工业用机器人
文献发布时间:2023-06-19 19:16:40
技术领域
本发明涉及一种用于对输送对象物进行输送的工业用机器人。
背景技术
以往,已知一种在真空中输送液晶显示器用的玻璃基板的工业用机器人(例如,参照专利文献1)。专利文献1所记载的工业用机器人具备两个手、以能够转动的方式连接两个手的臂、以及以能够转动的方式连接臂的主体部。臂由在前端侧以能够转动的方式连接两个手中的每一个的两个前端侧臂部和以能够转动的方式连接两个前端侧臂部的基端侧的一个共同臂部构成。共同臂部形成为大致V形状。
现有技术文献
专利文献
专利文献1:日本特开2018-15839号公报
发明内容
发明所要解决的技术问题
专利文献1所记载的工业用机器人例如向工艺处理室搬入玻璃基板,或者从工艺处理室搬出玻璃基板。在工艺处理室中,为了制造液晶显示器,对玻璃基板进行规定的处理。例如,在工艺处理室中,对玻璃基板进行使用局部地覆盖玻璃基板的表面的掩模的规定处理。如果在工艺处理室中使用掩模,则可能产生必须定期将使用过的掩模从工艺处理室搬出并将清洗过的掩模搬入工艺处理室中,以清洗用过的脏掩模的状况。
在该情况下,如果通过向工艺处理室输送玻璃基板的工业用机器人进行掩模向工艺处理室的输送,则可以简化液晶显示器的制造系统的结构。另一方面,掩模的重量例如为玻璃基板的重量的30倍以上,与玻璃基板相比,掩模较重。因此,难以直接使用输送玻璃基板的工业用机器人输送掩模。
为了能够通过玻璃基板输送用的工业用机器人进行掩模的输送,提高工业用机器人的刚度即可。但是,如果为了输送输送频率比玻璃基板的输送频率低的掩模而单纯地提高工业用机器人的刚度,则工业用机器人的制造成本等成本会变高。
因此,本发明的课题在于提供一种工业用机器人,其能够输送掩模等比较重的输送对象物,并且能够有效地输送玻璃基板等比较轻的输送对象物,也能够减少成本。
解决技术问题所采用的技术方案
为了解决上述课题,本发明提供一种工业用机器人,其特征在于,具备:第一手及第二手,所述第一手及第二手装载输送对象物;臂,所述臂在前端侧以能够以上下方向为转动的轴向转动的方式连接第一手及第二手;以及臂支承部,所述臂支承部以能够以上下方向为转动的轴向转动的方式连接臂的基端侧,臂具备:第一前端侧臂部,所述第一前端侧臂部在前端侧以能够转动的方式连接第一手;第二前端侧臂部,所述第二前端侧臂部在前端侧以能够转动的方式连接第二手;以及共同臂部,所述共同臂部以能够以上下方向为转动的轴向转动的方式连接第一前端侧臂部的基端侧及第二前端侧臂部的基端侧,并且以能够转动的方式连接到臂支承部,共同臂部具备:第一共同臂部,所述第一共同臂部在前端侧以能够转动的方式连接第一前端侧臂部;以及第二共同臂部,所述第二共同臂部在前端侧以能够转动的方式连接第二前端侧臂部,如果将共同臂部相对于臂支承部的转动中心和第一前端侧臂部相对于第一共同臂部的转动中心在水平方向上的距离设为第一中心间距离,将共同臂部相对于臂支承部的转动中心和第二前端侧臂部相对于第二共同臂部的转动中心在水平方向上的距离设为第二中心间距离,将与第一共同臂部的长边方向和上下方向正交的方向上的第一共同臂部的宽度设为第一共同臂宽,将与第二共同臂部的长边方向和上下方向正交的方向上的第二共同臂部的宽度设为第二共同臂宽,则至少第一中心间距离小于第二中心间距离,或者第一共同臂宽大于第二共同臂宽,从而共同臂部的第一共同臂部一侧的刚度高于共同臂部的第二共同臂部一侧的刚度。
