多角度神经阻滞穿刺针进针器
文献发布时间:2023-06-19 19:20:08
技术领域
本发明涉及医疗器械技术领域,尤其涉及多角度神经阻滞穿刺针进针器。
背景技术
穿刺针是在微创手术中对肾脏、肝脏、肺、乳腺、甲状腺、前列腺、胰腺、睾丸、子宫、卵巢、体表等多种器官的组织取样和注射治疗的医疗器械。在进行穿刺针穿刺的时候往往需要进针器件进行引导穿刺针的穿刺路线,现有的进针器大多数为一个可旋转调节的空心柱,这种不可了解穿刺针的穿刺深度和角度,对于倾斜的角度穿刺更加不方便捕捉到针头的插入深度和针端的到达表皮的竖直距离,并且在引导的时候容易污染到针头。
鉴于以上我们提供多角度神经阻滞穿刺针进针器用于解决以上问题。
发明内容
针对上述情况,本发明提供多角度神经阻滞穿刺针进针器,该进针器能够辅助穿刺针进入身体内部,并且能够引导穿刺针的进针方向,当穿刺针的位置调节完成后可以实时检测出穿刺针的穿刺深度和穿刺针头到达身体表皮的竖直深度,方便医生了解穿刺针的位置和深度。
多角度神经阻滞穿刺针进针器,包括器体,其特征在于,所述器体的中部转动设置有可旋转的旋转件,所述旋转件的中部设置有可与针头接触的进针柱,所述器体的一侧设置有可测量穿刺长度的长度测量机构,所述器体的另一侧设置有可测量竖直穿刺深度的深度测量机构,所述旋转件的上表面设置有进针消毒机构,所述进针柱转动设置于旋转件的中部,所述长度测量机构包括长度板、边轮、传送带、中部轮和内部带,所述长度板固定设置于器体的一侧,所述进针柱的一侧传动设置有内部带。
上述技术方案有益效果在于:
(1)该进针器能够辅助穿刺针进入身体内部,并且能够引导穿刺针的进针方向,当穿刺针的位置调节完成后可以实时检测出穿刺针的穿刺深度和穿刺针头到达身体表皮的竖直深度,方便医生了解穿刺针的位置和深度,并且在穿刺针进入的时候能够进行消毒穿刺针的表面能够防止穿刺针的表面产生交叉感染,增加了穿刺针使用时的安全性,并且进针器可以进行固定角度的设置,能够保证穿刺针在进行穿刺移动的稳定性;
(2)进针柱可以接触穿刺针表面的设置能够使穿刺针稳定进入身体,并且随着穿刺针进入的时候能够控制进针柱进行旋转,达到传送带的移动速度和穿刺针进入速度一致的效果,使得穿刺针的穿刺深度能够从长度板上显示的效果,并且进针柱在进行旋转的时候能够将穿刺针的穿刺深度和穿刺长度之间形成对比,使穿刺深度能够对比在立柱上,立柱表面滑动的标识块能够显示出穿刺深度。
附图说明
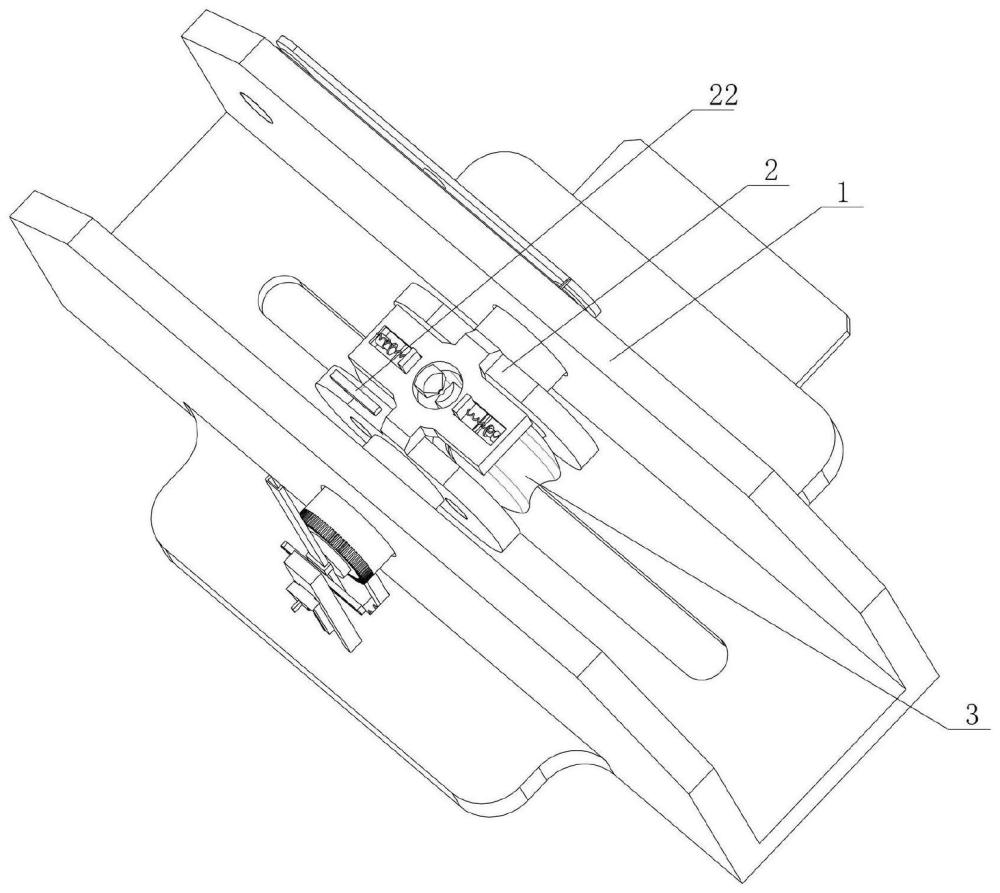
图1为本发明整体结构示意图;
图2为本发明长度板示意图;
图3为本发明立柱示意图;
图4为本发明器体中部剖面示意图;
图5为本发明旋转件中部切割示意图;
图6为本发明进针柱中部切割示意图;
图7为本发明擦拭轮支撑示意图;
图8为本发明移动条中部切割示意图;
图9为本发明旋转件传动示意图;
图10为本发明带动齿轮单侧示意图;
图11为本发明标识块示意图;
图12为本发明单向机构示意图;
图13为本发明按压板底部切割示意图。
图中:1、器体;2、旋转件;3、进针柱;4、长度板;5、边轮;6、传送带;7、中部轮;8、内部带;9、带动齿轮;10、移动条;11、标识块;12、立柱;13、插槽;14、原点块;15、侧块;16、竖块;17、擦拭轮;18、挤压柱;19、侧向通道;20、内部通道;21、按压板;22、拔出片;23、圆柱;24、单向块;25、单向齿。
