一种基于5G时空大数据协同的室内定位方法
文献发布时间:2023-06-19 19:35:22
技术领域
本发明属于电数字数据处理领域,具体涉及一种基于5G时空大数据协同的室内定位方法。
背景技术
随着数字化转型、智能升级、创新融合等发展策略的引导,室内位置服务需求日益迫切,如智能工厂内物流装备/移动终端定位、制造园区内移动终端定位、商场楼层导引等场景。目前室内定位主要基于UWB、蓝牙、WiFi指纹库、4G等技术,在定位设备(RFID、蓝牙网关等)的辅助下实现。一方面,由于UWB定位系统度高,蓝牙定位传输距离小,WiFi指纹库定位覆盖面积小,4G定位抗干扰能力弱等问题,以上方法的独立使用使得定位精度较差。另一方面,辅助定位设备的部署需求对环境要求高且需提前准备,无法实现大空间、突发性、恶劣环境下的室内定位。因此,本发明以5G时空大数据为基础,提出一种基于5G时空大数据协同的室内定位方法,结合数据协同设计5G时空大数据协同机制,实现不同定位数据的协同,提高最终定位结果精度。另外,该室内定位方法无需额外部署定位设备,可以满足大空间、突发性、恶劣环境下的室内定位。
发明内容
为解决上述技术问题,本发明提供一种基于5G时空大数据协同的室内定位方法,该方法针对无辅助定位设备的室内定位情况,基于5G时空大数据协同进行室内定位与位置追踪。获取时空大数据,将时空大数据按时空框架侧数据和时空变化侧数据进行划分,将划分后的数据分别输入到RBF神经网络模型进行训练,将训练结果的多个超参数作为位置点的指纹特征,以这些指纹特征搭建多维指纹数据库,进而实现室内定位及追踪。本发明涵盖了设计5G时空大数据协同机制、搭建基于5G时空大数据协同的多维指纹库、实现室内环境实时定位、实现移动终端室内环境轨迹追踪,能有效解决用户在室内无辅助定位设备情况下难以获得精确位置的难题,在一定程度上为各种以室内定位技术为基础的服务功能提供全面技术支撑。
为达到上述目的,本发明采用的技术方案为:
一种基于5G时空大数据协同的室内定位方法,包括如下步骤:
步骤(1)、基于5G时空大数据的协同机制对时空框架侧数据和时空变化侧数据进行定位解算,实现时空框架侧数据中时空基准数据、GPS数据与时空变化侧数据中WiFi、5G网络中定位参考信号、信道探测参考信号、往返时间数据,以及MR信令数据的协同;
步骤(2)、基于协同机制搭建多维指纹库:通过5G时空大数据协同,将处理后的数据分别输入到径向基函数神经网络模型进行训练,并将训练结果的多个超参数作为位置点的指纹特征,以这些指纹特征搭建多维指纹数据库;
步骤(3)、基于时空位置解算的室内定位:基于获取的移动终端当前的时空大数据,将时空大数据位置解算后的指纹特征与指纹库进行匹配,将贝叶斯概率最大的位置点输出作为当前移动终端定位结果;
步骤(4)、基于时空阈值法的轨迹追踪:基于步骤(3)获取处于室内环境移动终端的位置,依据时空框架侧数据和时空变化侧数据,使用时空交互检验方法提取移动终端某一时刻的空间停留点;基于室内拓扑布局标记停留区域,通过短时间连续多次标记停留区域,实现室内环境下的移动终端轨迹追踪。
进一步地,所述步骤(1)具体包括:
步骤(1.1)获取时空框架侧数据和时空变化侧数据,所述时空框架侧数据包括时空基准数据、GPS数据,所述时空变化侧数据包括WiFi、PRS、SRS、RTT、DL-AoD、UL-AOA、MR和信令数据;
步骤(1.2)对时空框架侧数据以残差的加权平方和的最小化构建目标函数,对目标函数进行定位解算,获得独立定位结果;
步骤(1.3)对时空变化侧数据和时空框架侧数据共同以残差的加权平方和的最小化构建目标函数,将步骤(1.2)中时空框架侧数据独立定位结果与时空变化侧目标函数进行协同定位解算。
进一步地,所述步骤(2)具体包括:
步骤(2.1)面向移动终端获取时空框架侧数据和时空变化侧数据:收集移动终端RSS数据信息、样本点UE上传的MR数据和信令数据以及样本位于小区域中的位置坐标;
步骤(2.2)5G时空大数据清洗:对获取的5G时空大数据进行噪声清洗、无效数据剔除处理;
