一种具备远程信息传输及定位功能的路况识别避障车
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及一种具备远程信息传输及定位功能的路况识别避障车,属于远程信息传输、定位以及控制技术领域。
背景技术
伴随着科技的进步和人民生活水平的提高,智能设备的发展已经逐渐改变了人们的生活习惯,人人都希望自己的设备能变得更加智能,以帮助自己在这个节奏很快的时代,能够更智能的去面对生活中的一些困难。
智能设备(intelligent device)是指任何一种具有计算处理能力的设备、器械或者机器。功能完备的智能设备必须具备灵敏准确的感知功能、正确的思维与判断功能以及行之有效的执行功能。智能设备是传统电气设备与计算机技术、数据处理技术、控制理论、传感器技术、网络通信技术、电力电子技术等相结合的产物。
现如今,中国已经成为全球老龄人口数量最多的国家,且老龄化程度仍在急剧增加。对应的,视力障碍者和出行不便者的数量也在急剧增加。训练一只导盲犬大概需要1年半的时间,花费大概需要10万元,成本极高且受限于犬与使用者的默契度。导盲犬常在超市等公共环境会受到管制,在新环境中作用也会受到限制。
显然能够代替导盲犬的智能设备将会改变盲人或视力受损残疾人的生活方式。我致力于提出一种路况识别避障车。该避障车能在随时变化的环境中进行调整且不易受公共环境的限制。价格便宜,使用方便且不易受环境干扰,并能在紧急情况发生时及时联系家属与报警。该发明将会极大改善盲人,视力低下者与老年人的出行质量。
发明内容
本发明的目的是为了能让更多视力低下或残障人士能够使用更低成本,更方便的设备以改善自己的生活质量,甚至能够恢复到和正常人基本持平的出行水平,同时提高路况识别和远程监控能力,进一步加强避障车实用性的同时,增强了使用者与家属的信息联络,提出了一种具备远程信息传输及定位功能的路况识别避障车。
本发明的核心思想是:使用者通过控制面板与主控中心模块建立联系,家属能够通过远程控制单元参与避障车的控制,并与使用者联络;使用者也能够通过控制面板自主设置以上信息。主控中心模块收到远程控制单元或控制面板的指令后通过导航模块执行规划路线,并控制车辆行驶模块驱动避障车以适合速度前进,并控制路况识别模块跟踪拍摄周围环境。行驶过程中主控中心模块不间断通过信息传输模块将使用者的实时信息上传到远程控制单元使家属或警方能够实时掌握使用者信息,同时主控中心模块通过路况识别模块等综合判断为使用者提供精准的避障服务。同时紧急模块能够根据使用者的反馈和避障车自身的状态判断是否需要启动紧急模式。
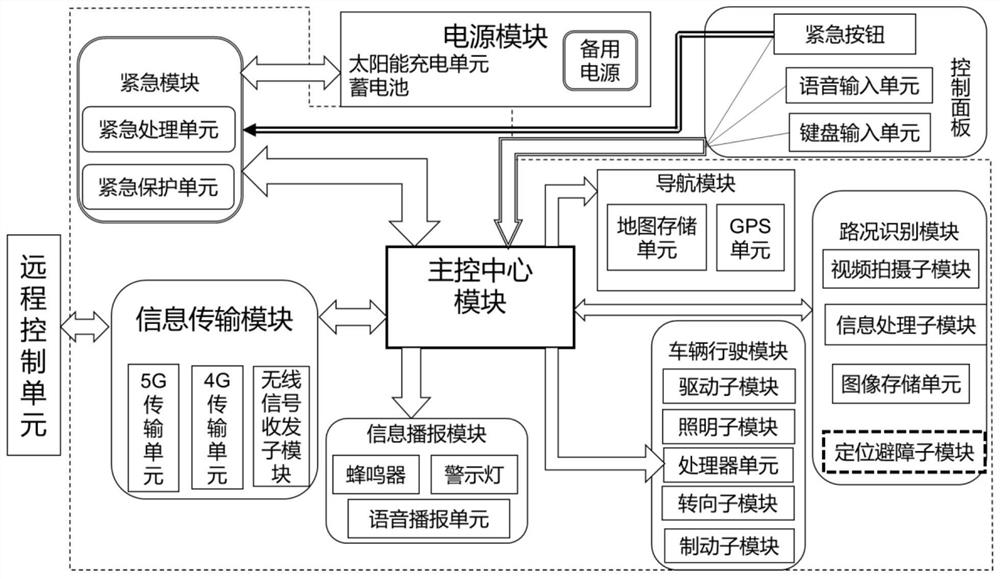
所述路况识别避障车包括:主控中心模块、导航模块、路况识别模块、车辆行驶模块、信息播报模块、信息传输模块、电源模块、紧急模块、远程控制单元以及控制面板;