具体实施方式
有关本发明的前述及其他技术内容、特点与功效,在以下配合参考附图1至图13对实施例的详细说明中,可清楚的呈现,以下实施例中所提到的结构内容,均是以说明书附图为参考。
本实施例提供多角度神经阻滞穿刺针进针器,如附图1-13所示,本器体1在进行使用的时候需要底部放置在穿针表面,也可以将器体1粘接在人体上,下边介绍本方案的穿刺长度和穿刺深度,穿刺长度就是穿刺针进入人体的长度,而穿刺深度近视穿刺针针头到达人体表面的竖直深度(这种情况针对的时候穿刺针与人体表面产生倾斜角度的时候,而竖直角度时穿刺长度和穿刺深度的数值为一致),本方案具有两个进针柱3,一个进针柱3的一侧具有一个皮带轮,和内部带8进行搭接,另一个进针柱3的一侧具有一个齿轮,这个齿轮和带动齿轮9进行啮合,如说明书附图9所示,而进针柱3也为本方案的核心点,两个进针柱3之间刚好可以穿过穿刺针,穿刺针的直径较大于进针柱3之间的宽度,进针柱3采用橡胶材料,具有一定的摩擦力,穿刺针进入的时候可以带动进针柱3进行旋转,先介绍第一个进针柱3,该进针柱3进针的时候旋转的线速度和穿刺针的行走速度为一致,最终转化到长度板4上进行显示,本方案的目的就是穿刺针的行走距离就是该时间短传送带6移动的距离(本方案并不介绍这些旋转零件之间的传动比,但本方案最终设计就是一段时间穿刺针的移动距离和传送带6一段时间移动的距离是一致的),而传送带6上可以插接有原点块14可以显示一段时间的初始位置和最终位置,中部轮7一侧搭接内部带8,另一侧搭接输送带,再介绍第二个进针柱3,这个进针柱3的旋转端的一侧具有一个齿轮,这个齿轮是和带动齿轮9啮合的,带动齿轮9两侧均具有齿轮,带动齿轮9转动设置于旋转件2的一侧,最终目的就是在穿刺针进入身体的时候会带动移动条10朝着下方进行移动,上方我们介绍了穿刺针的行走距离就是该时间段传送带6移动的距离,这里我们利用的为比例对比和三角函数,先介绍比例对比,移动条10的移动距离和穿刺针的穿刺长度具有一定的比例关系,移动条10的长度远远小于穿刺针的长度,这个比例关系数值是固定的,移动条10的移动距离成比例的代表了穿刺针的穿刺长度,穿刺针的穿刺长度和穿刺针的穿刺深度之间的关系就是三角函数关系,移动条10和立柱12形成的夹角为A,穿刺针的穿刺深度比穿刺针的穿刺长度就为cosA,而本方案的穿刺针的穿刺深度比穿刺针刚好组成了一个直角三角形,不需要知道夹角A的角度就显示了穿刺深度,立柱12上边的宽度线并不是实际刻度线,是成比例的刻度线,而长度板4上的刻度线为实际刻度线,标识块11的一侧具有槽口可以与圆柱23进行滑动,下边介绍消毒功能,消毒功能是因为挤压柱18的一侧具有消毒液体,而挤压柱18和旋转件2之间密封处理,穿刺针在进行进入的时候会挤压两侧的侧块15,侧块15会控制竖块16向下移动(使擦拭轮17接触到进针柱3,擦拭轮17转动设置于侧块15的下表面,并且是侧向通道19和内部通道20进行连通,竖块16的一侧和旋转件2也为密封处理,就是有密封组件,擦拭轮17表面为海绵),然后控制挤压柱18挤压消毒液体,将消毒液体挤压到擦拭轮17上,擦拭轮17再对进针柱3进行消毒,而且进针柱3