在本发明的工业用机器人中,共同臂部具备:第一共同臂部,所述第一共同臂部在前端侧以能够转动的方式连接第一前端侧臂部;以及第二共同臂部,所述第二共同臂部在前端侧以能够转动的方式连接第二前端侧臂部。另外,在本发明中,至少第一中心间距离小于第二中心间距离,或者第一共同臂宽大于第二共同臂宽,从而共同臂部的第一共同臂部一侧的刚度高于共同臂部的第二共同臂部一侧的刚度。
因此,在本发明中,能够使用第一共同臂部、第一前端侧臂部及第一手输送掩模等比较重的输送对象物。另外,在本发明中,由于共同臂部的第二共同臂部侧的刚度低于共同臂部的第一共同臂部侧的刚度,因此可能难以使用第二共同臂部、第二前端侧臂部及第二手输送比较重的输送对象物,但如果是玻璃基板等比较轻的输送对象物,则可以使用第二共同臂部、第二前端侧臂部及第二手来输送输送对象物。即,在本发明中,可以使用第一手及第二手这两个手输送比较轻的输送对象物。因此,在本发明中,能够高效地输送玻璃基板等比较轻的输送对象物。
另外,在本发明中,与共同臂部的第二共同臂部侧的刚度和共同臂部的第一共同臂部侧的刚度相等的情况相比,能够减少工业用机器人的成本。即,在本发明中,能够输送比较重的输送对象物,并能够有效地输送比较轻的输送对象物,也能够减少工业用机器人的成本。
在本发明中,优选的是,第一中心间距离小于第二中心间距离,并且第一共同臂宽大于第二共同臂宽。如果这样构成,则能够进一步提高共同臂部的第一共同臂部侧的刚度。因此,能够使用第一共同臂部、第一前端侧臂部及第一手输送更重的输送对象物。
在本发明中,优选的是,如果将第一前端侧臂部相对于第一共同臂部的转动中心和第一手相对于第一前端侧臂部的转动中心在水平方向上的距离设为第三中心间距离,将第二前端侧臂部相对于第二共同臂部的转动中心和第二手相对于第二前端侧臂部的转动中心在水平方向上的距离设为第四中心间距离,则第一中心间距离小于第二中心间距离,第一中心间距离和第三中心间距离相等,且第二中心间距离和第四中心间距离相等,从而第一前端侧臂部的刚度高于第二前端侧臂部的刚度。
如果这样构成,则由于与第一共同臂部连接的第一前端侧臂部的刚度提高,因此能够使用第一共同臂部、第一前端侧臂部及第一手输送更重的输送对象物。另外,与第二前端侧臂部的刚度和第一前端侧臂部的刚度相等的情况相比,能够减少工业用机器人的成本。
在本发明中,优选的是,如果将第一前端侧臂部在与第一前端侧臂部的长边方向和上下方向正交的方向上的宽度设为第一前端侧臂宽,将第二前端侧臂部在与第二前端侧臂部的长边方向和上下方向正交的方向上的宽度设为第二前端侧臂宽,则第一前端侧臂宽大于第二前端侧臂宽,从而第一前端侧臂部的刚度高于第二前端侧臂部的刚度。
如果这样构成,则由于与第一共同臂部连接的第一前端侧臂部的刚度提高,因此能够使用第一共同臂部、第一前端侧臂部及第一手输送更重的输送对象物。另外,与第二前端侧臂部的刚度和第一前端侧臂部的刚度相等的情况相比,能够减少工业用机器人的成本。