其中,远程控制单元为载有APP的智能终端;智能终端为智能手机、电脑、IPAD以及其他移动设备中的一种;控制面板包括键盘输入单元、语音输入单元以及紧急按钮;电源模块包括蓄电池、太阳能充电单元以及备用电源;导航模块包括地图存储单元以及GPS单元;信息传输模块包括5G传输单元、4G传输单元以及无线信号收发子模块;路况识别模块包括视频拍摄子模块、图像存储单元以及信息处理子模块;视频拍摄子模块数量为n个,记为视频拍摄子模块1到视频拍摄子模块n,每一个视频拍摄子模块单独进行视频或图像的拍摄;车辆行驶模块包括处理器单元、驱动子模块、照明子模块、转向子模块以及制动子模块;驱动子模块的数量为k个,记为驱动子模块1到驱动子模块k;制动子模块的数量为m个,记为制动子模块1到制动子模块m;照明子模块的数量为p个,记为照明子模块1到照明子模块p;信息播报模块包括蜂鸣器、警示灯以及语音播报单元;紧急模块包括紧急处理单元以及紧急保护单元;
所述路况识别避障车中各模块与单元的连接关系如下:
电源模块与主控中心模块、导航模块、路况识别模块、车辆行驶模块、信息播报模块、信息传输模块、紧急模块、远程控制单元以及控制面板相连;主控中心模块与导航模块、路况识别模块、车辆行驶模块、信息播报模块、信息传输模块、电源模块、紧急模块、远程控制单元以及控制面板相连;路况识别模块中的视频拍摄子模块与图像存储单元相连,图像存储单元与信息处理子模块相连;信息处理子模块与主控中心模块相连;信息传输模块中,5G传输单元、4G传输单元和无线信号收发子模块相连;紧急模块中的紧急处理单元和紧急保护单元相连,同时连接到控制面板上的紧急按钮;信息播报单元中的蜂鸣器、警示灯以及语音播报单元分别独立与主控中心模块相连;
导航模块中GPS单元和地图存储单元相连,车辆行驶模块中驱动子模块、照明子模块、转向子模块以及制动子模块分别独立,并与处理器单元相连,处理器单元与主控中心模块相连;控制面板中的紧急按钮分别与紧急模块以及主控中心模块相连;电源模块中太阳能充电单元和蓄电池相连;
所述路况识别避障车中各模块的功能如下:
远程控制单元与信息传输模块中的无线信号收发子模块通信实时得到使用者所在地以及周围的情况;家属通过远程控制单元向主控中心模块下达指令,随后由主控中心模块根据指令对其他模块进行调控;远程控制单元在接收到紧急信息警告向家属和警方发出警示,并与警方共享位置信息和实时图像信息;
车辆行驶模块接收主控中心模块指令,处理器单元根据指令进行如下操作:
1)处理器单元接收到行进指令后,则使能驱动子模块工作,带动避障车行进;
2)处理器单元接收到补光指令后,启动照明子模块对环境进行照明补光;
3)处理器单元接收到转向指令后,启动转向子模块改变避障车行进方向;
4)处理器单元接收到刹车或紧急情况指令后,启动制动子模块使避障车减速;
GPS模块中GPS单元根据接收到的GPS信号与地图存储单元中的地图进行对比确定使用者所在的具体位置并传输至主控中心模块,主控中心模块再将接收到的“使用者所在的具体位置”传输到无线信号收发子模块,最终上传到远程控制单元;
视频拍摄子模块用于实时拍摄避障车周围的环境;图像处理子模块将拍摄到的图像经过拼接、去糊以及去噪处理后传输到主控中心模块。主控中心模块对图像信息进行减帧,压缩处理后存储到图像存储单元,当远程控制单元需要查看实时图像或在紧急模式时,主控中心模块调用图像存储单元内的图像信息,经由信息传输模块上传到远程控制单元;
无线信号收发子模块接收主控中心模块的信息,再将接收到的信息上传到远程控制单元;4G传输单元用于信息传输量小且速率要求不高情况下的信息传输;5G传输单元用于信息传输量大、速率要求高或以及紧急模式下快速上传主控中心模块传输来的信息给远程控制单元;
