摄像头模组及终端设备
文献发布时间:2023-06-19 18:27:32
本申请是分案申请,原申请的申请号是201911205850.4,原申请日是2019年11月29日,原申请的全部内容通过引用结合在本申请中。
技术领域
本发明属于光学成像技术领域,尤其涉及一种摄影光学系统的摄像头模组及终端设备。
背景技术
随着移动终端设备的普及,用户获取影像的摄影技术迅猛发展。为了满足广泛的市场需求,大靶面、大光圈、多样化的视场、紧凑结构是摄影模组的重要发展趋势。从单摄模组,到双摄模组,以及多摄模组等,实现了多种视场镜头组合,这也使得超广角类型的镜头组应用于移动终端设备。
超广角镜头具有更大的视角,但难以平衡光学畸变与紧凑结构的矛盾,因此大部分超广角镜头都具有较大的光学畸变,图像的TV畸变也非常明显。在紧凑结构限制的移动电子摄影模组领域,光学畸变问题将更加突出,难以解决。同时在终端设备的应用上,使用超广角镜头录制视频时,对视频图像进行实时畸变矫正将耗费大量处理资源,难以实现。
如何解决超广角镜头组的光学畸变问题应为业界研发的方向。
发明内容
本申请实施例提供一种摄像头模组及终端设备,摄像头模组为超广角镜头,通过在镜头中引入非旋转对称的自由曲面镜片,解决了超广角镜头的光学畸变问题,实现超广角、低畸变的成像效果,提供用户良好的体验。
第一方面,本实施例提供了一种摄像头模组,应用于终端设备,包括:多个沿着光轴方向从物侧至像侧依序排列的多个透镜,透镜的数量可以为三个、四个、五个、六个或七个等等。所述多个透镜中的至少一个透镜为自由曲面透镜。所述自由曲面透镜为非旋转对称的透镜,所述多个透镜中,从物侧至像侧方向的第一个透镜为第一透镜,所述第一透镜的物侧表面至成像面于所述光轴上的距离为TTL,所述摄像头模组的有效焦距为EFL,TTL/EFL≤2.0,实现较短TTL。所述第一透镜之物侧表面至成像面于所述光轴上的距离为TTL,具体指的是第一透镜物侧表面与光轴的交点与成像面与光轴的交点之间的距离。本申请限定所述自由曲面透镜的面型为非旋转对称。非旋转对称的自由曲面透镜可以提高摄像头模组的光学设计自由度,不需将成像区域限定为旋转对称的像圆,可实现矩形成像区域。成像面上设置电子感光元件,具体为终端设备内的摄像头的感应芯片。本申请通过对至少一个透镜为自由曲面透镜的限定,能够抑制摄像头模组的光学畸变问题,即使在超广角情况下,也能保证摄像头模组的成像效果,而且可以得到较短的摄像头模组的总长,换言之,通过在摄像头模组中引入非旋转对称的自由曲面透镜,可以实现超广角、低畸变的成像效果,即能够降低或者最小化摄像头模组的系统像差,实现校正像差,降低畸变的功能,同时自由曲面透镜还可以降低摄像头模组的TTL,使摄像头模组具有紧凑结构。
一种可能的实施方式中,X轴与所述光轴形成的第一平面,Y轴与所述光轴形成第二平面,所述X轴和所述Y轴为所述摄像头模组的所述成像面上相互垂直的两个中心轴,X轴和Y轴的交点为光轴的位置,所述自由曲面透镜为以所述第一平面为中心对称结构,所述自由曲面透镜亦为以所述第二平面为中心的对称结构。保持自由曲面透镜在X轴方向与Y轴方向的对称有利于保证成像质量,电子传感器的成像区域为矩形,自由曲面透镜在X轴方向与Y轴方向的对称使得成像区域像质保持一定对称性,有利于促进靠近光轴的中间区别的成像质量好于远离光轴的边缘区域的成像质量。
