制动转向期间的纵向控制反馈补偿
文献发布时间:2023-06-19 19:23:34
相关申请的交叉引用
本申请要求2021年10月18日提交的美国临时申请序列号63/257,048的提交日的权益。
技术领域
本公开大体上涉及的领域包括转向、制动和推进系统。
背景技术
车辆可包括转向系统,包括采用了线控转向技术或制动转向(brake-to-steer)技术的电子动力转向系统。具有起作用的转向系统的车辆可以在施加转向输入时保持恒定的速度。在制动转向场景中,应用制动以转向车辆可引起车辆减速。同时,驾驶员输入可能需要减速或对车辆速度或加速度的其他改变。在驾驶员制动输入和制动转向输入期间,可以通过选择适当的变速器档位来实现最优的车轴扭矩控制。
发明内容
在转向故障期间,具有不同扭矩的各个车轮上的制动可用于经由制动转向来使车辆横向转向。在制动转向场景中,应用制动以转向车辆会导致车辆中的不希望的快速减速。可以通过选择适当的变速器档位或换挡传动比的等效物以实现基于当前车辆速度的最优发动机速度或电动机速度和扭矩,来实现更自然的减速感觉(例如当车辆滑行并由于自然力减速时)。
多个说明性变型可包括一种系统,该系统包括制动转向系统,该制动转向系统可以实现车辆的横向控制而无需纵向补偿。制动转向功能可能迫使车辆在能够实现适当的横向运动之前过快地、不均匀地或不舒适地减速。制动转向功能会为车辆乘客带来不自然的驾驶体验。通过执行车辆的闭环纵向控制,同时基于当前车速最优地选择适当的变速器档位或传动比的等效换档以实现最优的发动机速度或电动机速度和扭矩,从而辅助纵向控制并由此减少不合期望的纵向扰动,可以实现制动转向期间的更自然感觉的减速。
多个变型可以包括非暂时性计算机可读介质,其上具有可由电子处理器执行以实现包括以下内容的功能的指令:在驾驶员意图计算模块中接收车辆速度数据、加速器控制器位置数据和动力系状态数据;经由所述驾驶员意图计算模块来产生期望的车辆速度请求;将期望的车辆速度请求传送到纵向运动学运动控制器和变速器换档请求模块;经由所述纵向运动学运动控制器来产生期望的纵向加速度请求;将期望的纵向加速度请求传送到纵向动态运动控制器;经由所述纵向动态运动控制器来接收转向故障状态;经由制动转向系统来接收转向故障状态,所述制动转向系统被构造并设置成产生至少一个制动扭矩命令和至少一个前馈推进扭矩命令;将所述至少一个制动扭矩命令和所述至少一个前馈推进扭矩命令传送到最终纵向命令处理模块;产生至少一个推进扭矩请求或至少一个制动扭矩请求;将推进扭矩请求和制动扭矩请求传送到最终纵向命令处理模块;产生至少一个最终推进扭矩请求和至少一个最终制动扭矩请求;将所述至少一个最终推进扭矩请求和至少一个最终制动扭矩请求传送到至少一个车辆系统;测量车辆的纵向加速度;将测量的纵向加速度传送到所述纵向动态运动控制器;基于车辆的测量的纵向加速度来修改所述至少一个推进扭矩请求或至少一个制动扭矩请求,以形成推进扭矩请求和制动扭矩请求的闭环控制系统;经由变速器挡位或换挡请求模块来编码(codify)接收发动机速度数据或电动机速度和车轮速度数据;产生变速器挡位或换挡请求;以及,将所述变速器挡位或换挡请求传送到所述至少一个车辆系统。
从下文提供的详细描述中,本发明范围内的其他说明性变型将变得显而易见。应当理解,详细描述和具体示例虽然公开了本发明的变型,但仅旨在用于说明的目的,而没有限制本发明范围的意图。
附图说明