在本发明中,优选的是,第一前端侧臂部的上下方向上的厚度大于第二前端侧臂部的上下方向上的厚度,从而第一前端侧臂部的刚度高于第二前端侧臂部的刚度。如果这样构成,则由于与第一共同臂部连接的第一前端侧臂部的刚度提高,因此能够使用第一共同臂部、第一前端侧臂部及第一手输送更重的输送对象物。另外,与第二前端侧臂部的刚度和第一前端侧臂部的刚度相等的情况相比,能够减少工业用机器人的成本。
在本发明中,优选的是,在臂支承部以能够转动的方式连接第一共同臂部的基端侧,第二共同臂部的基端固定于第一共同臂部的基端侧。例如,在共同臂部具备以能够转动的方式连接到臂支承部的部件且第一共同臂部的基端及第二共同臂部的基端固定于该部件上的情况(即,第一共同臂部经由规定部件与臂支承部连接的情况)下,虽然第一共同臂部固定到该部件的部分的刚度有可能降低,但是如果这样构成,则由于第一共同臂部与臂支承部直接连接,因此不会产生这样的问题。
在本发明中,优选的是,从上下方向观察时,第一共同臂部和第二共同臂部所成的角度为90°。如果这样构成,则与在从上下方向观察时,第一共同臂部和第二共同臂部所成的角度为锐角或钝角的情况相比,能够简化第一共同臂部及第二共同臂部的结构,将第二共同臂部的基端容易地固定到第一共同臂部的基端侧。
发明效果
如上所述,在本发明的工业用机器人中,能够输送掩模等比较重的输送对象物,并且能够有效地输送玻璃基板等比较轻的输送对象物,也能够减少工业用机器人的成本。
附图说明
图1是本发明的实施方式的工业用机器人的俯视图。
图2是用于说明图1所示的臂的内部的结构的剖视图。
图3是图1所示的臂的俯视图。
图4是本发明的另一实施方式的工业用机器人的俯视图。
附图标记说明
1…机器人(工业用机器人);2…基板(玻璃基板,输送对象物);3…掩模(输送对象物);5…手(第一手);6…手(第二手);7…臂;8…主体部(臂支承部);10…前端侧臂部(第一前端侧臂部);11…前端侧臂部(第二前端侧臂部);12…共同臂部;20…第一共同臂部;21…第二共同臂部;25…摇臂(臂支承部);C1…共同臂部相对于臂支承部的转动中心;C2…第一前端侧臂部相对于第一共同臂部的转动中心;C3…第二前端侧臂部相对于第二共同臂部的转动中心;C4…第一手相对于第一前端侧臂部的转动中心;C5…第二手相对于第二前端侧臂部的转动中心;L1…第一中心间距离;L2…第二中心间距离;L3…第三中心间距离;L4…第四中心间距离;H1…第一共同臂宽;H2…第二共同臂宽;H3…第一前端侧臂宽;H4…第二前端侧臂宽;t1…第一前端侧臂部的上下方向上的厚度;t2…第二前端侧臂部的上下方向上的厚度;θ…第一共同臂部和第二共同臂部所成的角度。
具体实施方式
下面,参照附图,对本发明的实施方式进行说明。
(工业用机器人的结构)
图1是本发明的实施方式的工业用机器人1的俯视图。图2是用于说明图1所示的臂7的内部的结构的剖视图。
本方式的工业用机器人1(以下,设为“机器人1”。)例如是用于输送有机EL(有机电致发光)显示器用的玻璃基板2或液晶显示器用的玻璃基板2(以下,设为“基板2”。)的水平多关节机器人。机器人1被并入显示器的制造系统来使用,在真空中输送基板2。显示器的制造系统具备多个工艺处理室。
机器人1对工艺处理室进行基板2的输送。即,机器人1进行基板2向工艺处理室的搬入和基板2从工艺处理室的搬出。在工艺处理室中,为了制造显示器,对基板2进行使用局部覆盖基板2的表面的掩模3的规定的处理。定期清洗掩模3。掩模3的清洗在工艺处理室的外部进行。