一种可能的实施方式中,所述自由曲面透镜的物侧面和/或像侧面为自由曲面,所述自由曲面的面型表达式为:
其中,z是光学表面矢高,z是关于x和y的表达式;k为圆锥系数;c为曲率半径;r为光轴方向的半径高度;有r
所述自由曲面透镜的所述面型表达式的E
第二种实施方式中,所述自由曲面透镜的物侧面和/或像侧面为自由曲面,所述自由曲面透镜的面型表达式为:
其中,z是光学表面矢高,z是关于x和y的表达式;k为圆锥系数;c为曲率半径;r为光轴方向的半径高度;有r
其中,A
第三种实施方式中,所述自由曲面透镜的物侧面和/或像侧面为自由曲面,所述自由曲面透镜的面型表达式为:
其中,z是光学表面矢高,z是关于x和y的表达式;x为X轴坐标,y为Y轴坐标;k
一种可能的实施方式中,所述X轴和所述Y轴为穿过所述成像面中心且分别平行于所述成像面长边和短边的两个中心轴。
一种可能的实施方式中,所述多个透镜的数量为N,N≥3,所述多个透镜包括从物侧至像侧方向的依次排布的所述第一透镜至第N透镜,所述第一透镜至所述第N-1透镜的物侧面和像侧面的面型均为非球面,所述第N透镜为自由曲面透镜。本申请实施例采用的透镜数量为六个,其他实施方式中透镜的数量也可以为七个、八个等,在实际实施的过程中也可以根据需要设置由三个、四个或者五个透镜组成的摄像头模组。通过在摄像头模组中引入自由曲面透镜,实现了针对超广角镜头组达到无图像畸变的视觉效果,可以实现普通非球面光学设计无法实现的成像品质。
一种可能的实施方式中,所述摄像头模组的所述成像面的有效像素区域的对角线半长度为ImgH,TTL/ImgH≤2.0,利于限制所述摄像头模组的系统总长,使所述摄像头模组具有紧凑结构,满足便携设备的设计需求。
一种可能的实施方式中,所述摄像头模组的入瞳直径为EPD,EFL/EPD≤2.2。本实施方式通过限定EPD/EPD≤2.2,限制了摄像头模组光圈数,利于成像质量。
一种可能的实施方式中,所述摄像头模组的视场角为FOV,FOV≥100deg,EFL<20mm,所述摄像头模组具有超广角的成像效果。本实施方式通过在摄像头模组中引入自由曲面透镜,实现了超广角镜头组焦距短、视角大、低畸变的成像效果,同时得到较短的摄像头模组的总长,实现超广角镜头组的紧凑型结构。
一种可能的实施方式中,所述多个透镜的数量为N个,分别为从物侧至像侧方向的依次排布的前三个所述透镜分别为所述第一透镜、第二透镜、第三透镜,所述摄像头模组还包括渐晕光阑,所述渐晕光阑设置在所述第二透镜的物侧或设置在所述第三透镜的物侧,渐晕光阑能够拦截像差大的成像光线(又称为拦截轴外点光束),提高成像质量,渐晕光阑设置在趋于摄像头模组的中间位置,有利于平衡摄像头模组的综合像差。
一种可能的实施方式中,所述多个透镜中邻近所述成像面的所述透镜为所述自由曲面透镜,所述自由曲面透镜的物侧表面的曲率半径为R61,所述自由曲面透镜的像侧表面的曲率半径为R62,满足如下条件:|f/R61|+|f/R62|<2,利于校正镜头组的综合像差。当|f/R61|+|f/R62|大于等于2的情况,不利于校正摄像头模组的综合像差,会影响成像效果。