从详细描述和附图中,将更全面地理解本发明范围内的变型的选择示例,其中:
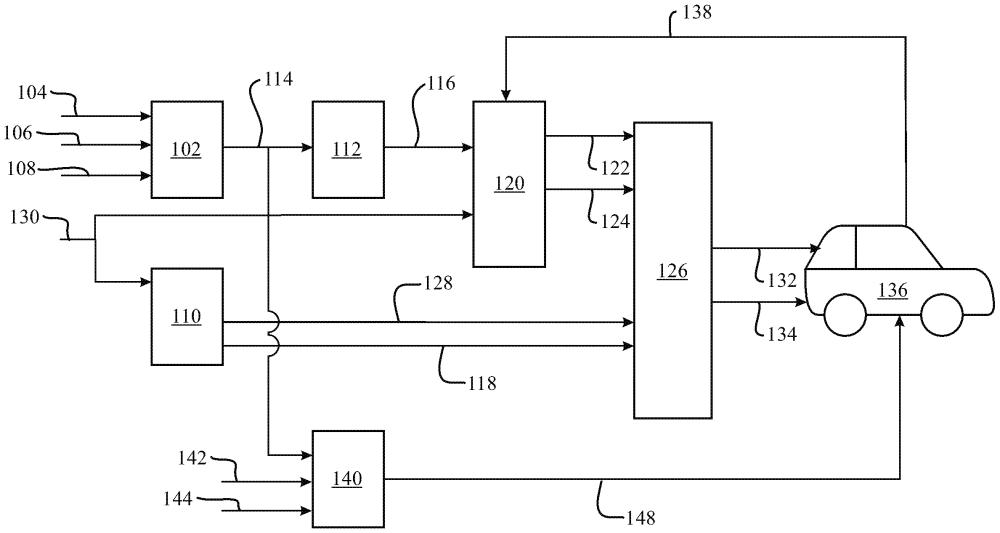
图1描绘了简化图的说明性变型,包括用于制动转向期间的纵向控制反馈补偿的系统和方法。
具体实施方式
以下对变型的描述本质上仅是说明性的,而绝非旨在限制本发明的范围、其应用或用途。
在多个说明性变型中,车辆可包括转向系统。在这种情况下,转向系统可以由驾驶员经由转向接口手动地可操作、由自主转向系统自动地可操作、或者可操作为自主和手动转向的组合,其中,转向系统被配置成同时接收和解释来自驾驶员、自主转向系统或两者的转向输入。在多个说明性变型中,转向接口可以包括手轮、操纵杆、跟踪球、滑块、节流阀、按钮、拨动开关、控制杆、触摸屏、鼠标、或任何其他已知的用户输入装置。
在多个说明性变型中,车辆可以包括转向系统,该转向系统包括转向接口和可转向推进系统,例如但不限于分别为方向盘和行走轮。转向系统可以是线控转向类型的,其中,物理机构不将转向接口的操纵机械地传送至可转向推进系统,并且其中,转向接口的操纵经由电子设备的通信而影响可转向推进系统的相关联操纵,电子设备例如但不限于传感器、收发器和电子激励致动器。根据一些变型,线控转向系统可以包括经由线控转向系统或控制器彼此可操作通信的至少一个行走轮致动器和至少一个手轮致动器。线控转向系统可以包括与手轮致动器系统可操作通信的行走轮致动器系统,其中,车辆的方向盘或手轮的旋转转化为行走轮致动器系统的致动,使得车轮可以转动。
手轮致动器组装件可以包括方向盘、例如电动机的手轮致动器、和手轮角度传感器。手轮致动器组装件可以被构造和设置成将手轮角度和位置传送到行走轮致动器组装件,行走轮致动器组装件包括被构造和设置成枢转或转动行走轮的至少一个转向致动器。
在多个说明性变型中,车辆可以包括电子制动系统,该电子制动系统被构造和设置成基于驾驶员手轮输入将制动扭矩施加到任何数量的行走轮以使车辆减速或停止。电子制动系统可以经由至少一个控制器与线控转向系统、手轮致动器组装件和行走轮致动器组装件可操作通信。例如计算设备的控制器可以实现任何数量的包括算法的系统,用于监视和控制推进、转向和制动。根据一些变型,电子制动系统可以用于将差动制动扭矩施加到多个车轮,以在线控转向系统的一部分失效的情况下实现车辆的横向运动,例如轮致动器组装件与行走轮致动器组装件之间的可操作断开。
在多个说明性变型中,电子制动系统可以利用包括制动转向算法的制动转向系统,该制动转向算法可以根据包括转向角、转向角速率和转向扭矩的驾驶员转向输入将制动扭矩请求传送到各个车轮以使车辆转向。当系统检测到行走轮致动器故障或关闭而导致转向齿条不能输出时,制动转向算法可以传送制动扭矩请求。或者,当系统检测到手轮致动器故障或关闭时,制动转向算法可以传送制动扭矩请求。
在多个示例性变型中,电子制动系统可以与机械制动系统可操作通信,机械制动系统可以包括例如但不限于制动钳、制动盘、衬片等的组件。在某些情况期间,电子制动系统与机械制动系统组合可以用于增加车辆安全性,例如在电子稳定性控制事件期间。如本文所用的,“制动扭矩”、“制动力”或“制动扭矩”以及这些术语的变型可以广义地指任何制动系统使车辆减速的动力或能力。
包括制动转向算法的制动转向功能可以实现车辆的横向控制而无需纵向补偿,但也会迫使车辆在可以实现适当的横向运动之前过快地减速。
