一种移位护理机器人
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及医疗辅助器械技术领域,具体涉及一种移位护理机器人。
背景技术
近年来,我国人口老龄化趋势明显,下肢行动不便的高龄人群和部分残疾的人士在日常生活当中,通常无法独自完成上下床、移动到坐便器或轮椅、或者移动到其他地方,需要护理者的帮忙与照料,同时需要付出时间和体力消耗,为了减轻护理者的体力负担,为患者提供更多便利,如中国专利申请号为CN202210854645.6,公布日为2022.09.23,其公开了一种护理移位小车,包括车体,车体包括移动底架和设置在移动底架上的立柱,立柱内部中空设置,立柱的内部铰接有杠杆,杠杆倾斜且活动设置在立柱的内部;杠杆的中间位置设置有操作杆,立柱在杠杆的下端的一侧设置有下限位挡板,下限位挡板位于操作杆的一侧;立柱在操作杆远离下限位挡板的一侧有上限位
挡板,上限位挡板位于杠杆与操作杆之间,且远离下限位挡板的一侧;杠杆在远离下限位挡板的端部上设置有胸部支撑托;杠杆在靠近下限位挡板的一侧设有气弹簧,气弹簧的两端分别铰接在杠杆和下限位挡板上;本发明便于将坐位姿势的病患移动到椅子、轮椅、坐便器等场景,以便代替护理人员抱起病患,降低护理人员的体力负担。但是该结构需要操作者操作操作杆然后使得胸部支撑托将患者托起,对于操作者来说需要通过杠杆的方式将人体托起,操作麻烦,同时操作者无法对胸部支撑托的高度以及速度进行缓慢调节,若调节过快,比如将患者从床边托起时,采用杠杆绕着一个点进行圆周运动,从而会使得胸部支撑托绕着铰接点做圆周运动,而胸部支撑托上面的患者也会跟随进行圆周运动,从而使得患者容易产生发晕情况,进而给患者造成不适应感。
发明内容
本发明目的在于提供一种移位护理机器人,能够直接托起患者的上半身,能自动托起患者,且托起高度以及速度可调节,舒适度高,安全可靠且便捷。
为达到上述目的,一种移位护理机器人,用于帮助下肢障碍患者离开床移动到其他地方,包括底盘和托起装置,还包括控制系统,所述托起装置的一端设置在所述底盘上,所述托起装置包括胸托架、升降装置以及摆杆,所述升降装置包括一级升降装置和二级升降装置,胸托架的底端与摆杆的一端转动连接,胸托架的底端同时与二级升降装置的一端转动连接,同时二级升降装置的另一端固定在摆杆上,摆杆的另一端与一级升降装置的一端转动连接,摆杆的另一端与底座转动连接,且底座与一级升降装置的另一端连接,所述底盘底部设置有行走装置,所述控制系统控制底盘进行移动,以及升降装置进行升降同时控制升降装置升降。
以上设置,通过在底盘上设置升降装置和摆杆,能够使得托起装置通过升降装置驱动摆杆在底盘上转动,从而实现调节胸部支撑托向患者转动,当需要托起患者时,通过升降装置驱动摆杆向远离患者方向进行转动,且通过控制系统控制升降装置升降,能满足患者被托起时的处于不同高度,由于升降装置包括一级升降装置和二级升降装置,进而使得胸部支撑托的运动并非是绕着一个点进行圆周形摆动,而是通过两个升降装置使得运动曲线为非圆周形,从而提高患者的舒适度;通过将胸托架设置在摆杆上,同时将二级升降装置与胸托架连接,使得在二级升降装置的收缩作用下,摆杆开始转动,进而带动胸托架向前上方转动,从而将患者从床上的位置托起,使得患者与床脱离,这时控制系统控制底盘移动,从而能够便捷地将患者抬起然后移动到目标位置上,实现患者从床上移动到轮椅、坐便器等地方,确保安全性的同时实用性高,操作方法简单且可靠便捷。
进一步的,所述底盘上设置有两个驱动电机、两个驱动轮、同步传动带和万向轮,万向轮设置在驱动轮的两端,驱动电机的输出端通过同步传动带与驱动轮转动连接,驱动电机错位设置安装在底盘底部的前后方向上。
以上设置,通过在底盘上设置驱动电机和驱动轮,并使得驱动电机通过同步传动带与驱动轮转动连接,从而能够驱动自助移位护理机器人移动;通过在驱动轮的两端设置万向轮,同时通过控制系统对驱动电机进行控制,便于实现自助移位护理机器人变换方向以及位置。