一种可能的实施方式中,摄像头模组还包括位于多个透镜和成像面之间的红外滤光元件。通过红外滤光元件能够有效改善影像周边产生的色偏的问题。
自由曲面透镜的光学设计能够减少摄像头模组的透镜数量,减轻摄像头模组的重量,利于实现轻量化。自由曲面透镜以其灵活的空间布局和设计自由度,使得摄像头模组的结构得到简化。自由曲面透镜的光学设计增加了优化的自由度,利于控制摄像头模组的系统像差,改善摄像头模组的整体品质。
一种可能的实施方式中,所述摄像头模组还包括电子感光元件,所述电子感光元件置于所述成像面上,所述摄像头模组的所述成像面为矩形区域,匹配所述电子感光元件的感光面积且不小于所述电子感光元件的感光面积。换言之,所述电子感光元件为矩形,采用所述由曲面透镜的摄像头模组的成像面为矩形区域,可实现与感光元件的匹配,提高成像质量。
一种可能的实施方式中,所述电子感光元件的感光面的对角线长度不小于5.5mm。对于相同有效像素的感光元件,一般其尺寸越大,每个像素的单位面积也越大,感光性能就越好,就能记录更多的图像细节,本实施方式限定感光面的对角线长度不小于5.5mm,能够保证摄像头模组应用在移动终端中,具有好的感光性能,提供好的图像质量。
第二方面,本申请提供一种终端设备,包括前述任意一种实施方式所述的摄像头模组。
本申请通过在镜头组中引入非旋转对称的自由曲面透镜,解决了超广角镜头组的光学畸变问题,消除了摄像头模组成像失真的影响,改善用户体验,能够获得优秀的光学品质。
附图说明
为了更清楚地说明本发明实施例或背景技术中的技术方案,下面将对本发明实施例或背景技术中所需要使用的附图进行说明。
图1是本申请提供的摄像头模组应用在终端设备中的示意图;
图1a是自由曲面透镜在X轴方向与Y轴方向折叠对称的示意图;
图2a、图2b是本申请第一实施例提供的摄像头模组的示意图;
图2c是第一实施例的光学系统的畸变曲线;
图2d是第一实施例的光学系统的倍率色差曲线;
图3a、图3b是本申请第二实施例提供的摄像头模组的示意图;
图3c是第二实施例的光学系统的畸变曲线;
图3d是第二实施例的光学系统的倍率色差曲线;
图4a、图4b是本申请第三实施例提供的摄像头模组的示意图;
图4c是第三实施例的光学系统的畸变曲线;
图4d是第三实施例的光学系统的倍率色差曲线。
具体实施方式
下面结合本发明实施例中的附图对本发明实施例进行描述。
参阅图1,本申请涉及的摄像头模组10应用在终端设备100中。终端设备100可以为手机、平板等便携式终端,摄像头模组10可以为超广角镜头组。摄像头模组10组装在终端设备100内部,可以为终端设备100的后置摄像头或前置摄像头,或可以伸出终端设备100外壳的伸缩式的摄像头。