本方式的机器人1也进行掩模3向工艺处理室的输送。即,机器人1进行掩模3从工艺处理室的搬出和掩模3向工艺处理室的搬入。机器人1例如将从工艺处理室搬出的使用过的掩模3搬入掩模收纳部,并且将清洗过的掩模3从掩模收纳部搬出并搬入工艺处理室。掩模3比基板2重。例如,掩模3的重量为基板2的重量的30倍以上。本方式的基板2及掩模3是由机器人1输送的输送对象物。
机器人1具备装载基板2及掩模3的手5、装载基板2的手6、以能够以上下方向为转动的轴向转动的方式连接手5、6的臂7、以及以能够以上下方向为转动的轴向转动的方式连接臂7的主体部8。手5、6以能够转动的方式连接到臂7的前端侧。在主体部8以能够转动的方式连接有臂7的基端侧。机器人1通常通过两个手5、6来输送基板2,在进行掩模3的更换时,通过手5输送掩模3。本方式的手5为第一手,手6为第二手,主体部8为臂支承部。
臂7具备:以能够转动的方式连接手5的前端侧臂部10;以能够转动的方式连接手6的前端侧臂部11;以及以能够以上下方向为转动的轴向转动的方式连接前端侧臂部10、11并且以能够转动的方式连接到主体部8的共同臂部12。本方式的臂7由前端侧臂部10、11和共同臂部12构成。手5以能够转动的方式连接到前端侧臂部10的前端侧。手6以能够转动的方式连接到前端侧臂部11的前端侧。本方式的前端侧臂部10为第一前端侧臂部,前端侧臂部11为第二前端侧臂部。
在共同臂部12,以能够转动的方式连接有前端侧臂部10、11的基端侧。具体而言,共同臂部12形成为从上下方向观察时的形状为V形状,在形成V形状的共同臂部12的一前端侧,以能够转动的方式连接有前端侧臂部10的基端侧,在共同臂部12的另一前端侧,以能够转动的方式连接有前端侧臂部11的基端侧。在主体部8,以能够转动的方式连接有共同臂部12的基端侧。具体而言,形成V形状的共同臂部12的中心部分(顶点部分)以能够转动的方式与主体部8连接。关于臂7的更具体的结构,稍后描述。
手5配置于比手6靠下侧的位置。前端侧臂部10配置于比手5靠下侧的位置。前端侧臂部11配置于比手6靠上侧的位置。共同臂部12配置于比前端侧臂部10靠下侧的位置。即,前端侧臂部10、11配置于比共同臂部12靠上侧的位置。共同臂部12配置于比主体部8靠上侧的位置。
手5、6具备与臂7连接的基部14和从基部14向水平方向突出的叉部15。手5的基部14以能够转动的方式连接到前端侧臂部10的前端侧,手6的基部14以能够转动的方式连接到前端侧臂部11的前端侧。叉部15固定于基部14。在手5的叉部15装载基板2及掩模3。即,手5输送基板2,并且也输送掩模3。在手6的叉部15装载基板2。即,手6输送基板2,但不输送掩模3。
机器人1具备臂部驱动机构16和臂部驱动机构17,上述臂部驱动机构16使前端侧臂部10相对于共同臂部12转动,并且使手5相对于前端侧臂部10转动,上述臂部驱动机构17使前端侧臂部11相对于共同臂部12转动,并且使手6相对于前端侧臂部11转动。另外,机器人1具备使共同臂部12相对于主体部8转动的臂部驱动机构和使臂7相对于主体部8升降的升降机构。
(臂的具体结构)
图3是图1所示的臂7的俯视图。
