一种基于道路交通环境复杂度分类分级计算方法
文献发布时间:2023-06-19 09:27:35
技术领域
本公开属于道路交通技术领域,特别涉及一种基于道路交通环境复杂度分类分级计算方法。
背景技术
驾驶行为的刺激感知来自交通环境,而交通环境是作用于道路交通参与者的所有外界影响与力量的总和,包括道路状况、交通设施、地物地貌、气象条件,以及其他交通参与者的交通活动等,但是这些道路状况、设施及条件在一定区间连续或离散变化,存在道路交通场景不可穷举的重大问题。
发明内容
有鉴于此,本公开提出了一种基于道路交通环境复杂度分类分级计算方法,能够以道路交通的基本要素为基础实现道路交通环境全覆盖,解决了构建道路交通场景不可穷举的重大问题;能够定量评估道路交通环境要素及复杂程度,为有人驾驶行为及无人驾驶智能行为分析提供定量评估依据,为车辆高级辅助驾驶和无人驾驶系统研究开发及测试评价提供定量技术支撑。
根据本公开的一方面,提出了一种基于道路交通环境复杂度分类分级计算方法,所述方法包括:根据所述道路交通环境地形及道路类别、道路交通环境标志、道路交通环境标线、道路交通环境附属设施和建筑绿化要素的复杂度的计权组合而成道路交通环境的静态要素复杂度;
根据道路交通环境天时类别、道路交通环境的交通参与者的复杂度的计权组合而成道路交通环境的动态要素复杂度;
根据道路交通环境的静态要素复杂度、道路交通环境的静态要素复杂度系数、道路交通环境的动态要素复杂度和道路交通环境的动态要素复杂度系数计算得到道路交通分类分级的环境复杂度。
在一种可能的实现方式中,所述道路交通环境地形及道路类别的复杂度由道路交通环境地形地貌类别、道路交通环境道路类别、道路交通环境道路区段类别、道路交通环境路面类别、道路交通环境车道数量的基本复杂度的计权组合而成;
所述道路交通环境标志的复杂度由警告标志、禁令标志、指示标志、一般道路指路标志、高速公路及城市快速路指路标志、旅游区标志、作业区标志、告示和辅助标志的基本复杂度的计权组合而成;
所述道路交通环境标线的复杂度由指示标线、禁止标线、警告标线的基本复杂度的计权组合而成;
所述道路交通环境附属设施和建筑绿化要素的复杂度由除交通标志和标线外的交通安全设施、服务设施、交通管理设施、道路附属设施、绿化工程、道路沿线的相关设施的基本复杂度的计权组合而成。
在一种可能的实现方式中,所述道路交通环境天时类别的复杂度由道路交通环境气象类别、道路交通环境气温类别、道路交通环境时间类别的基本复杂度的计权组合而成;
所述道路交通环境的交通参与者的复杂度由行人、非机动车、机动车、可变信息、动物的基本复杂度的计权组合而成。
本公开的基于道路交通环境复杂度分类分级计算方法,通过包括:根据所述道路交通环境地形及道路类别、道路交通环境标志、道路交通环境标线、道路交通环境附属设施和建筑绿化要素的复杂度的计权组合而成道路交通环境的静态要素复杂度;根据道路交通环境天时类别、道路交通环境的交通参与者的复杂度的计权组合而成道路交通环境的动态要素复杂度;根据道路交通环境的静态要素复杂度、道路交通环境的静态要素复杂度系数、道路交通环境的动态要素复杂度和道路交通环境的动态要素复杂度系数计算得到道路交通分类分级的环境复杂度。能够以道路交通的基本要素为基础实现道路交通环境全覆盖,解决了构建道路交通场景不可穷举的重大问题;能够定量评估道路交通环境要素及复杂程度,为有人驾驶行为及无人驾驶智能行为分析提供定量评估依据,为车辆高级辅助驾驶和无人驾驶系统研究开发及测试评价提供定量技术支撑。
