拉辊的中间开设有样品固定槽,实验样品固定于样品固定槽内;或者,实验样品固定于收卷辊上,收卷辊为弹簧辊,用于收卷在拉伸过程中被拉出有效拉伸长度外的样品部分。
根据本发明的实施例,加热组件包括加热枪、空压机和进气管,其中:空压机通过气管与加热枪连接,加热枪通过进气管与样品腔连接,加热枪和进气管均设于支撑组件上。
根据本发明的实施例,加热组件还包括:保温板,设置于样品腔内的六个面;风道盒,设置于样品腔侧壁,保温板和风道盒用于控制样品腔内温度的均匀稳定。
根据本发明的实施例,制冷组件包括液氮罐、氮气瓶、球型阀、圆形气盒和节流阀,其中:液氮罐通过气管依次与氮气瓶和球型阀连接,球型阀电性连接至温度控制组件的温控表,球型阀还连接至样品腔上的节流阀,以将冷氮气导入到样品腔内;样品腔前后设有入射光窗口和出射光窗口,入射光窗口和出射光窗口各自安装有圆形气盒。
根据本发明的实施例,辅助组件还包括散热风扇,散热风扇间隔置于底板的两端;和/或,支撑组件还包括多个橡胶底脚,多个橡胶底脚设于底板下端面。
与现有技术相比,本发明提供的原位高速拉伸装置,至少具有以下有益效果:
(1)本发明可拆卸地在支撑模块上设置拉伸模块、温度模块及力学采集模块,满足对薄膜在不同实验环境下的测试需要,同时各模块可拆卸。该装置灵活性强,适用性好,可以满足多样的测试需求;
(2)本发明提供的原位高速拉伸装置,可以与同步辐射X射线联用进行在线实验,并且容易拆卸和安装,该装置可以覆盖宽应变速率、宽温度范围的实验;
(3)本发明提供的原位高速拉伸装置,还可以进行宽应变速率(10
附图说明
通过以下参照附图对本发明实施例的描述,本发明的上述以及其他目的、特征和优点将更为清楚,在附图中:
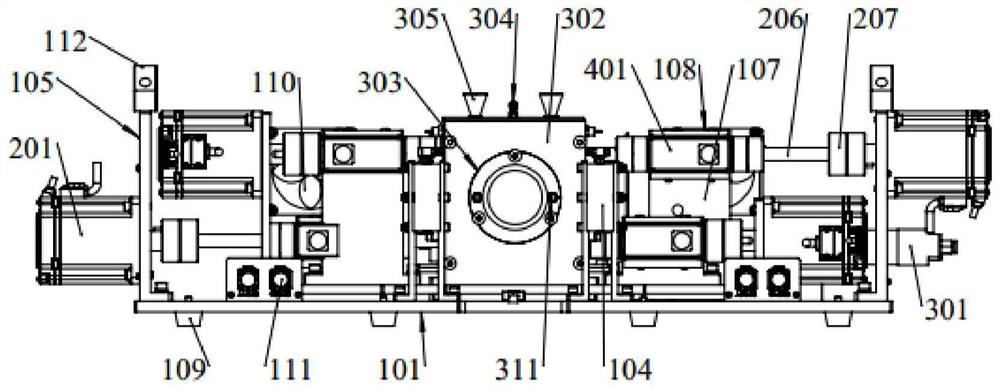
图1示意性示出了根据本发明实施例的原位高速拉伸装置在一角度下的整体结构图;
图2示意性示出了根据本发明实施例的原位高速拉伸装置在另一角度下的整体结构图;
图3示意性示出了根据本发明实施例的原位高速拉伸装置在显示样品腔内部的整体结构图;
图4示意性示出了根据本发明实施例的样品腔的结构图;
图5示意性示出了根据本发明实施例的导轨的布置图;
图6示意性示出了根据本发明实施例的分离式拉辊的结构图;
图7示意性示出了根据本发明实施例的加热组件的布置图;
图8示意性示出了根据本发明实施例的样品腔内风道盒的结构图;
图9示意性示出了根据本发明实施例的窗口和圆形气盒的结构图。
附图标记说明:
101-底板;102-压辊底板;103-导轨;104-气缸;105-拉辊电机座;106-压辊电机座;107-扭矩传感器安装座;108-扭矩传感器压板;109-橡胶底脚;110-散热风扇;111-航空接头;112-把手;201-伺服电机;
202-压辊;203-拉辊;204-上样辊压块;205-收卷辊;206-连接轴;207-联轴器;301-加热枪;302-样品腔;303-圆形气盒;304-节流阀;305-顶盖提手;306-风道盒;307-温度探头;308-进气管;309-保温板;310-盖面板;311-快插接头;312-出口薄膜;401-扭矩传感器。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本发明进一步详细说明。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在此使用的术语仅仅是为了描述具体实施例,而并非意在限制本发明。在此使用的术语“包括”、“包含”等表明了所述特征、步骤、操作和/或部件的存在,但是并不排除存在或添加一个或多个其他特征、步骤、操作或部件。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或可以互相通讯;可以是直接连接,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在此使用的所有术语(包括技术和科学术语)具有本领域技术人员通常所理解的含义,除非另外定义。应注意,这里使用的术语应解释为具有与本说明书的上下文相一致的含义,而不应以理想化或过于刻板的方式来解释。