根据一些变型,电子制动系统与制动转向系统组合可以将目标减速传送至包括纵向动态控制算法的纵向动态控制系统。纵向动态控制算法可以调节节流阀和制动扭矩,以在监视测量的纵向减速反馈的同时实现车辆中的目标减速。该系统可以监视测量的车辆速度并将命令传送到电子变速器控制模块,并根据需要改变变速器挡位或换挡传动比的等效物,以便保持期望的发动机速度或电动机速度和最优的发动机或电动机扭矩,从而克服与制动转向功能相关联的快速减速。
例如经由加速踏板、操纵杆滑块、可转动旋钮、手控或制动踏板、操纵杆滑块、可转动旋钮、手控的驾驶员加速和减速控制器输入可以通过调整纵向动态控制算法内的目标速度或加速度来计及。纵向动态控制反馈控制机构通过提供瞬时前馈动力系扭矩请求来辅助与制动转向功能相关联的纵向扰动。
作为一个非限制性示例,驾驶员或自主驾驶系统可以利用线控转向或类似的转向系统来驾驶车辆。转向系统可能会失效,并且制动转向功能可经由至少一个控制器被激活。前馈补偿系统可以提供动力系扭矩请求,以在制动转向期间使车辆的减速最小化。纵向动态控制系统可以测量纵向加速度并提供动力系扭矩请求以保持规定的车辆减速目标。纵向动态控制系统可以另外监视发动机或电动机每分钟转数,并且提供变速器挡位或换挡请求以保持期望的发动机或电动机每分钟转数,使得发动机或电动机扭矩保持在最优目标值。在附加的驾驶员制动输入的情况下,主要和次要纵向控制功能可以相应地调整动力系扭矩请求、减速目标、期望的发动机或电动机每分钟转数、以及变速器挡位或换挡请求。以此方式,车辆可以执行制动转向横向操纵,同时以直观的方式保持车辆速度、加速或减速,并且模仿自然驾驶体验的感觉。
用于车辆中的纵向控制反馈补偿的系统可以在车辆环境内的任何数量的控制器上实现,例如但不限于,管理制动转向功能的控制器、域控制器、或致动器控制器,包括线控转向操作或行走轮致动器故障期间的制动电子控制单元和转向手轮致动器。用于车辆中的纵向控制反馈补偿的系统可以在各种其他控制器上实现,包括但不限于动力系控制模块、变速器控制单元、或车身控制模块。该系统可以与具有机械齿轮的变速器、连续可变变速器、电子变速器、或能够执行换档档位的等效物的其他推进设备一起使用。
图1是简化图示。各种系统或算法的功能可以由位于车辆中任何地方的一个或多个控制器执行。图1中呈现的框图是可驻留在任何数量的控制器中的逻辑架构的一个描绘。一个或多个算法可以由一个或多个电子处理器使用和执行,以实现本文所述的方法、动作和功能。本文描述的每个系统、控制器和变型可以包括非暂时性计算机可读介质,其上具有可由电子处理器执行以实现本文描述的功能、方法、动作、步骤和行动的指令。
图1描绘了管理制动转向期间的车辆中的纵向扰动的系统和方法的框图的一个说明性变型,其可包括纵向动态运动控制器120,其被构造和设置成将推进扭矩请求122和制动扭矩请求124传送到最终纵向命令处理模块126。制动转向系统110可以从电子动力转向系统接收转向故障状态130,并将制动扭矩命令128和前馈、开环或即时推进扭矩命令118传送到最终纵向命令处理模块126。纵向动态运动控制器120还可以从电子动力转向系统接收转向故障状态130。纵向动态运动控制器120可以另外从纵向运动学运动控制器112接收期望的纵向加速度请求116。纵向运动学运动控制器112可以从驾驶员意图计算模块102接收期望的车辆速度请求114。驾驶员意图计算模块102可以接收车辆数据,例如但不限于车辆速度104、加速器控制器位置数据106和动力系状态数据108。这样,车辆速度数据104、加速器控制器位置数据106和动力系状态数据108可以与转向故障状态130组合以产生可以被传送到最终纵向命令处理模块126的推进扭矩请求122和制动扭矩请求124。