根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
附图说明
包含在说明书中并且构成说明书的一部分的附图与说明书一起示出了本公开的示例性实施例、特征和方面,并且用于解释本公开的原理。
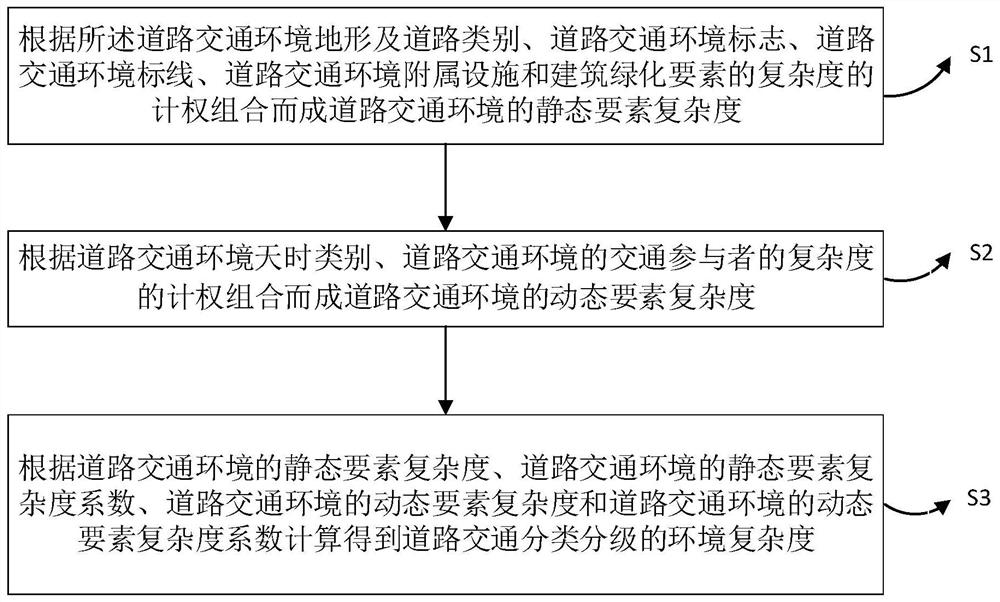
图1示出根据本公开一实施例的基于道路交通环境复杂度分类分级计算方法流程图。
具体实施方式
以下将参考附图详细说明本公开的各种示例性实施例、特征和方面。附图中相同的附图标记表示功能相同或相似的元件。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。
另外,为了更好的说明本公开,在下文的具体实施方式中给出了众多的具体细节。本领域技术人员应当理解,没有某些具体细节,本公开同样可以实施。在一些实例中,对于本领域技术人员熟知的方法、手段、元件和电路未作详细描述,以便于凸显本公开的主旨。
80%以上的交通环境刺激来自于视觉,以视觉刺激为输入,以不同复杂程度的交通环境产生不同的刺激感知为输出,依据有人驾驶行为及无人驾驶智能行为信息加工模型,定量评估道路交通环境要素及复杂程度,为有人驾驶行为及无人驾驶智能行为分析提供定量评估依据,为车辆高级辅助驾驶和无人驾驶系统研究开发及测试评价提供定量技术支撑。
本公开基于被测自动驾驶车辆驾驶视点(参照有人驾驶眼椭圆位置,以下均称视点)为基准,提出一种道路交通环境复杂度分类分级计算方法。该计算方法综合得出一系列系数指标,按道路交通静态要素和动态要素分类分级计算方法。道路交通静态要素综合了地形地貌、道路、道路区段、路面、车道数、平曲线、竖曲线、标志、标线和附属设施及建筑绿化10个类别,道路交通动态要素综合了气象、气温、时间和交通参与者4个类别,确定了各个类别基本复杂并以中华传统时辰定义时间类别,其中,时间类别突出了中国传统“时辰区间”统计分析分类并明确白天、夜间、上午、下午的20小时计时关系,如表1所示。
图1示出根据本公开一实施例的基于道路交通环境复杂度分类分级计算方法流程图。如图1所示,该方法可以包括:
步骤S1:根据道路交通环境地形及道路类别、道路交通环境标志、道路交通环境标线、道路交通环境附属设施和建筑绿化要素的复杂度的计权组合而成道路交通环境的静态要素复杂度。
道路交通环境静态要素复杂度C
C
其中,C
依据信息熵理论,道路交通环境静态要素复杂度信息熵系数如式(2)所示:
其中,
在一示例中,道路交通环境地形及道路类别的复杂度C
其中,
其中,道路交通环境地形地貌类别可以包括:平原、高原、山地、丘陵、盆地、戈壁、沙漠、海洋、湖泊、沼泽和江河等,则对应的基本复杂度分别为:20、35、65、50、30、40、55、70、75、80和80。