如图1-图3所示,本发明实施例提供了一种原位高速拉伸装置,包括支撑模块、拉伸模块、温度模块、力学采集模块和控制模块。
其中,支撑模块包括支撑组件和辅助组件,分别起到支撑和辅助作用,支撑组件上固定有用于放置实验样品的样品腔302,支撑组件上设有控制柜。
拉伸模块可拆卸地设于支撑组件上,拉伸模块包括传动组件和驱动组件,用于进行同步联动以拉伸实验样品,驱动组件包括四个伺服电机201,伺服电机201设于支撑组件的两侧,伺服电机201固定连接传动组件。
温度模块包括加热组件和制冷组件,分别用于对样品腔302进行加热和制冷,加热组件可拆卸地设于支撑组件上一侧,制冷组件通过气管与样品腔302连接。
力学采集模块包括扭矩采集组件,用于检测拉伸过程中材料的应力变化,扭矩采集组件可拆卸地设于支撑组件上。
控制模块设于支撑组件的控制柜中,控制模块包括驱动控制组件和温度控制组件,驱动控制组件与驱动组件电性连接,控制伺服电机201的转动以及拉辊203、压辊202在样品腔302内的运动。温度控制组件分别与加热组件和制冷组件电性连接,用于控制样品腔302内的温度,例如可以通过加热/制冷至预设温度并保持,以满足对薄膜在预设温度环境下的进行拉伸原位表征实验的需求。
优选地,驱动控制组件包括PCB(Printed Circuit Board)印刷电路板和电源开关,温度控制组件包括温控表、变频器和继电器。其中,驱动组件与PCB印刷电路板电性连接,加热组件和制冷组件均与温控表电性连接。
通过上述实施例,本发明提供的原位高速拉伸装置采用PCB印刷电路板进行驱动控制,该PCB印刷电路板内含现场可编程门阵列(FPGA)芯片及小型MCU(MicrocontrollerUnit)控制单元,FPGA采用verilog语言进行编程,驱动四个伺服电机201实现同步。并且,用户控制实现的上位机是一台计算机,计算机的操作界面是由LABVIEW编写,MCU控制单元通过与上位机以及FPGA之间通信,实现上位机的读写与FPGA控制命令的写入。温度控制组件可根据上位机给定温度命令实现自动调节工作状态,从而达到精确控温的目的。温度控制组件还可以通过MODBUS TCP协议与上位机建立通信,实现温度的读取与写入。
本发明实施例中,力学采集模块包括扭矩采集组件,该扭矩采集组件具体可以包括四个扭矩传感器401、四个放大器和NI采集卡。其中,扭矩传感器401设于支撑组件上且通过传动组件连接至伺服电机201,放大器和NI采集卡设于支撑组件的控制柜内。在拉伸过程中获取材料的力学响应,扭矩传感器401能够将扭力的物理变化转换成精准的电信号,实现扭矩的动态测量,利用NI采集卡将检测到的数据传送给上位机-计算机,进而可以推导出拉力、应力的变化。
请继续参阅图1-图3,本发明实施例中,支撑模块包括支撑组件和辅助组件。该支撑组件还可以包括底板101、压辊底板102、导轨103、拉辊电机座105、压辊电机座106、扭矩传感器安装座107、扭矩传感器压板108和把手112。其中,底板101上开设有两条相对设置的导轨103,压辊底板102跨接在两条导轨103上。底板101的两端均竖向固定有拉辊电机座105,两个拉辊电机座105上均固定有伺服电机201。压辊底板102上竖向固定有压辊电机座106,用于固定伺服电机201。扭矩传感器401设于扭矩传感器安装座107上,扭矩传感器401顶部固定有扭矩传感器压板108。另外,每个拉辊电机座105顶面固定有把手112。
本发明实施例中,辅助组件还包括航空接头111、气缸104和两个温度探头307。其中,航空接头111固定在底板101上,底板101上固定有两个可调控气压的气缸104,用于控制压辊底板102通过导轨103在底板101上移动。温度探头307安装于样品腔302两侧,温度探头307与温度控制组件电性连接。
通过上述实施例,拉伸模块、温度模块和力学采集模块均设置在支撑组件上。此种结构的设置在满足各部件安装、配合要求的同时,还能够使得整个装置的结构得到最大程度的简化。