一种实施方式中,本申请提供的摄像头模组包括六个透镜(以六个透镜为具体实施例进行说明,本申请不限定透镜的数量),所述六个透镜沿着光轴方向从物侧至像侧依序分布分别为第一透镜、第二透镜、第三透镜、第四透镜、第五透镜和第六透镜,透镜的数量不限于六个,可以为其它数量,例如三个、四个、五个、七个等等。所述多个透镜中的至少一个透镜为自由曲面透镜,该自由曲面透镜为非旋转对称面型。非旋转对称的自由曲面透镜可以提高摄像头模组的光学设计自由度。所述第一透镜之物侧表面至成像面于所述光轴上的距离为TTL,摄像头模组的有效焦距为EFL,TTL/EFL≤2.0,实现较短TTL,有利于摄像头模组的紧凑结构。通过对至少一个透镜为非旋转对称的自由曲面的限制,能够改善超广角镜头组的光学畸变问题,同时使摄像头模组具有紧凑结构,提升用户的使用体验。透镜一到透镜五的非球面曲线方程式如下:
其中,z是光学表面矢高,z是关于x和y的表达式;k为圆锥系数;c为曲率半径;r为光轴方向的半径高度;r
本申请通过对所述自由曲面透镜的面型表达式(如下述列举了三种不同的面型表达式)的定义,实现所述自由曲面透镜在X轴方向与Y轴方向的对称,所述X轴方向和所述Y轴方向为所述摄像头模组的所述成像面上相互垂直的两个方向。
第一种实施方式中,非旋转对称的自由曲面透镜的面型表达式(即自由球面曲线方程式)表示如下:
其中,z是光学表面矢高,z是关于x和y的表达式;k为圆锥系数;c为曲率半径;r为光轴方向的半径高度;r
其中,A
所述自由曲面透镜的所述面型表达式的E
第二种实施方式中,自由曲面透镜的面型表达式为:
其中,z是光学表面矢高,z是关于x和y的表达式;k为圆锥系数;c为曲率半径;r为光轴方向的半径高度;有r
其中,A
第三种实施方式中,自由曲面透镜的面型表达式为:
其中,z是光学表面矢高;x为X轴坐标,y为Y轴坐标;k
上述各种实现方式中,自由曲面透镜可以有一个表面为自由曲面,例如物侧面或者像侧面是自由曲面,也可以两个表面都是自由曲面,即物侧面和像侧面都是自由曲面。
一种实施方式中,如图1a所示,图1a是自由曲面透镜在X轴方向与Y轴方向对称的示意图,成像面S14为矩形区域,X轴与Y轴是在成像面S14上相互垂直的两个中心轴,X轴和Y轴的交点为光轴的位置。具体而言,X轴方向为穿过矩形成像面S14的中心并平行于矩形成像面S14的长边的中心轴,Y轴方向为穿过矩形成像面S14的中心并平行于矩形成像面S14的短边的中心轴。X轴与光轴形成第一平面,Y轴与光轴形成第二平面,自由曲面透镜L6为以所述第一平面为中心对称结构,自由曲面透镜亦为以所述第二平面为中心的对称结构。保持自由曲面透镜L6以第一平面为中心对称及以第二平面为中心对称,有利于保证成像质量,有利于促进靠近光轴的中间区别的成像质量好于远离光轴的边缘区域的成像质量。
以下通过三个具体的实施例对本申请进行详细的说明。
实施例一
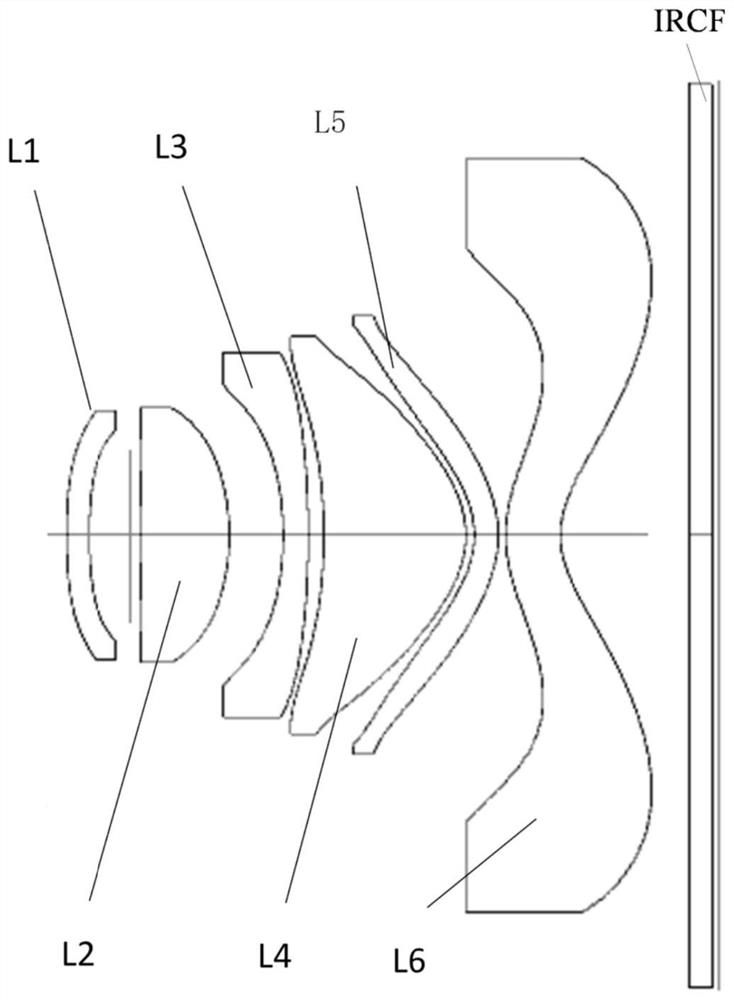
如图2a和图2b所示,中间的直线表示光轴,摄像头模组左侧为物侧,右侧为像侧。本实施例提供的摄像头模组中,沿着光轴从物侧到像侧依次为第一透镜L1、光阑STO、第二透镜L2、第三透镜L3、第四透镜L4、第五透镜L5、第六透镜L6、红外滤光元件IRCF、电子感光元件可置于成像面S14位置。本实施方式中,光阑STO放置于第一透镜L1之后,趋于摄像头模组的中间位置,有利于平衡摄像头模组的像差。
第一透镜L1具有正屈折力,且为树脂材质,其物侧表面S1近光轴处为凸面,其像侧表面S2近光轴处为凸面,并皆为非球面。