道路交通环境道路类别可以包括:高速公路、一级公路、二级公路、三级公路、四级公路、快速路、主干路、次干路、支路、辅路、服务区、收费站、停车场和广场等,则对应的基本复杂度分别为:20、30、40、50、60、30、40、50、60、50、50、60、75和80。
道路交通环境道路区段类别可以包括:直线路段、曲线路段、互通式立体交叉、分离式立体交叉、平面丁字交叉、平面Y型交叉、平面十字交叉、平面环形交叉、其他平面交叉、桥梁、涵洞和隧道等,则对应的基本复杂度分别为:20、50、65、35、80、80、80、65、70、50、40和65。
道路交通环境路面类别可以包括:沥青混凝土干燥路面、水泥混凝土干燥路面、沥青贯入干燥路面、沥青碎石干燥路面、水泥干燥路面、砂石干燥路面、干燥土路、干燥砌块路面、潮湿路面、积水路面、越野路和冰雪路等,则对应的基本复杂度分别为:25、20、30、35、30、25、50、60、70、65、70、70和80。
道路交通环境车道数量可以包括:双向十道以上、双向十车道、双向八车道、双向六车道、双向四车道、双车道、单车道和无车道,则对应的基本复杂度分别为:25、20、25、30、40、50、70和80。
道路交通环境道路平曲线类别可以包括:直线和平曲线,平曲线可以包括大弯、中弯、小弯、急弯和特急弯。其中,直线对应的基本复杂度为20,大弯、中弯、小弯、急弯和特急弯对应的基本复杂度分别为30、40、55、70和80。
道路交通环境道路竖曲线类别可以包括:水平、纵坡坡度、凸形竖曲线和凹形竖曲线,其中,纵坡坡度可以包括小纵坡、中纵坡、大纵坡、陡坡和特陡坡;凸形竖曲线可以包括平凸、较凸、特凸;凹形竖曲线可以包括平凹、较凹和特凹。水平对应的基本复杂度为20;小纵坡、中纵坡、大纵坡、陡坡和特陡坡对应的基本复杂度分别为30、40、55、70和80;平凸、较凸、特凸对应的基本复杂度分别为20、50和80;平凹、较凹和特凹对应的基本复杂度分别为20、50和80。
在一实例中,道路交通环境标志的复杂度可以由警告标志、禁令标志、指示标志、一般道路指路标志、高速公路及城市快速路指路标志、旅游区标志、作业区标志、告示和辅助标志的基本复杂度的计权组合而成。
例如,道路交通环境标志类别按道路交通标志复杂程度归为警告标志、禁令标志、指示标志、一般指路标志、高速公路及城市快速路指路标志、旅游区标志、作业区标志、告示和辅助标志、其他标志等9个大类,91个中类,319个小类,组成三个层次。如式(4)所示:
其中,
在一示例中,道路交通环境标线的复杂度由指示标线、禁止标线、警告标线的基本复杂度的计权组合而成。如式(5)所示,
其中,
在一示例中,道路交通环境附属设施和建筑绿化要素的复杂度由除交通标志和标线外的交通安全设施、服务设施、交通管理设施、道路附属设施、绿化工程、道路沿线的相关设施的基本复杂度的计权组合而成。如式(6)所示,
其中,
步骤S2:根据道路交通环境天时类别、道路交通环境的交通参与者的复杂度的计权组合而成道路交通环境的动态要素复杂度。
路交通环境动态要素复杂度C
C
其中,C