步骤(2.3)基于5G时空大数据协同的多维指纹数据库搭建:将步骤(2.2)处理后的时空大数据按时空框架侧数据和时空变化侧数据进行划分,将划分好的时空大数据分别输入到径向基函数神经网络进行训练;
步骤(2.4)基于步骤(2.3)获得训练好的径向基函数神经网络模型超参数,将移动终端各个位置点的多个超参数作为该位置点的指纹特征,以这些指纹搭建多维指纹数据库。
进一步地,所述步骤(3)具体包括:
步骤(3.1)获取移动终端5G时空大数据:将移动终端在实时定位阶段上报的小区电平、RSS数据、TA+AOA数据通过步骤(1)的数据协同机制进行数据协同,形成该测量点的特征向量,从而确定状态空间;
步骤(3.2)实时匹配定位:基于数据协同后形成的当前测量点的特征向量,通过指纹库中的神经网络超参数进行与特征向量的最佳识别与匹配,实现移动终端的精准定位。
进一步地,所述步骤(4)具体包括:
步骤(4.1)基于时空阈值法的停留点与运动点识别:利用协同机制处理后的时空框架侧数据和时空变化侧数据,采用动态时空阈值算法,在合适的定位频率下根据相邻两次定位结果的空间距离识别停留点和运动点;
步骤(4.2)基于用户室内拓扑布局的停留区域标记:针对识别出的停留点,结合预先采集的用户室内拓扑与布局地图,再结合协同机制处理后的包含空间位置信息的数据的定位参考信号进行停留区域标记,判断停留区域场景;
步骤(4.3)基于步骤(4.2)判断出的停留区域场景,进行短时间连续多次判断停留区域,进而描绘出用户室内运动轨迹,实现移动终端室内环境轨迹追踪。
本发明与现有技术相比的优点在于:
相比于传统室内定位方法,高度依赖辅助定位设备且定位精度不高的方法,本发明提供一种基于5G时空大数据协同的室内定位方法,该方法针对传统室内定位方法的局限性,以5G时空大数据为基础,依托5G网络空间覆盖范围广、传输速率快等特点,进行数据协同,获得定位结果。获取时空大数据,将时空大数据按时空框架侧数据和时空变化侧数据进行划分,将划分后的数据分别输入到RBF径向基函数神经网络模型进行训练,将训练结果的多个超参数作为位置点的指纹特征,以这些指纹特征搭建多维指纹数据库,进而实现室内定位及追踪。能有效解决用户在室内无法获得精确位置的难题,在一定程度上为各种以室内定位技术为基础的服务功能提供全面技术支撑。
附图说明
图1为本发明的一种基于5G时空大数据协同机制的流程框图;
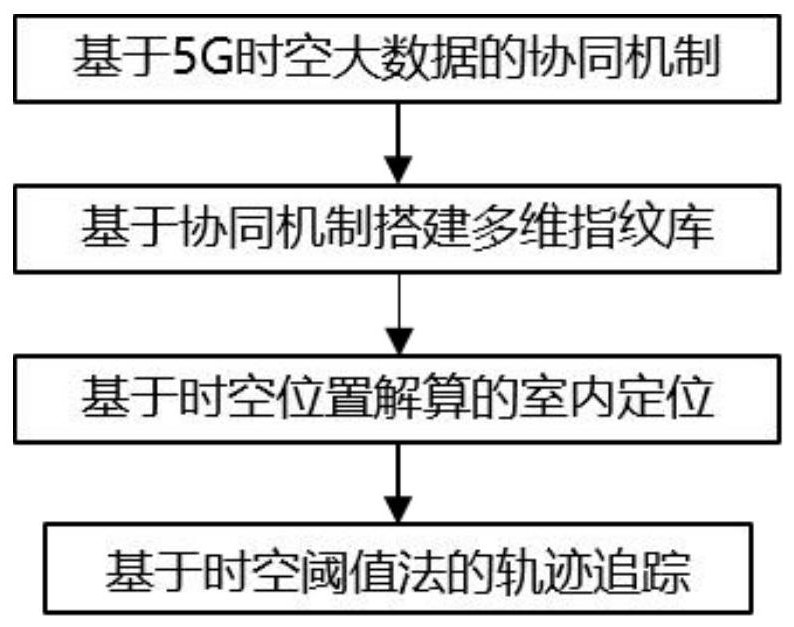
图2为本发明的一种基于5G时空大数据协同的室内定位方法的流程框图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
如图2所示,本发明的一种基于5G时空大数据协同的室内定位方法,具体包括如下步骤:
步骤(1)、基于5G时空大数据的协同机制对时空框架侧数据和时空变化侧数据进行定位解算,实现时空框架侧数据中时空基准数据、GPS数据与时空变化侧数据中WiFi、5G网络中PRS(定位参考信号)、SRS(信道探测参考信号)、RTT(往返时间)数据,以及MR信令等数据的协同;
步骤(2)、基于协同机制搭建多维指纹库:通过5G时空大数据的协同,将处理后的数据分别输入到RBF(径向基函数)神经网络模型进行训练,并将训练结果的超参数作为位置点的多个指纹特征,以这些指纹特征搭建多维指纹数据库;
步骤(3)、基于时空位置解算进行室内定位:基于获取的移动终端当前的时空大数据,将时空大数据位置解算后的指纹特征与指纹库进行匹配,将贝叶斯概率最大的位置点输出作为当前移动终端定位结果;
步骤(4)、基于时空阈值法进行轨迹追踪:基于步骤(3)获取处于室内环境移动终端的位置,依据时空框架侧数据和时空变化侧数据,使用时空交互检验方法提取移动终端某一时刻的空间停留点。基于室内拓扑布局标记停留区域,通过短时间连续多次标记停留区域,实现室内环境下的移动终端轨迹追踪。
具体地,如图1所示,所述步骤(1)包括:
步骤(1.1)获取时空框架侧数据和时空变化侧数据,所述时空框架侧数据包括时空基准数据、GPS数据,所述时空变化侧数据包括WiFi、PRS、SRS、RTT、DL-AoD、UL-AOA、MR和信令数据;