最终纵向命令处理模块126可以利用推进扭矩请求122、制动扭矩请求124、制动扭矩命令128和前馈、开环或即时推进扭矩命令118来产生最终推进扭矩请求132和最终制动扭矩请求134,其可被传送到适当的车辆系统136,例如但不限于推进、转向、制动或变速器系统、控制单元、控制器、或与推进、转向、制动或变速器系统相关联的电子控制单元。最终纵向命令处理模块126可以经由合并的推进扭矩请求122、制动扭矩请求124、制动扭矩命令128和前馈、开环或即时推进扭矩命令118产生最终推进扭矩请求132和最终制动扭矩请求134。车辆系统136可以将测量的纵向加速度138传送到作为闭环控制系统的一部分的纵向动态运动控制器120。纵向动态运动控制器120可以计算车辆内的目标加速度116和测量加速度138之间的差,以结合最终纵向命令处理模块126产生最终推进扭矩请求132和最终制动扭矩请求134。变速器档位请求模块140可以接收期望的车辆速度数据114、发动机速度或电动机速度142和车轮速度144,并且计算传送到车辆系统136的变速器档位请求148,以有助于车辆内的变速器档位改变或推进换档,从而保持目标发动机速度或电动机速度和发动机或电动机扭矩,由此减少车辆内的不合期望的纵向扰动。
根据一些变型,可以通过调整期望的车辆速度114或目标纵向加速度116来计及驾驶员输入,例如加速或减速输入。
以下对变型的描述仅是对被认为在本发明的范围内的组件、元件、动作、产品和方法的说明,而不是以任何方式旨在通过具体公开或未明确阐述的内容来限制这样的范围。本文所述的组件、元件、动作、产品和方法可以不同于本文明确描述的方式组合和重新设置,并且仍被认为是在本发明范围内。
根据变型1,一种用于在车辆中使用的方法可以包括:在驾驶员意图计算模块中接收车辆速度数据、加速器控制器位置数据和动力系状态数据;经由所述驾驶员意图计算模块来产生期望的车辆速度请求;将期望的车辆速度请求传送到纵向运动学运动控制器和变速器档位请求模块;经由所述纵向运动学运动控制器来产生期望的纵向加速度请求;将期望的纵向加速度请求传送到纵向动态运动控制器;经由所述纵向动态运动控制器来接收转向故障状态;经由制动转向系统来接收转向故障状态,所述制动转向系统被构造并设置成产生至少一个制动扭矩命令和至少一个前馈推进扭矩命令;将所述至少一个制动扭矩命令和所述至少一个前馈推进扭矩命令传送到最终纵向命令处理模块;产生至少一个推进扭矩请求或至少一个制动扭矩请求;将推进扭矩请求和制动扭矩请求传送到最终纵向命令处理模块;产生至少一个最终推进扭矩请求和至少一个最终制动扭矩请求;将所述至少一个最终推进扭矩请求和至少一个最终制动扭矩请求传送到至少一个车辆系统;测量车辆的纵向加速度;将测量的纵向加速度传送到所述纵向动态运动控制器;基于车辆的测量的纵向加速度来修改所述至少一个推进扭矩请求或至少一个制动扭矩请求,以形成推进扭矩请求和制动扭矩请求的闭环控制系统;经由变速器挡位或换挡请求模块来接收发动机速度或电动机速度数据和车轮速度数据;产生变速器挡位或换挡请求;以及,将所述变速器挡位请求传送到所述至少一个车辆系统。
变型2可包括如变型1中的用于在车辆中使用的方法,其中,所述至少一个车辆系统是变速器控制单元。