依据信息熵理论,道路交通环境动态要素复杂度信息熵系数如式(8)所示:
其中,
在一示例中,道路交通环境天时类别的复杂度由道路交通环境气象类别、道路交通环境气温类别、道路交通环境时间类别的基本复杂度的计权组合而成,如式(9)所示,
其中,
例如,道路交通环境气象类别可以包括晴、多云、阴、雨、雷、雪、雾、风和沙,则对应的基本复杂度分别为20、30、40、50、55、80、80、40和55。
道路交通环境气温类别可以包括极低温(极寒)、低温(齐寒和酷寒)、寒冷(严寒和深寒)、凉爽(清寒和寒凉)、温暖(温凉和暖热)、暑热(炎热和酷热)、高温(奇热)和极高温(极热),则极寒、齐寒、酷寒、严寒、深寒、清寒、寒凉、温凉、暖热、炎热、酷热、奇热、极热对应的基本复杂度分别为:80、65、60、50、45、40、35、30、35、40、45、50和55。
道路交通环境时间类别和其基本复杂度及代码如表1所示:
表1道路交通环境时间类别和基本复杂度及代码
在一示例中,道路交通环境的交通参与者的复杂度由行人、非机动车、机动车、可变信息、动物的基本复杂度的计权组合而成,如式(10)所示,
其中,
其中,行人可以分为小孩、大人、残疾人、人群4个中类。非机动车可以分为自行车、人力车、畜力车3个中类。机动车可以分为摩托车、快递三轮车、小型车、中型车、大型车5个中类。可变信息可以分为道路交通信号灯、可变信息标志、闪光标志3个中类。动物可以分为家禽、家畜、野生动物3个中类,加上其他共计19个中类;小类暂时不区分,组成三个层次。
步骤S3:根据道路交通环境的静态要素复杂度、道路交通环境的静态要素复杂度系数、道路交通环境的动态要素复杂度和道路交通环境的动态要素复杂度系数计算得到道路交通分类分级的环境复杂度。
道路交通环境复杂度C计算如式(11)所示,
C=αC
其中,C为道路交通环境复杂度;C
可以将步骤S1计算的道路交通环境静态要素复杂度和步骤S2计算的道路交通环境动态要素复杂度代入到式(11)中,便可得到道路交通环境复杂度。
本公开的基于道路交通环境复杂度分类分级计算方法,通过包括:根据所述道路交通环境地形及道路类别、道路交通环境标志、道路交通环境标线、道路交通环境附属设施和建筑绿化要素的复杂度的计权组合而成道路交通环境的静态要素复杂度;根据道路交通环境天时类别、道路交通环境的交通参与者的复杂度的计权组合而成道路交通环境的动态要素复杂度;根据道路交通环境的静态要素复杂度、道路交通环境的静态要素复杂度系数、道路交通环境的动态要素复杂度和道路交通环境的动态要素复杂度系数计算得到道路交通分类分级的环境复杂度。能够以道路交通的基本要素为基础实现道路交通环境全覆盖,解决了构建道路交通场景不可穷举的重大问题;能够定量评估道路交通环境要素及复杂程度,为有人驾驶行为及无人驾驶智能行为分析提供定量评估依据,为车辆高级辅助驾驶和无人驾驶系统研究开发及测试评价提供定量技术支撑。
以上已经描述了本公开的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
- 一种基于道路交通环境复杂度分类分级计算方法
- 一种适合现代战场的电磁环境复杂度计算方法