如上所述,臂7由前端侧臂部10、11和共同臂部12构成。前端侧臂部10、11的从上下方向观察时的形状为细长的椭圆形状,并且形成为上下方向上的厚度较薄的块状。前端侧臂部10、11形成为空心状。前端侧臂部10的厚度(上下方向上的厚度)t1恒定,前端侧臂部11的厚度(上下方向上的厚度)t2恒定。
如上所述,共同臂部12形成为从上下方向观察时的形状为V形状。共同臂部12形成为空心状。共同臂部12具备以能够转动的方式连接前端侧臂部10的第一共同臂部20和以能够转动的方式连接前端侧臂部11的第二共同臂部21。本方式的共同臂部12由第一共同臂部20和第二共同臂部21构成。
第一共同臂部20的从上下方向观察时的形状为细长的椭圆形状,并且形成为上下方向上的厚度比较薄的块状。第二共同臂部21的从上下方向观察时的形状为细长的大致长方形状,并且形成为上下方向上的厚度比较薄的块状。从上下方向观察时的第二共同臂部21的前端的形状为半圆形,从上下方向观察时的第二共同臂部21的基端的形状为直线形。第一共同臂部20的厚度(上下方向上的厚度)恒定,第二共同臂部21的厚度(上下方向上的厚度)恒定。另外,第一共同臂部20的厚度和第二共同臂部21的厚度相等。
前端侧臂部10以能够转动的方式连接到第一共同臂部20的前端侧。前端侧臂部11以能够转动的方式连接到第二共同臂部21的前端侧。在主体部8,以能够转动的方式连接有第一共同臂部20的基端侧。第二共同臂部21的基端固定于第一共同臂部20的基端侧。第一共同臂部20和第二共同臂部21在上下方向上配置于相同位置。从上下方向观察时,第一共同臂部20和第二共同臂部21所成的角度θ为90°。
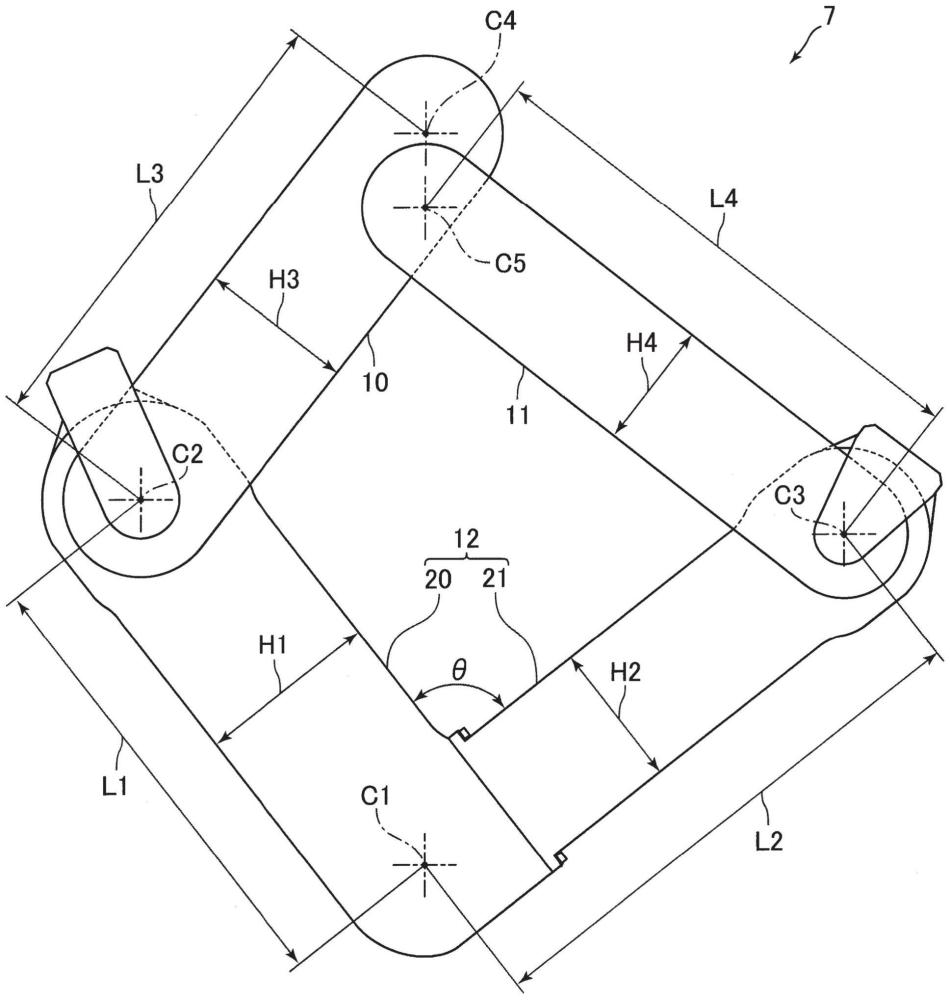
如图3所示,如果将共同臂部12相对于主体部8的转动中心C1和前端侧臂部10相对于第一共同臂部20的转动中心C2在水平方向上的距离设为第一中心间距离L1,将前端侧臂部11相对于第二共同臂部21的转动中心C3和转动中心C1在水平方向上的距离设为第二中心间距离L2,则第一中心间距离L1小于第二中心间距离L2。另外,如果将第一共同臂部20在与第一共同臂部20的长边方向和上下方向正交的方向上的宽度设为第一共同臂宽H1,将第二共同臂部21在与第二共同臂部21的长边方向和上下方向正交的方向上的宽度设为第二共同臂宽H2,则第一共同臂宽H1大于第二共同臂宽H2。
这样,第一中心间距离L1小于第二中心间距离L2,且第一共同臂宽H1大于第二共同臂宽H2,并且如上所述,第一共同臂部20的厚度和第二共同臂部21的厚度相等,共同臂部12的第一共同臂部20侧的刚度高于共同臂部12的第二共同臂部21侧的刚度。具体而言,共同臂部12的转动中心C1和转动中心C2之间的部分的刚度高于共同臂部12的转动中心C1和转动中心C3之间的部分的刚度。
另外,如图3所示,如果将手5相对于前端侧臂部10的转动中心C4和转动中心C2在水平方向上的距离设为第三中心间距离L3,将手6相对于前端侧臂部11的转动中心C5和转动中心C3在水平方向上的距离设为第四中心间距离L4,则第一中心间距离L1和第三中心间距离L3相等,且第二中心间距离L2和第四中心间距离L4相等。即,第三中心间距离L3小于第四中心间距离L4。
另外,如果将前端侧臂部10在与前端侧臂部10的长边方向和上下方向正交的方向上的宽度设为第一前端侧臂宽H3,将前端侧臂部11在与前端侧臂部11的长边方向和上下方向正交的方向上的宽度设为第二前端侧臂宽H4,则第一前端侧臂宽H3大于第二前端侧臂宽H4。此外,如图2所示,前端侧臂部10的厚度t1大于前端侧臂部11的厚度t2。