紧急模块针对接收到主控中心模块的紧急信息进行处理;紧急处理单元处理信息判断紧急情况类别;紧急保护单元则会根据紧急情况的类别进行决策,向主控中心模块下达进一步行动指令;
信息播报模块接收主控中心模块的指令,进行如下操作:
1)信息播报模块接收到语音播报指令后,语音播报单元按指令播报对应信息;
2)信息播报模块接收到蜂鸣器警示指令后,蜂鸣器鸣响;
3)信息播报模块接收到警示灯闪烁指令后,警示灯按指令闪烁或常亮;
所述避障车的工作模式包括预设目的地模式、使用者自定义路线模式以及紧急模式;
其中,预设目的地模式、使用者自定义路线模式为日常工作模式;
预设目的地模式,包括如下步骤:
步骤一:使用前避障车自检,若出现异常情况,则主控中心模块通过信息传输模块将避障车自检异常情况传至远程控制单元,并启动信息播报模块中的语音播报子模块提醒使用者避障车出现故障;若无异常情况,使用者通过控制面板或家属通过远程控制单元输入预设信息,并开启信息传输模块,主控中心模块每隔周期T3查询是否接收到紧急信息。若收到紧急信息则启动紧急模式;否则进行如下步骤:
其中,周期T3的取值范围为1秒到60分钟;预设信息包括但不限于常用路线、途径地、出门时间和返回时间,由远程控制单元或控制面板的语音输入或键盘输入;
步骤二:导航模块接收预设信息,基于预存地图规划路线,通过信息传输模块将规划路线和预设信息上传至远程控制单元,并通过远程控制单元告知家属使用者出行信息;
步骤三:车辆行驶模块依据步骤二输出的规划路线驱动子模块工作,驱动避障车前行,与此同时,GPS单元、信息传输模块、路况识别模块及主控中心模块工作;
步骤四:GPS单元实时定位,信息传输模块将实时采集的定位信息传至远程控制单元;
步骤五:路况识别模块通过视频拍摄子模块采集路况信息并由信息处理子模块处理,得出路况信息传输至主控中心模块;主控中心模块接收路况识别模块传来的图像信息,进行压缩、减帧并存储入图像存储单元,同时根据路况信息进行对应操作;
其中,信息处理子模块的处理包括但不限于拼接、去糊以及去噪;路况信息包括正常路况、低光强路况以及紧急路况,紧急路况包括但不限于路面坑洞、路面结冰、路面湿滑以及前方障碍;
根据路况信息进行对应操作,具体为:
五.A主控中心模块检测到正常路况,返回步骤四;
五.B主控中心模块检测到低光强路况,向照明子模块下达补光指令开启灯光,返回步骤四;
五.C主控中心模块检测到紧急路况,传输避障指令给车辆行驶模块规避障碍,同时将此紧急路况信息传至紧急模块,跳至步骤六;
步骤六:紧急模块中紧急保护单元向主控中心模块下达指令,使信息播报模块的警示灯闪烁,语音播报单元语音提醒使用者行驶方向以及速度改变,帮助使用者操控避障车,避开障碍后返回步骤四。
其中,使用者自定义路线模式如下:
步骤1:使用前避障车自检,若出现异常情况,则主控中心模块通过信息传输模块将避障车自检异常情况传至远程控制单元,并启动信息播报模块中的语音播报子模块提醒使用者避障车出现故障;若无异常情况,使用者通过控制面板输入预设信息,并开启信息传输模块,主控中心模块每隔周期T4查询是否接收到紧急信息,若收到紧急信息则启动紧急模式;否则进行如下步骤:
其中,周期T4的取值范围为1秒到60分钟;预设信息包括但不限于常用路线、途径地,由控制面板的语音输入或键盘输入;