步骤(1.2)对时空框架侧数据以残差的加权平方和的最小化构建目标函数,对目标函数进行定位解算,获得独立定位结果;
步骤(1.3)对时空变化侧数据和时空框架侧数据共同以残差的加权平方和的最小化构建目标函数,将步骤(1.2)中时空框架侧数据独立定位结果与时空变化侧目标函数进行协同定位解算。
具体地,所述步骤(2)包括:
步骤(2.1)面向移动终端获取时空框架侧数据和时空变化侧数据。收集移动终端RSS数据信息、样本点UE上传的MR数据和信令数据以及样本位于小区域中的位置坐标;
步骤(2.2)5G时空大数据清洗。对获取的5G时空大数据进行噪声清洗、无效数据剔除等处理;
步骤(2.3)基于5G时空大数据协同的多维指纹数据库搭建。将步骤(2.2)处理后的时空大数据按时空框架侧数据和时空变化侧数据进行划分,将划分好的时空大数据分别输入到RBF径向基函数神经网络进行训练;
步骤(2.4)基于步骤(2.3)获得训练好的径向基函数神经网络模型超参数,将移动终端各个位置点的多个超参数作为该位置点的多个指纹特征,以这些指纹搭建多维指纹数据库。
具体地,所述步骤(3)包括:
步骤(3.1)获取移动终端5G时空大数据。将移动终端在实时定位阶段上报的小区电平、RSS数据、TA+AOA等数据通过步骤(1)的数据协同机制进行数据协同,形成该测量点的特征向量,从而确定状态空间。
步骤(3.2)实时匹配定位。基于数据协同后形成的当前测量点的特征向量,通过指纹库中的神经网络超参数进行与特征向量的最佳识别与匹配,实现移动终端的精准定位。
具体地,所述步骤(4)包括:
步骤(4.1)基于时空阈值法的停留点与运动点识别。利用协同机制处理后的时空框架侧数据和时空变化侧数据,采用动态时空阈值算法,在合适的定位频率下根据相邻两次定位结果的空间距离识别停留点和运动点;
步骤(4.2)基于用户室内拓扑布局的停留区域标记:针对识别出的停留点,结合预先采集的用户室内拓扑与布局地图,再结合协同机制处理后的包含空间位置信息的数据的定位参考信号进行停留区域标记,判断停留区域场景;
步骤(4.3)基于步骤(4.2)判断出的停留区域场景,进行短时间连续多次判断停留区域,进而描绘出用户室内运动轨迹,实现移动终端室内环境轨迹追踪。
本发明的基于5G时空大数据协同机制具体包括:时空框架侧数据独立定位:获取时空框架侧数据,包括时空基准数据、GPS数据。基于这两种数据以残差的加权平方和的最小化构建目标函数,对目标函数采用牛顿迭代法进行定位解算,输出独立定位结果。时空变化侧数据侧融合定位:获取时空变化侧数据,包括WiFi、PRS、SRS、RTT、DL-AoD、UL-AOA、MR和信令数据等,结合时空框架侧数据以残差的加权平方和的最小化构建目标函数。将时空框架侧数据初定位结果与时空变化侧数据进行融合定位闭式解计算,输出定位结果进行准确性判断。若结果满足精度要求,则直接输出最终定位结果;若结果不满足精度要求,则采用数值解方法对定位结果与初始位置进行处理,输出最终定位结果。
综上所述,本发明提供一种基于5G时空大数据协同的室内定位方法,该方法针对室内定位精度不高且依赖辅助定位设备的情况,以5G时空大数据为基础,依托5G网络空间覆盖范围广、传输速率快等特点,进行数据协同,获得协同定位结果。获取移动终端时空大数据,将时空大数据按时空框架侧数据和时空变化侧数据进行划分,将划分后的数据分别输入到RBF径向基函数神经网络模型进行训练,将训练结果的多个超参数作为位置点的指纹特征,以这些指纹特征搭建多维指纹数据库,进而实现室内定位及追踪。本发明涵盖了设计基于5G时空大数据协同机制、搭建基于5G时空大数据协同的多维指纹库、实现室内环境实时定位、实现移动终端室内环境轨迹追踪,能有效解决用户在室内无法获得精确位置的难题,在一定程度上为各种以室内定位技术为基础的服务功能提供全面技术支撑。
本发明说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 基于大数据深度学习的个人时空协同预测方法和机器人
- 基于多级时空大数据深度学习的动态级联时空预测方法