因此,前端侧臂部10的刚度大于前端侧臂部11的刚度。具体而言,前端侧臂部10的转动中心C2和转动中心C4之间的部分的刚度高于前端侧臂部11的转动中心C3和转动中心C5之间的部分的刚度。另外,在本方式中,前端侧臂部10的长度(长边方向上的长度)小于前端侧臂部11的长度(长边方向上的长度)。
臂7能够在以手5、6的前端(具体而言,叉部15的前端)远离主体部8和共同臂部12的连接部即关节部23的方式伸长的位置和以手5、6的前端靠近关节部23的方式伸缩的位置之间相对于主体部8进行伸缩。在臂7的前端侧臂部10侧的部分以手5的前端远离关节部23的方式伸长时,臂7的前端侧臂部11侧的部分收缩,在臂7的前端侧臂部11侧的部分以手6的前端远离关节部23的方式伸长时,臂7的前端侧臂部10侧的部分收缩。在臂7相对于主体部8伸缩时,手5、6以相对于主体部8朝向恒定方向的状态沿水平方向直线移动。
(本方式的主要效果)
如上所述,在本方式中,第一中心间距离L1小于第二中心间距离L2,并且第一共同臂宽H1大于第二共同臂宽H2,共同臂部12的第一共同臂部20侧的刚度高于共同臂部12的第二共同臂部21侧的刚度。因此,在本方式中,能够使用第一共同臂部20、前端侧臂部10及手5输送重量较重的掩模3。
另外,在本方式中,由于共同臂部12的第二共同臂部21侧的刚度低于共同臂部12的第一共同臂部20侧的刚度,因此难以使用第二共同臂部21、前端侧臂部11及手6输送掩模3,但如果是重量较轻的基板2,则能够使用第二共同臂部21、前端侧臂部11及手6输送基板2。即,在本方式中,能够使用两个手5、6输送基板2。因此,在本方式的机器人1中,能够高效地输送重量较轻的基板2。
另外,在本方式中,与共同臂部12的第二共同臂部21侧的刚度和共同臂部12的第一共同臂部20侧的刚度相等的情况相比,能够减少机器人1的成本。即,在本方式的机器人1中,能够输送重量较重的掩模3,并且能够有效地输送重量较轻的基板2,也能够减少机器人1的成本。
在本方式中,第三中心间距离L3小于第四中心间距离L4,且第一前端侧臂宽H3大于第二前端侧臂宽H4,并且前端侧臂部10的厚度t1大于前端侧臂部11的厚度t2,前端侧臂部10的刚度高于前端侧臂部11的刚度。即,在本方式中,与第一共同臂部20连接的前端侧臂部10的刚度提高。因此,在本方式中,能够使用第一共同臂部20、前端侧臂部10及手5输送更重的掩模3。另外,在本方式中,与前端侧臂部11的刚度和前端侧臂部10的刚度相等的情况相比,能够减少机器人1的成本。
在本方式中,在主体部8以能够转动的方式连接有第一共同臂部20的基端侧,第二共同臂部21的基端固定于第一共同臂部20的基端侧。例如,在共同臂部12具备以能够转动的方式与主体部8连接的部件且在该部件上固定有第一共同臂部20的基端及第二共同臂部21的基端的情况(即,第一共同臂部20经由规定部件与主体部8连接的情况)下,第一共同臂部20固定到该部件的部分的刚度有可能降低,但在本方式中,由于第一共同臂部20与主体部8直接连接,因此不会产生这样的问题。