第二透镜L2具有正屈折力,且为树脂材质,其物侧表面S3近光轴处为凸面,其像侧表面S4近光轴处为凹面,并皆为非球面。
第三透镜L3具有负屈折力,且为树脂材质,其物侧表面S5近光轴处为凹面,其像侧表面S6近光轴处为凹面,并皆为非球面。
第四透镜L4具有正屈折力,且为树脂材质,其物侧表面S7近光轴处为凹面,其像侧表面S8近光轴处为凹面,并皆为非球面。
第五透镜L5具有负屈折力,且为树脂材质,其物侧表面S9近光轴处为凹面,其像侧表面S10近光轴处为凹面,并皆为非球面。
第六透镜L6具有负屈折力,且为树脂材质,其物侧表面S11近光轴处为凹面,其像侧表面S12近光轴处为凸面,并皆为自由曲面。
红外滤光元件IRCF的物侧表面S13和像侧表面均为平面。
在实施例一中,第一透镜L1物侧表面S1至无穷远物体距离成像面S14于光轴上的距离为TTL,摄像头模组的有效焦距为EFL,其可满足下列条件:TTL/EFL≤2.0,实现较短TTL,利于摄像头模组的小型化设计,节约终端设备内部空间,利于终端设备薄形化发展。
在实施例一中,第六透镜L6的自由曲面的面型表达式的E
作为实施例一的扩展,可以选择在第一透镜L1的前方(即物侧)设渐晕光阑ST1(未图示),在第六透镜L6的后方(像侧)设渐晕光阑ST2(未图示),能够有效减小摄像头模组的直径。
在实施例一中,摄像头模组的焦距为f,第六透镜L6物侧表面S11的曲率半径为R61,第六透镜L6像侧表面S12的曲率半径为R62,满足如下条件:|f/R61|+|f/R62|=1.37,利于校正镜头组的综合像差,使得摄像头模组的倍率色差小于3um,畸变小于2%。
表1a示出了本实施例的光学系统的特性的表格,曲率半径、厚度的单位均为毫米(mm)。
表1a
表1b给出了可用于第一实施例中各非球面镜面S1-S10的圆锥系数k和多项式系数a1、a2、a3、a4、a5、a6、a7、a8、a9、a10、a11、a12、a13、a14、a15。
表1b
表1c给出了可用于第一实施例中自由曲面S11-S12的圆锥系数k和高次项系数X2Y0、X0Y2、X4Y0、X2Y2、X0Y4、X6Y0、X4Y2、X2Y4、X0Y6、X8Y0、X6Y2、X4Y4、X2Y6、X0Y8。
表1c
图2c示出了第一实施例的光学系统的畸变曲线,其表示不同视场角对应的畸变大小值。
图2d示出了第一实施例的光学系统的倍率色差曲线,其表示五条不同波长的光线在不同视场角对应的倍率色差大小,图中用箭头指示线表达了五条不同波长的光线,它们的波长分别为510纳米、470纳米、610纳米、550纳米、650纳米。
根据图2c和图2d可知,第一实施例所给出的光学系统能够实现良好的成像品质。
实施例二
如图3a和图3b所示,本实施方式的摄像头模组中,沿着光轴从物侧到像侧依次为第一透镜L1、第二透镜L2、光阑STO、第三透镜L3、第四透镜L4、第五透镜L5、第六透镜L6、红外滤光元件IRCF、电子感光元件可置于成像面S14(又称为成像面)位置。本实施方式中,光阑STO放置于第二透镜L2之后,趋于摄像头模组的中间位置,有利于平衡摄像头模组的像差。