步骤2:导航模块接收预设信息,基于预存地图规划路线,通过信息传输模块将规划路线和预设信息上传至远程控制单元,并通过远程控制单元告知家属使用者出行信息;
步骤3:车辆行驶模块依据步骤2输出的规划路线驱动子模块工作,驱动避障车前行,与此同时,GPS单元、信息传输模块、路况识别模块及主控中心模块工作;
步骤4:GPS单元实时定位,信息传输模块将实时采集的定位信息传至远程控制单元;
步骤5:路况识别模块通过视频拍摄子模块采集路况信息并由信息处理子模块处理,得出路况信息传输至主控中心模块;主控中心模块接收路况识别模块传来的图像信息,进行压缩、减帧并存储入图像存储单元,同时根据路况信息进行对应操作;
其中,信息处理子模块的处理包括但不限于拼接、去糊以及去噪;路况信息包括正常路况、低光强路况以及紧急路况,紧急路况包括但不限于路面坑洞、路面结冰、路面湿滑以及前方障碍;
根据路况信息进行对应操作,具体为:
5.A主控中心模块检测到正常路况,返回步骤4;
5.B主控中心模块检测到低光强路况,向照明子模块下达补光指令开启灯光,返回步骤4;
5.C主控中心模块检测到紧急路况,传输避障指令给车辆行驶模块规避障碍,同时将此紧急路况信息传至紧急模块,跳至步骤6;
步骤6:紧急模块中紧急保护单元向主控中心模块下达指令,使信息播报模块的警示灯闪烁,语音播报单元语音提醒使用者行驶方向以及速度的改变,帮助使用者操控避障车,避开障碍后返回步骤4。
紧急模式是指紧急模块中紧急处理单元判断使用者存在紧急情况的操作,具体包括如下两情况:
紧急A:使用者出现非正常情况,通过控制面板将非正常情况汇报给紧急模块,紧急保护单元通过主控中心模块下达指令将收到的图像信息和位置信息通过信息传输模块上传到远程控制单元并触发警告,同时启动信息播报模块工作;
其中,非正常情况包括但不限于摔倒、交通事故以及急性突发病症;
紧急B:导盲车电量不足或蓄电池模块故障:电源模块将此故障信息发送至紧急模块,紧急保护单元发送信息给电源模块激活备用电源,同时将电源故障信息发送给主控中心模块:主控中心模块通过导航模块规划返回路线,并控制车辆行驶模块驱动避障车行驶至预设目的地。
有益效果
本发明提出了一种具备远程信息传输的路况识别避障车,与市面上现有的导盲车及类似避障设备相比,具有如下有益效果:
1.本发明所述避障车工作模式能够完全模仿导盲犬的工作形式,与现有的推动式工作模式的避障车及类似产品相比,可依靠性更强;
2.发明所述避障车所具备的远程控制单元能够让家属实时获得使用者的所在位置,周围环境,同时也能在遇到紧急事故的第一时间得到消息,相较市面上现有的导盲车及避障设备,该模块的设计能让使用者真正达到独立行动的目的;
3.发明所述避障车所具备的路况识别系统能够清晰,全面的拍摄到使用者周围的环境,具有误判几率较低的优势,能够让使用者及时避开危险,同时该设计也能够配合信息传输模块实现图像信息远程传输,相较市面上现有的导盲车及避障设备能够为使用者提供更为精确的行走路线;
4.本发明结合市场需求,远程控制单元和信息传输模块的配合使用能够实现家属对使用者的实时监控,5G与4G信号在不同工作模式下的切换既能节约流量与电量又能保证不耽误信息内容的实时性;同时紧急模块对紧急情况的判断能够及时上传紧急信息,并且能在一定程度上帮助使用者寻求帮助,真正做到让使用者脱离对家属的依靠,应和市面上对避障车的要求。
附图说明