本发明实施例中,拉伸模块包括传动组件和驱动组件,其中,驱动组件包括伺服电机201。请参阅图4,传动组件具体可以包括联轴器207、连接轴206、收卷辊205、拉辊203、压辊202。其中,样品腔302内相互平行且上下两层各自设置有收卷辊205、拉辊203和压辊202,位于同一层的拉辊203和压辊202相互摩擦,以拉伸实验样品,通过改变两个气缸104的气压来控制两个压辊202对实验样品与拉辊203切线的压力,以改变拉辊203与压辊202间的摩擦力。收卷辊205用于收卷拉伸后的实验样品。
伺服电机201依次通过联轴器207、连接轴206连接至扭矩传感器401的一端,扭矩传感器401的另一端连接至样品腔302内的拉辊203或者压辊202。
可以理解的是,在样品腔302中的主要拉伸机构包含四个辊,分别为两个拉辊203和两个压辊202。相应地,伺服电机201和扭矩传感器401的数量也为四个。四个伺服电机201在控制模块发出指令后同步联动,带动上下拉辊203、压辊202进行反向旋转运动拉伸实验样品,在拉伸过程中,扭矩传感器401跟踪拉力的变化,表征实验样品的流变学信息。
如图5所示,在拉伸实验样品前,气缸104可以控制压辊底板102通过导轨103在底板101上进行移动,通过改变气缸104的气压控制两个压辊202对实验样品与拉辊203切线的压力,来增大拉辊203与压辊202间的摩擦力。
也就是说,利用两个可调控气压的气缸104控制压辊202对实验样品与拉辊切线施加一定的压力,压辊202固定连接压辊底板102,压辊底板102可以通过导轨103在底板101上进行移动,通过改变气缸104的气压来改变拉辊203与压辊202间的摩擦力。
需要说明的是,对于这种辊拉结构,其有效拉伸长度是恒定的,即上下拉辊竖直切线之间的距离。辊拉结构的优势在于实验样品在拉伸过程中始终处于恒定的应变速率状态。所施加的应变速率
式中,n为转速,R为拉辊半径,l
进一步地,利用扭矩传感器401获取的实时扭矩数据,可以推导出Hencky应变ε和工程应力σ,相应的计算公式为:
式中,t为对应应变速率下的拉伸时间,M为扭矩传感器采集的拉伸过程中的扭矩值,W为实验样品的宽度,H为实验样品的厚度。
本发明实施例中,实验样品的固定方式有两种方式。
第一种为实验样品固定在拉辊203上,拉辊为分离式结构。如图6所示,拉辊203和压辊202采用分离式设计,在拉辊203的中间开设有样品固定槽,实验样品固定于样品固定槽内,放置实验样品后拉辊203仍旧保持近似圆柱形。具体而言,在拉辊203夹片内部设计了样品固定槽,防止实验样品在拉伸过程中出现左右移动,实验样品和上样辊夹片204通过螺钉固定在拉辊203上,可以保证夹上实验样品后,拉辊203仍旧保持近似圆柱形。
第二种为实验样品固定于收卷辊205上,收卷辊205为弹簧辊,可以收卷在拉伸过程中被拉出有效拉伸长度外的样品部分。
可以理解的是,拉辊203以及压辊202表面也需要进行一定的处理,例如滚花处理,如图6所示,来增大辊间的摩擦力,保证实验样品在拉伸过程中不打滑。
如图7所示,本发明实施例中,温度模块包括加热组件和制冷组件。该加热组件可以包括加热枪301、空压机和进气管308。其中,空压机通过气管与加热枪301连接,加热枪301通过进气管308与样品腔302连接,加热枪301和进气管308均设于支撑组件上。
可选地,加热组件还包括保温板309和风道盒306,其中,保温板309设置于样品腔302内的六个面,风道盒306设置于样品腔302侧壁,保温板309和风道盒306用于控制样品腔302内温度的均匀稳定。风道盒306可以均匀分布在样品腔内,由此加热组件提供的热风以及制冷组件提供的冷氮气可以均匀的渗透到样品腔的各个位置。保温板309可以保证长时间样品腔302内的温度稳定。
结合图7-图8所示,对于高温的控制,以加热枪301为热源,利用空压机施加压力通过进气管308将热风导入到样品腔302内左右的风道盒306。接着,热风从风道盒306上的网孔板均匀渗透到样品腔302的各个位置。
进一步地,样品腔302内还安装有两个热电阻式的温度探头307,该温度探头307电性连接温度控制组件的温控表,探测的温度信息实时反馈到温控表内,温控表自动调节工作状态(通过调节加热枪301的加热温度)达到精确控温的目的。