第一透镜L1具有正屈折力,且为树脂材质,其物侧表面S1近光轴处为凹面,其像侧表面S2近光轴处为凸面,并皆为非球面。
第二透镜L2具有负屈折力,且为树脂材质,其物侧表面S3近光轴处为凸面,其像侧表面S4近光轴处为凸面,并皆为非球面。
第三透镜L3具有正屈折力,且为树脂材质,其物侧表面S5近光轴处为凸面,其像侧表面S6近光轴处为凹面,并皆为非球面。
第四透镜L4具有正屈折力,且为树脂材质,其物侧表面S7近光轴处为凹面,其像侧表面S8近光轴处为凹面,并皆为非球面。
第五透镜L5具有负屈折力,且为树脂材质,其物侧表面S9近光轴处为凹面,其像侧表面S10近光轴处为凹面,并皆为非球面。
第六透镜L6具有负屈折力,且为树脂材质,其物侧表面S11近光轴处为凹面,其像侧表面S12近光轴处为凸面,并皆为自由曲面。
在实施例二中,第一透镜L1物侧表面S1至无穷远物体距离成像面S14于光轴上的距离为TTL,摄像头模组的有效焦距为EFL,其可满足下列条件:TTL/EFL≤2,实现较短TTL,利于摄像头模组的小型化设计,节约终端设备内部空间,利于终端设备薄形化发展。
在实施例二中,第六透镜L6的自由曲面的面型表达式的E
作为实施例二的扩展,可以选择在第一透镜L1的前方(即物侧)设渐晕光阑ST1(未图示),在第六透镜L6的后方(像侧)设渐晕光阑ST2(未图示),能够有效减小摄像头模组的直径。
在实施例二中,摄像头模组的焦距为f,第六透镜L6物侧表面S11的曲率半径为R61,第六透镜L6像侧表面S12的曲率半径为R62,满足如下条件:|f/R61|+|f/R62|=0.71,利于校正镜头组的综合像差,使得摄像头模组的倍率色差小于3um,畸变小于2%。
表2a示出了本实施例的光学系统的特性的表格,曲率半径、厚度的单位均为毫米(mm)。
表2a
表2b给出了可用于第二实施例中各非球面镜面S1-S10的圆锥系数k和多项式系数a1、a2、a3、a4、a5、a6、a7、a8、a9、a10、a11、a12、a13、a14、a15。
表2b
表2c给出了可用于第二实施例中自由曲面S11-S12的圆锥系数k、和高次项系数X2Y0、X0Y2、X4Y0、X2Y2、X0Y4、X6Y0、X4Y2、X2Y4、X0Y6、X8Y0、X6Y2、X4Y4、X2Y6、X0Y8。
表2c
图3c示出了第二实施例的光学系统的畸变曲线,其表示不同视场角对应的畸变大小值。
图3d示出了第二实施例的光学系统的倍率色差曲线,其表示五条不同波长的光线在不同视场角对应的倍率色差大小,图中用箭头指示线表达了五条不同波长的光线,它们的波长分别为510纳米、470纳米、610纳米、550纳米、650纳米。
根据图3c和图3d可知,第二实施例所给出的光学系统能够实现良好的成像品质。
实施例三
如图4a和图4b所示,本实施方式的摄像头模组中,沿着光轴从物侧到像侧依次为第一透镜L1、第二透镜L2、光阑STO、第三透镜L3、第四透镜L4、第五透镜L5、第六透镜L6、红外滤光元件IRCF、电子感光元件可置于成像面S14位置。
第一透镜L1具有正屈折力,且为树脂材质,其物侧表面S1近光轴处为凹面,其像侧表面S2近光轴处为凸面,并皆为非球面。