图1是本发明一种具备远程信息传输的路况识别避障车的组成及连接示意图;
图2是本发明一种具备远程信息传输的路况识别避障车的路况识别模块与主控中心模块的连接示意图;
图3是本发明一种具备远程信息传输的路况识别避障车中车辆行驶模块的组成与连接示意图;
图4是本发明一种具备远程信息传输的路况识别避障车的日常模式(包括预设目的地模式和使用者自定义路线模式)的流程图;
图5是本发明一种具备远程信息传输的路况识别避障车的紧急模式的流程图。
具体实施方式
下面结合具体实施例和附图,对本发明一种具备远程信息传输的路况识别避障车进行详细阐述。
实施例1
本实施例描述了应用本发明所述一种具备远程信息传输的路况识别避障车为具备自主行动能力的盲人群体提供导盲服务的避障车,并配合家属手机上的APP协同工作的具体实施。
如图1,为能够用于导盲的路况识别避障车的系统组成。从图中可以看出,该避障车包括主控中心模块、导航模块、路况识别模块、车辆行驶模块、信息播报模块、信息传输模块、电源模块、紧急模块、远程控制单元以及控制面板;
其中,远程控制单元为终端对应的APP。控制面板包括键盘输入单元、语音输入单元以及紧急按钮;电源模块包括蓄电池、太阳能充电单元、备用电源;主控中心模块与其他所有模块连接;导航模块包括地图存储单元、GPS单元;路况识别模块包括视频拍摄子模块、图像存储单元、信息处理子模块;车辆行驶模块包括驱动子模块、照明子模块、转向子模块以及制动子模块;信息播报模块包括蜂鸣器、警示灯以及语音播报单元;信息传输模块包括4G传输单元、5G传输单元以及无线信号收发子模块;紧急模块包括紧急保护单元以及紧急处理单元。
具体实施时,通过远程终端上的APP向避障车发送指令,确定目的地与规划的路线,使用者也可通过控制面板语音输入目的地,从而获得路线。远程终端上的APP具有人机交互友善的优点,家属可通过APP与避障车上无线信号收发装置实时获取使用者的位置信息与周边的环境图像信息,同时家属通过APP对避障车发出指令,为使用者规划路线与途径地。
路况识别模块包含视频拍摄子模块、图像存储单元以及信息处理子模块。车辆行驶模块包括驱动子模块,照明子模块,转型子模块,制动子模块。所述避障车中各模块与单元的连接关系如下:
电源模块与主控中心模块、导航模块、路况识别模块、车辆行驶模块、信息播报模块、信息传输模块、紧急模块、远程控制单元以及控制面板相连;主控中心模块与导航模块、路况识别模块、车辆行驶模块、信息播报模块、信息传输模块、电源模块、紧急模块、远程控制单元以及控制面板相连;路况识别模块中的视频拍摄子模块与图像存储单元相连,图像存储单元与信息处理子模块相连;信息处理子模块与主控中心模块相连;信息传输模块中,5G传输单元、4G传输单元和无线信号收发子模块相连;紧急模块中的紧急处理单元和紧急保护单元相连;信息播报单元中的蜂鸣器、警示灯以及语音播报单元分别独立与主控中心模块相连;导航模块中GPS单元和地图存储单元相连,车辆行驶模块中驱动子模块、照明子模块、转向子模块以及制动子模块分别独立与主控中心模块相连;控制面板中的紧急按钮分别与紧急模块以及主控中心模块相连;电源模块中太阳能充电单元和蓄电池相连。