在进行旋转的时候可以带动擦拭轮17旋转,最终介绍本方案在使用时候的准备功能,在本方案使用之前,需要按压按压板21,按压板21按压的时候可以使底部一个长口打开,在这直接针头已经穿过进针柱3顶在挤压板的上表面,而且具有角度插入穿刺针的时候需要先调节旋转件2的角度,然后按压按压板21(如说明书附图13所示),按压板21按压可以顶动一侧的一个L件,该L件是滑动在器体1一侧的,L件的上方可以固定插接在旋转件2的一侧形成固定(旋转件2的一侧具有扇形卡接槽可以形成插接固定,完成对旋转件2的角度固定,而角度固定后,在单向机构的作用下使圆柱23卡住移动条10上(如说明书附图12所示),这时准备工作均完成,这时可以完成一处地方的插接两侧地方的拔出,一处地方的插接就是原点块14插接到长度板4上方一侧的起到对应的插槽13上,插槽13为若干个,两侧地方的拔出就是标识块11一侧的块(如说明书附图11所示),这个块可以将标识块11固定在立柱12的顶部起点,拔出移动条10移动的时候就可以带动标识块11竖直向下移动,另一处拔出就是拔出片22,拔出片22插接在旋转件2上,插接的时候自身摩擦使得穿刺针在进针的时候无法控制进针柱3旋转,拔出以后就可以带动进针柱3移动(如说明书附图9所示),而穿刺针进行移动就插接在人体表皮上了,这时标识块11处在竖直原点,原点块14处在横向原点),而按压板21的两侧具有两个弹块能够在按压的时候卡住器体1的两侧,包括器体1,器体1的中部转动设置有可旋转的旋转件2,旋转件2的中部设置有可与针头接触的进针柱3,器体1的一侧设置有可测量穿刺长度的长度测量机构,器体1的另一侧设置有可测量竖直穿刺深度的深度测量机构,旋转件2的上表面设置有进针消毒机构,进针柱3转动设置于旋转件2的中部,长度测量机构包括长度板4、边轮5、传送带6、中部轮7和内部带8,长度板4固定设置于器体1的一侧,进针柱3的一侧传动设置有内部带8,深度测量机构包括带动齿轮9、移动条10、单向机构和标识块11,带动齿轮9的一侧啮合有移动条10,移动条10的一侧通过单向机构搭接有标识块11,器体1的上表面固定连接有立柱12,立柱12的表面滑动设置有标识块11,内部带8的表面传动有中部轮7,中部轮7的一端传动有传送带6,传送带6的表面搭接有边轮5,边轮5转动设置于器体1的一侧,传送带6的外表面开设有插槽13,插槽13的表面插接有原点块14,进针消毒机构包括侧块15、竖块16、擦拭轮17、挤压柱18、侧向通道19和内部通道20,侧块15滑动设置于旋转件2的中部,竖块16通过弹簧安装于旋转件2的下表面,竖块16的下表面转动设置有擦拭轮17,内部通道20设置于竖块16的内部,侧向通道19设置于旋转件2的内部,单向机构包括圆柱23、单向块24和单向齿25,单向块24通过弹簧安装于圆柱23的内侧壁,单向齿25设置移动条10的下侧,圆柱23滑动设置于标识块11,器体1的一侧设置有可按压的按压板21,按压板21按压可固定旋转件的角度2,旋转件2的上表面插接有拔出片22,进针柱3的数量为两个。
上面所述只是为了说明本发明,应该理解为本发明并不局限于以上实施例,符合本发明思想的各种变通形式均在本发明的保护范围之内。
- 穿刺针进针装置、驱动进针装置、穿刺机器人及进针方法
- 一种用于神经阻滞穿刺针的固定器