变型3可包括如变型1或2所述的用于在车辆中使用的方法,还包括改变车辆内的变速器档位以保持目标发动机速度或电动机速度以及发动机或电动机扭矩。
变型4可包括如变型1至3中任一项所述的用于在车辆中使用的方法,其中,改变变速器档位有助于减少车辆内的不合期望的纵向扰动。
变型5可包括如变型1至4中任一项所述的用于在车辆中使用的方法,其中,产生至少一个最终推进扭矩请求和至少一个最终制动扭矩请求包括合并推进扭矩请求、制动扭矩请求、制动扭矩命令、和前馈推进扭矩命令。
变型6可包括如变型1至5中任一项所述的用于在车辆中使用的方法,其中,将所述至少一个最终推进扭矩请求和至少一个最终制动扭矩请求传送到至少一个车辆系统包括:将所述至少一个最终推进扭矩请求传送到推进系统;以及,将所述至少一个最终制动扭矩请求传送到制动系统。
变型7可包括如变型1至6中任一项所述的用于在车辆中使用的方法,还包括在产生至少一个最终推进扭矩请求和至少一个最终制动扭矩请求之前产生目标发动机速度或电动机速度和目标发动机或电动机扭矩。
变型8可包括如变型1至7中任一项所述的用于在车辆中使用的方法,其中,所述至少一个车辆系统是变速器控制单元。
变型9可包括如变型1至8中任一项所述的用于在车辆中使用的方法,还包括改变车辆内的变速器档位以保持目标发动机速度或电动机速度以及发动机或电动机扭矩。
变型10可包括如变型1至9中任一项所述的用于在车辆中使用的方法,其中,改变车辆内的变速器档位以保持目标发动机速度或电动机速度以及发动机或电动机扭矩发生在制动转向事件期间。
根据变型11,一种用于在车辆中使用的方法可包括:在驾驶员意图计算模块中接收车辆速度数据、加速器控制器位置数据和动力系状态数据;经由所述驾驶员意图计算模块产生期望的车辆速度请求;将期望的车辆速度请求传送到纵向运动学运动控制器和变速器换档请求模块;经由所述纵向运动学运动控制器产生期望的纵向加速度请求;将期望的纵向加速度请求传送到纵向动态运动控制器;经由纵向动态运动控制器接收转向故障状态;经由制动转向系统接收转向故障状态,所述制动转向系统被构造并设置成产生至少一个制动扭矩命令和至少一个前馈推进扭矩命令;将所述至少一个制动扭矩命令和所述至少一个前馈推进扭矩命令传送到最终纵向命令处理模块;产生至少一个推进扭矩请求或至少一个制动扭矩请求;将推进扭矩请求和制动扭矩请求传送到最终纵向命令处理模块;产生目标发动机速度或电动机速度和目标发动机电动机扭矩;产生至少一个最终推进扭矩请求和至少一个最终制动扭矩请求;将所述至少一个最终推进扭矩请求和至少一个最终制动扭矩请求传送到至少一个第一车辆系统;测量车辆的纵向加速度;将测量的纵向加速度传送到所述纵向动态运动控制器;基于车辆的测量的纵向加速度来修改至少一个推进扭矩请求或至少一个制动扭矩请求,以形成推进扭矩请求和制动扭矩请求的闭环控制系统;经由变速器换档请求模块来接收发动机速度数据或电动机速度和车轮速度数据;产生变速器换档请求;将变速器换挡请求传送到至少一个第二车辆系统;以及,在制动转向事件期间改变车辆内的变速器换档以保持目标发动机速度或电动机速度以及发动机或电动机扭矩。
变型12可包括如变型11中的用于在车辆中使用的方法,其中,所述至少一个第二车辆系统是变速器控制单元。
变型13可包括如变型11或12所述的用于在车辆中使用的方法,其中,产生目标发动机速度或电动机速度以及目标发动机或电动机扭矩取决于测量的车辆速度。