图2是路况识别模块与主控中心模块的连接示意图。图2中,视频拍摄子模块中的n个广角摄像头采集的图像经信息处理子模块中的图像识别子模块、图像处理子模块以及图像上传子模块传输至主控中心模块处理后,再存储于图像存储单元中。具体实施时,还能根据路况状况、使用者以及家属设置,视频拍摄子模块中的n个广角摄像头采集的图像直接存储于图像存储单元中,或者经信息处理子模块中的图像识别子模块、图像处理子模块以及图像上传子模块存储于图像存储单元中。优选的,n=3。
其中,广角摄像头1…广角摄像头n分别对应发明内容中的视频拍摄子模块1…视频拍摄子模块n,n的数量大于等于3;
图3是本发明一种具备远程信息传输的路况识别避障车中车辆行驶模块的组成与连接示意图。从图中可以看出,车辆行驶模块包括处理器单元、驱动子模块、照明子模块、转向子模块以及制动子模块;处理器单元分别与驱动子模块、照明子模块、转向子模块以及制动子模块相连。
处理器单元具体实施时,处理器采用STM32单片机;驱动子模块具体实施时,包括L293D电机驱动单元和k个车轮;制动子模块包括刹车片1到刹车片m;且m小于等于k;优选的,k=4,m=2。
其中,车轮1…车轮n分别对应发明内容中的驱动子模块1…驱动子模块n;刹车片1…刹车片m分别对应发明内容中的制动子模块1…制动子模块m;车灯1…车灯p对应发明内容中的照明子模块1…照明子模块p。p的数量为大于等于4。
图4是避障车在自定义目的地模式和预设目的地模式时的工作流程图;
从图4可以看出,具体实施时,该避障车在使用前进行车辆自检,自检后,根据自检结果,若自检结果是故障,则主控中心模块通过信息传输模块将避障车自检异常情况传至远程控制单元,并启动信息播报模块中的语音播报子模块提醒使用者避障车出现故障;若无异常情况否则输入预设信息,并开启信息传输模块;其中,预设信息包括常用路线、途径地、出门时间和返回时间,由远程控制单元或控制面板的语音输入或键盘输入。同时主控中心模块每隔“周期T1”查询是否接收到紧急信息。若收到紧急信息则启动紧急模式;若未出现紧急信息方正常工作。“周期T1”在具体实施时,根据当前路况或使用者设定,其范围为1秒钟到10分钟。
当导航模块接收到预设信息后,其将基于预存地图规划路线,通过信息传输模块将规划路线和预设信息上传至远程控制单元。避障车的行进方式模仿导盲犬带动盲人前进的方式,能够最大化保留导盲犬的工作特征。同时GPS单元、路况识别模块及主控中心模块工作。车辆行驶模块依据规划的路线驱动子模块工作,驱动避障车前行。GPS单元实时定位,同时信息传输模块将以“周期T2”将定位信息传至远程控制单元;“周期T2”在具体实施时,根据当前路况或使用者设定,其范围为1秒钟到10分钟。
若主控中心模块检测到正常路况,则重复下述过程:
路况识别模块通过视频拍摄子模块采集路况信息并由信息处理子模块处理,得出路况信息传输至主控中心模块,主控中心模块将路况识别模块传来的图像信息进行压缩、减帧率存储入图像存储单元,当家属通过远程控制单元想要获得使用者周围的路况图像时,主控中心将会通过信息传输模块发送存储在图像存储单元的实时的图像信息至远程控制单元。在实施过程中,当远程控制单元未向主控中心模块索要图像信息时,信息传输模块将会使用4G传输单元进行传输工作。若主控中心接收到图像索要指令,且具备5G传输条件时,信息传输模块将优先使用5G传输单元进行信息传输,否则仍将使用4G传输单元进行传输。同时根据路况信息进行对应操作。使用者的家属希望能够最大限度的给予使用者行动的自由,远程控制单元和信息传输模块的配合使用能够实现家属对使用者的实时监控,而上述过程中使用的GPS信号和4G、5G传输单元恰好能够满足这一需求。而针对在偏远地区或5G信号未覆盖的弱信号地区,4G传输单元的存在也能够保证使用者基本的信息传输以及紧急情况的上传警示。该发明中,图像信息的识别仿造导盲犬对路面、红绿灯以及人流的判断,并且能够识别更为复杂的路况,进行准确判断和分析,比导盲犬对路况的识别更为广泛、准确。