本发明实施例中,制冷组件包括液氮罐、氮气瓶、球型阀、圆形气盒303和节流阀304。其中,液氮罐通过气管依次与氮气瓶和球型阀连接,该球型阀电性连接至温度控制组件的温控表。球型阀还连接至样品腔302上的节流阀304,以将冷氮气导入到样品腔302内。球型阀通过气管与样品腔302连接,可以通过调节液氮和氮气流量达到控温的目的。
同时,温度探头307电性连接温度控制组件的温控表,探测的温度信息实时反馈到温控表内,温控表自动调节工作状态,即调节球型阀的开度(调节冷氮气的流量)达到控温的目的。
另外,在进行低温实验时,由于装置整体内外温差较大,窗口外表面容易凝结水汽,影响X射线散射结果,如图9所示,样品腔302前后设有入射光窗口和出射光窗口,入射光窗口和出射光窗口各自安装有圆形气盒303。将氮气通入圆形气盒303中排出外层窗口处的空气,防止外部窗口结霜问题。
本发明实施例中,辅助组件还包括散热风扇110,散热风扇110间隔置于底板101的两端;和/或,支撑组件还包括多个橡胶底脚109,多个橡胶底脚109设于底板101下端面。
基于上述公开内容,可以理解的是,在薄膜的原位高速拉伸实验中,四个伺服电机201的同步性是非常重要的。另外,装置要求伺服电机201要在非常短的时间内加速到指定的速度,通过调试实现伺服电机201同时启动以及伺服电机201的加速时间控制在10ms以内。需要指出的是,虽然伺服电机201的加速时间已经短至毫秒级,但是仍然不可忽视。在放置实验样品时,样品需要预留一段长度以供加速使用。加速过程中拉辊203边缘的某一点所走过的距离为:
式中,t为加速时间,n为电机转速,R为拉辊半径。根据该公式即可计算出加速过程预留的样品长度。
以上只是示例性说明,本发明实施例不限于此。例如,在一些实施例中,上述原位高速拉伸装置还可与高速CCD相机联用,高速CCD相机对拉伸过程进行实时的跟踪拍摄,观察样品断裂位置和是否发生非均匀形变,并判断样品拉伸起始点和断裂终点,此外,还可以根据高速CCD相机拍摄到的拉伸图片获得样品的真应变和真应力。
得益于高亮度特性赋予的高时间、高空间的分辨优势,同步辐射X射线在高分子薄膜的研究中得到越来越多的应用。同步辐射宽角、小角和超小角X射线散射(WAXS/SAXS/USAXS)是研究高分子晶体和其他凝聚态结构的重要表征手段,三者结合可以实现0.1-1000nm空间尺度的结构检测,同时配合超快探测器的使用,可以实现亚毫秒时间尺度的检测。本发明提供的原位高速拉伸装置与同步辐射X射线联用,可以实现在线跟踪高分子材料在外力、温度等多维外场作用下的多尺度结构演化。
通过上述实施例,本发明提供的原位高速拉伸装置,还可以进行宽应变速率(10
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。贯穿附图,相同的元素由相同或相近的附图标记来表示。可能导致本发明的理解造成混淆时,将省略常规结构或构造。并且图中各部件的形状、尺寸、位置关系不反映真实大小、比例和实际位置关系。
类似地,为了精简本发明并帮助理解各个公开方面中的一个或多个,在上面对本发明示例性实施例的描述中,本发明的各个特征有时被一起分到单个实施例、图或者对其描述中。参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或者多个实施例或示例中以合适的方式结合。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个、三个等,除非另有明确具体的限定。此外,位于元件之前的单词“一”或“一个”不排除存在多个这样的元件。除非另有说明,否则表述“大约”、“约”、“基本上”和“左右”表示在10%以内,优选地,在5%以内。
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种车用塑料的高速拉伸夹持装置
- 用于木材薄切片光学原位拉伸观测系统的原位拉伸装置
- 一种原位压缩转原位拉伸的TEM装置