进一步的,所述一级升降装置包括一级电动推杆箱体和一级电动推杆,一级电动推杆箱体的底端通过固定板与底盘连接,固定板的底端固定在底盘上,一级电动推杆箱体的底端与固定板转动连接,一级电动推杆的一端套接在一级电动推杆箱体里面,一级电动推杆的另一端设有通孔,摆杆另一端的中部设置有连接孔,一级电动推杆的另一端内嵌于摆杆的连接孔内且通过连接轴穿过通孔与连接孔实现转动连接。
以上设置,通过设置一级升降装置,并且使得一级电动推杆内嵌于摆杆内通过连接轴与摆杆连接,从而在一级电动推杆伸缩时,能够带动摆杆要一起转动。
进一步的,所述二级升降装置包括二级电动推杆和二级电动推杆箱体,二级电动推杆的一端套接在二级电动推杆箱体里面,摆杆的一端上固定连接有安装板,二级电动推杆箱体的底端通过定位块固定设置在安装板上,二级电动推杆的输出端设有通孔,连接轴穿过连接块上的通孔与胸托架转动连接。
以上设置,通过设置二级升降装置,并将二级升降装置设置摆杆的一端,同时使二级升降装置与胸托架转动连接,使得在二级升降装置的电动推杆伸缩时,能够带动胸托架转动,进而使胸托架转动到目标角度,从而将患者托起。
进一步的,所述摆杆的一端的两侧分别设置有连接板,连接板之间通过支撑杆固定连接,连接板的一端通过连接杆与胸托架转动连接,连接板的另一端通过螺栓与摆杆的一端固定连接。
以上设置,通过摆杆的一端设置连接板,并通过设置连接杆分别与胸托架和摆杆转动连接,从而实现胸托架可以绕着摆杆的转动,进而在将患者托起后,能够使胸托架转动到适宜的角度,另外通过在两个连接板之间设置有支撑杆,从而确保连接板之间与胸托架之间的连接强度。
进一步的,所述摆杆的另一端还设置有调节装置,所述摆杆的连接孔的两侧设置有安装通孔,所述调节装置包括固定架和顶板,顶板固定设置在固定架的一端,连接轴穿过安装通孔与固定架的另一端转动连接。
以上设置,通过在摆杆上设置调节装置,能够实现患者膝盖调节的同时,也可以使患者更舒适的放置腿和膝盖;通过设置调节装置,并使得调节装置的固定架与摆杆的一端转动连接,且在固定架上设置顶板,从而将患者托起后,用于放置患者的膝盖,并且通过转动调节装置可以调节不同角度,使患者更加舒适。
进一步的,所述摆杆底端的两侧设置有安装孔,所述摆杆的底端通过销轴穿过安装孔与轴承座转动连接,轴承座的底部固定安装在底盘上,所述摆杆底端的中部设置有凹槽,凹槽的横截面形状设置为U形,限位装置的一端位于凹槽内,限位装置的另一端固定安装在底盘上。
以上设置,通过在底盘上设置轴承座,能够使得摆杆通过销轴与底盘实现自转动连接;通过在底盘上设置限位装置,能够对摆杆的转动角度起到限位作用。
进一步的,所述胸托架底部的两侧上固定设置有用于放置患者的手臂肘托板。
以上设置,便于患者放置手臂,提高患者的舒适度。
进一步的,摆杆的一端与摆杆的另一端之间形成第一角度,第一角度大于90°。
以上设置,通过设置摆杆的一端与摆杆的另一端之间形成大于90°的角度,从而使得摆杆在没有转动之前摆杆的一端与另一端是倾斜设置,从而使得胸托架的一端更加容易与患者接触。
附图说明
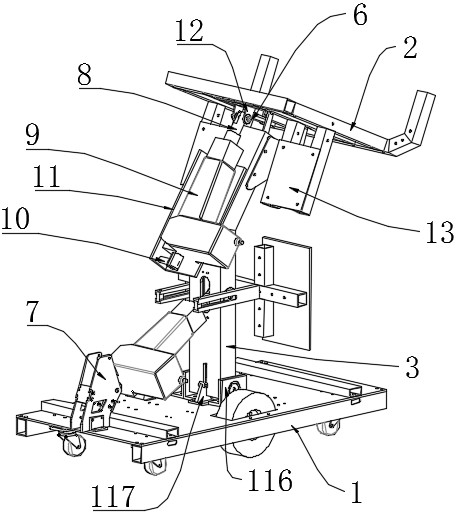
图1是本发明的整体结构示意图。
图2是本发明的底盘结构示意图。
图3是本发明的侧视图。
图4是本发明托起前的结构示意图。
图5是本发明托起后的结构示意图。
图6是本发明部分结构的爆炸图。
图7是本发明的胸托架运动轨迹曲线图。
具体实施方式
下面结合附图和具体实施方式对本发明的实施例做进一步进行详细说明。
如图1-7所示,本发明实施例提供了一种移位护理机器人,用于帮助下肢障碍患者离开床移动到其他地方,包括底盘1和托起装置,还包括控制系统,托起装置包括胸托架2、升降装置以及摆杆3,其中升降装置包括一级升降装置和二级升降装置,一级升降装置包括一级电动推杆箱体4和一级电动推杆5,一级电动推杆5的一端套接在一级电动推杆箱体4里面,一级电动推杆5的另一端设有通孔,摆杆3另一端的中部设置有连接孔,一级电动推杆5的另一端内嵌于摆杆3的连接孔内且通过连接轴6穿过通孔与连接孔实现转动连接,一级电动推杆箱体4的底端与固定板7的一端转动连接,固定板7的另一端通过螺栓固定安装在底盘1上。