变型14可包括非暂时性计算机可读介质,其上具有可由电子处理器执行以实现包括以下各项的功能的指令:在驾驶员意图计算模块中接收车辆速度数据、加速器控制器位置数据和动力系状态数据;经由所述驾驶员意图计算模块产生期望的车辆速度请求;将期望的车辆速度请求传送到纵向运动学运动控制器和变速器档位请求模块;经由所述纵向运动学运动控制器产生期望的纵向加速度请求;将期望的纵向加速度请求传送到纵向动态运动控制器;经由纵向动态运动控制器接收转向故障状态;经由制动转向系统接收转向故障状态,所述制动转向系统被构造并设置成产生至少一个制动扭矩命令和至少一个前馈推进扭矩命令;将所述至少一个制动扭矩命令和所述至少一个前馈推进扭矩命令传送到最终纵向命令处理模块;产生至少一个推进扭矩请求或至少一个制动扭矩请求;将推进扭矩请求和制动扭矩请求传送到最终纵向命令处理模块;产生至少一个最终推进扭矩请求和至少一个最终制动扭矩请求;将所述至少一个最终推进扭矩请求和至少一个最终制动扭矩请求传送到至少一个车辆系统;测量车辆的纵向加速度;将测量的纵向加速度传送到所述纵向动态运动控制器;基于车辆的测量的纵向加速度来修改至少一个推进扭矩请求或至少一个制动扭矩请求,以形成推进扭矩请求和制动扭矩请求的闭环控制系统;经由变速器挡位或换挡请求模块来接收发动机速度或电动机速度数据和车轮速度数据;产生变速器挡位或换挡请求;以及,将变速器挡位请求传送到至少一个车辆系统。
变型15可包括如变型14中的非暂时性计算机可读介质,其中,所述至少一个车辆系统是变速器控制单元。
变型16可包括如变型14或15所述的非暂时性计算机可读介质,还包括改变车辆内的变速器挡位以保持目标发动机速度或电动机速度以及发动机或电动机扭矩。
变型17可包括如变型14至16中任一项所述的非暂时性计算机可读介质,其中,改变变速器挡位有助于减少车辆内的不合期望的纵向扰动。
变型18可包括如变型14至17中任一项所述的非暂时性计算机可读介质,其中,产生至少一个最终推进扭矩请求和至少一个最终制动扭矩请求包括合并推进扭矩请求、制动扭矩请求、制动扭矩命令和前馈推进扭矩命令。
变型19可包括如变型14至18中任一项所述的非暂时性计算机可读介质,其中,将所述至少一个最终推进扭矩请求和至少一个最终制动扭矩请求传送到至少一个车辆系统包括:将所述至少一个最终推进扭矩请求传送到推进系统;以及,将所述至少一个最终制动扭矩请求传送到制动系统。
变型20可包括如变型14至19中任一项所述的非暂时性计算机可读介质,还包括在产生至少一个最终推进扭矩请求和至少一个最终制动扭矩请求之前产生目标发动机速度或电动机速度和目标发动机或电动机扭矩。
变型21可包括如变型14至20中任一项所述的非暂时性计算机可读介质,其中,所述至少一个车辆系统是变速器控制单元。
变型22可包括如变型14至21中任一项所述的非暂时性计算机可读介质,还包括改变车辆内的变速器档位以保持目标发动机速度或电动机速度以及发动机或电动机扭矩。
变型23可包括如变型14至22中任一项所述的非暂时性计算机可读介质,其中,改变车辆内的变速器档位以保持目标发动机速度或电动机速度以及发动机或电动机扭矩发生在制动转向事件期间。
在本发明范围内的选择变型的上述描述本质上仅仅是说明性的,因此,其变化或变型不应被认为是脱离本发明的精神和范围。
- 用于管理制动-转向期间的纵向扰动的前馈补偿
- 用于线控转向系统在制动转向回退期间经由方向盘的触觉驾驶员反馈