在本方式中,从上下方向观察时,第一共同臂部20和第二共同臂部21所成的角度θ为90°。因此,在本方式中,与角度θ为锐角或钝角的情况相比,简化了第一共同臂部20及第二共同臂部21的结构,能够将第二共同臂部21的基端容易地固定到第一共同臂部20的基端侧。
(工业用机器人的变更例)
图4是本发明的另一实施方式的机器人1的俯视图。
在上述的方式中,如图4所示,机器人1也可以具备以能够转动的方式连接臂7的基端侧并且以能够转动的方式与主体部8连接的摇臂25。在图4所示的变更例中,摇臂25成为以能够转动的方式连接臂7的基端侧的臂支承部。摇臂25的从上下方向观察时的形状为细长的椭圆形状,并且形成为上下方向上的厚度比较薄的块状。臂7的基端侧与摇臂25的前端侧连接。在主体部8连接有摇臂25的基端侧。
摇臂25配置于比臂7靠下侧的位置,并且配置于比主体部8靠上侧的位置。臂7能够相对于摇臂25以上下方向为转动的轴向进行转动。摇臂25能够相对于主体部8以上下方向为转动的轴向进行转动。机器人1具备:使共同臂部12相对于摇臂25转动的臂部驱动机构;使摇臂25相对于主体部8转动的臂部驱动机构;以及使摇臂25相对于主体部8升降的升降机构。
(其他实施方式)
上述的方式是本发明的最佳方式的一例,但不限于此,在不变更本发明的主旨的范围内可以实施各种变形。
在上述的方式中,第一共同臂部20的厚度也可以大于第二共同臂部21的厚度。另外,在上述的方式中,如果第一中心间距离L1小于第二中心间距离L2,且共同臂部12的第一共同臂部20侧的刚度高于共同臂部12的第二共同臂部21侧的刚度,则第一共同臂宽H1和第二共同臂宽H2也可以相等。另外,在上述的方式中,如果第一共同臂宽H1大于第二共同臂宽H2,且共同臂部12的第一共同臂部20侧的刚度高于共同臂部12的第二共同臂部21侧的刚度,则第一中心间距离L1和第二中心间距离L2也可以相等。
即,至少第一中心间距离L1小于第二中心间距离L2,或者第一共同臂宽H1大于第二共同臂宽H2,共同臂部12的第一共同臂部20侧的刚度高于共同臂部12的第二共同臂部21侧的刚度即可。但是,如果像上述的方式那样,第一中心间距离L1小于第二中心间距离L2,并且第一共同臂宽H1大于第二共同臂宽H2,则能够进一步提高共同臂部12的第一共同臂部20侧的刚度。因此,在上述的方式中,能够使用第一共同臂部20、前端侧臂部10及手5输送更重的掩模3。
在上述的方式中,如果前端侧臂部10的刚度高于前端侧臂部11的刚度,则第三中心间距离L3和第四中心间距离L4可以相等,第一前端侧臂宽H3和第二前端侧臂宽H4也可以相等,前端侧臂部10的厚度t1和前端侧臂部11的厚度t2也可以相等。另外,在上述的方式中,前端侧臂部11的刚度和前端侧臂部10的刚度也可以相等。
在上述的方式中,共同臂部12也可以具备以能够转动的方式与主体部8连接的臂基部。在该情况下,例如,第一共同臂部20的基端及第二共同臂部21的基端固定于该臂基部。另外,在上述的方式中,从上下方向观察时,第一共同臂部20和第二共同臂部21所成的角度θ可以为钝角,也可以为锐角。另外,在上述的方式中,可以通过手5输送基板2及掩模3以外的输送对象物,也可以通过手6输送基板2以外的输送对象物。
- 工业用机器人、工业用机器人的控制方法及工业用机器人的指示方法
- 工业用机器人、工业用机器人的控制方法及工业用机器人的指示方法