如图1所示,二级升降装置包括二级电动推杆8和二级电动推杆箱体9,二级电动推杆8的一端套接在二级电动推杆箱体9里面,二级电动推杆箱体9的底端通过定位块10固定设置在安装板11上,其中安装板11通过螺栓固定安装在摆杆3的一端,二级电动推杆8的输出端设有通孔,连接轴6穿过通孔与连接耳12的一端转动连接,连接耳12的另一端通过螺栓固定安装在胸托架2。
如图1和图3所示,胸托架2靠近二级升降装置的一端面上固定设置有便于患者放置手臂肘托板13,提高患者的舒适度;胸托架2上设置有垫板14,通过垫板14与连接杆15的一端转动连接,连接杆15的另一端与连接板16的一端转动连接,连接板16的另一端通过螺栓与摆杆3的一端固定连接,连接板16之间设置有支撑杆20,支撑杆20的两端通过螺栓分别与连接板16固定连接。
如图2所示,底盘1上设置有两个驱动电机111、两个驱动轮112、同步传动带115和万向轮114,驱动轮112设置安装在底盘1底部的中部,万向轮114设置在驱动轮112的两端,驱动电机111错位设置安装在底盘1底部的前后方向上,驱动电机111的输出端通过同步传动带115与驱动轮112转动连接,使得驱动电机111通过同步传动带115与驱动轮112转动连接,同时通过控制系统对驱动电机111进行控制,从而能够驱动自助移位护理机器人移动和变换方向,本实施例中,控制系统的具体工作原理为现有技术在此不再累述。
如图1和图3所示,本实施例中,摆杆3的另一端设置有调节装置,摆杆3的连接孔的两侧设置有安装通孔,其中调节装置包括固定架18和顶板19,顶板19通过螺栓固定安装在固定架18的一端,连接轴6穿过安装通孔与固定架18的另一端转动连接,通过设置调节装置,用于放置患者的膝盖,并且通过转动调节装置可以调节不同角度,使患者更加舒适;摆杆3底端的两侧设置有安装孔,底盘1的上端面固定安装有轴承座116和限位装置117,摆杆3的底端通过销轴穿过安装孔与轴承座116转动连接,摆杆3底端的中间设置有凹槽,其中凹槽的横截面形状设置为U型,限位装置117的一端位于凹槽内,限位装置117的另一端通过螺栓固定安装在底盘1上,通过在底盘1上设置限位装置,能够对摆杆3的转动角度起到限位作用。
本实施例中,如图7所示,一级升降装置和二级升降装置同时推动时,由于一级升降装置驱动摆杆绕着一级升降装置与底座的铰接点进行转动,而二级升降装置进行仅仅伸缩驱动使得其绕着二级升降装置与胸部支撑托的铰接处进行转动,从而使得胸部支撑托并非简单地绕着一级升降装置进行圆周形运动轨迹运动,而是在一级升降装置的基础上同时进行转动,从而使得整个运动过程为非圆周形,本实施例中,一级升降装置以速度V1进行匀速运动,二级升降装置以速度V2进行匀速运动。图7中横坐标为胸托架2运动面距离垂直面的距离,纵坐标为胸托架2运动面距离水平面所在的距离,图中可以胸托架2可以形成平缓的曲线运动轨迹,在将患者托起的过程中,相比于单个升降装置胸托架2形成的圆弧运动轨迹,双重升降装置串联推动时,胸托架2实现的曲线轨迹不只是圆周中的一段圆弧,是比圆弧更加平缓的曲线,从而患者的舒适度更高,实用性更强。
本发明的工作原理:通过在底盘上设置升降装置和摆杆,能够使得托起装置通过升降装置驱动摆杆在底盘上转动,从而实现调节胸部支撑托向患者转动,当需要托起患者时,通过升降装置驱动摆杆向远离患者方向进行转动,且通过控制系统控制升降装置升降的速度以及高度,能满足患者被托起时的处于不同高度以及速度,从而提高患者的舒适度;通过将胸托架设置在摆杆上,同时将二级升降装置与胸托架连接,使得在二级升降装置的收缩作用下,摆杆开始转动,进而带动胸托架向前上方转动,从而将患者从床上的位置托起,使得患者与床脱离,这时控制系统控制底盘移动,从而能够便捷地将患者抬起然后移动到目标位置上,实现患者从床上移动到轮椅、坐便器等地方,确保安全性的同时实用性高,操作方法简单且可靠便捷。
- 一种辅助起立移位机器人
- 一种仿生机器人用便于更换的清洁护理装置
- 一种人体移位护理机器人
- 一种石材护理机器人用滴液组件及石材护理机器人