第二透镜L2具有负屈折力,且为树脂材质,其物侧表面S3近光轴处为凸面,其像侧表面S4近光轴处为凸面,并皆为非球面。
第三透镜L3具有正屈折力,且为树脂材质,其物侧表面S5近光轴处为凸面,其像侧表面S6近光轴处为凹面,并皆为非球面。
第四透镜L4具有正屈折力,且为树脂材质,其物侧表面S7近光轴处为凹面,其像侧表面S8近光轴处为凹面,并皆为非球面。
第五透镜L5具有负屈折力,且为树脂材质,其物侧表面S9近光轴处为凹面,其像侧表面S10近光轴处为凹面,并皆为非球面。
第六透镜L6具有负屈折力,且为树脂材质,其物侧表面S11近光轴处为凹面,其像侧表面S12近光轴处为凸面,并皆为自由曲面。
在实施例三中,第一透镜L1物侧表面S1至无穷远物体距离成像面S14于光轴上的距离为TTL,摄像头模组的有效焦距为EFL,其可满足下列条件:TTL/EFL≤2,实现较短TTL,利于摄像头模组的小型化设计,节约终端设备内部空间,利于终端设备薄形化发展。
在实施例三中,第六透镜L6的自由曲面的面型表达式的E
作为实施例三的扩展,可以选择在第一透镜L1的前方(即物侧)设渐晕光阑ST1(未图示),在第六透镜L6的后方(像侧)设渐晕光阑ST2(未图示),能够有效减小摄像头模组的直径。
在实施例三中,摄像头模组的焦距为f,第六透镜L6物侧表面S11的曲率半径为R61,第六透镜L6像侧表面S12的曲率半径为R62,满足如下条件:|f/R61|+|f/R62|=1.92,利于校正镜头组的综合像差,使得摄像头模组的倍率色差小于3um,畸变小于2%。
表3a示出了本实施例的光学系统的特性的表格,曲率半径、厚度的单位均为毫米(mm)。
表3a
表3b给出了可用于第三实施例中各非球面镜面S1-S10的圆锥系数k和多项式系数a1、a2、a3、a4、a5、a6、a7、a8、a9、a10、a11、a12、a13、a14、a15。
表3b
表3c给出了可用于第三实施例中自由曲面S11-S12的圆锥系数k、和高次项系数X2Y0、X0Y2、X4Y0、X2Y2、X0Y4、X6Y0、X4Y2、X2Y4、X0Y6、X8Y0、X6Y2、X4Y4、X2Y6、X0Y8。
表3c
图4c示出了第三实施例的光学系统的畸变曲线,其表示不同视场角对应的畸变大小值。
图4d示出了第三实施例的光学系统的倍率色差曲线,其表示五条不同波长的光线在不同视场角对应的倍率色差大小,图中用箭头指示线表达了五条不同波长的光线,它们的波长分别为510纳米、470纳米、610纳米、550纳米、650纳米。
根据图4c和图4d可知,第三实施例所给出的光学系统能够实现良好的成像品质。
以上所述是本申请的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本申请原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本申请的保护范围。
- 深度摄像头模组、移动终端及摄像头模组互扰处理方法
- 一种激光模组及终端设备
- 摄像头模组及其制作方法、终端
- 摄像头模组、终端设备及摄像头模组的控制方法
- 摄像头模组、终端设备及摄像头模组的制作方法