当出现紧急路况时,避障车将根据紧急情况类型对应进行动作:
1.主控中心模块检测到低光强信息,向照明子模块下达补光指令开启灯光;
2.主控中心模块检测到紧急路况,将避障命令传输给车辆行驶模块规避碍,同时将此紧急路况信息传至紧急模块,紧急模块中紧急保护单元向主控中心模块下达指令,使信息播报模块的警示灯闪烁,语音播报单元语音提醒使用者行驶方向以及速度改变,帮助使用者操控避障车;
从图5可以看出,具体实施中紧急模式工作如下:紧急保护单元在接收到主控中心模块的紧急指令,以及在接收到使用者通过紧急按钮上报的紧急情况后快速分析出紧急情况种类。共有以下两种紧急情况:
紧急A:使用者出现非正常情况,通过控制面板将非正常情况汇报给紧急模块,紧急保护单元通过主控中心模块下达指令将收到的图像信息和位置信息通过信息传输模块上传到远程控制单元并触发警告,同时启动信息播报模块工作;
其中,非正常情况包括但不限于摔倒、交通事故以及急性突发病症;
紧急B:导盲车电量不足或蓄电池模块故障:电源模块将此故障信息发送至紧急模块,紧急保护单元发送信息给电源模块激活备用电源,同时将电源故障信息发送给主控中心模块:主控中心模块通过导航模块规划返回路线,并控制车辆行驶模块驱动避障车行驶至预设目的地。在紧急情况时,主控中心将会通过信息传输模块发送存储在图像存储单元的实时的图像信息并以周期T4持续更新远程控制单元端的图像信息。并且实时位置的更新频率也将以周期T4持续更新。若此时具备5G传输条件,则会优先使用5G信号传输,否则仍使用4G信号。
此处的T4范围应在200ms到1s之间;
紧急信息快速地,实时地上传至使用者家属能够增强对使用者的掌控,同时远程控制单元能够对导盲车下达指令,增强了人机交互的可靠性与便利性。5G与4G信号的选择既能保证信息的高速上传,同时也能适应各种环境的信息传输,保证了使用者在任何信号情况下都能准确,快速的传递自己的信息并与家属联系。
实施例2
本实施例描述了应用本发明所述一种具备远程信息传输的路况识别避障车为不具备自主行动能力的视力低下群体提供导盲服务的自动驾驶载人导盲车具体实施。
如图1,为一自动驾驶载人导盲车的系统组成。从图中可以看出,该避障车包括主控中心模块、导航模块、路况识别模块、车辆行驶模块、信息播报模块、信息传输模块、电源模块、紧急模块、远程控制单元以及控制面板;
其中,远程控制单元为终端对应的APP。控制面板包括键盘输入单元、语音输入单元以及紧急按钮;电源模块包括蓄电池、太阳能充电单元、备用电源;主控中心模块与其他所有模块连接;导航模块包括地图存储单元、GPS单元;路况识别模块包括视频拍摄子模块、图像存储单元、信息处理子模块;车辆行驶模块包括驱动子模块、照明子模块、转向子模块以及制动子模块;信息播报模块包括蜂鸣器、警示灯以及语音播报单元;信息传输模块包括4G传输单元、5G传输单元以及无线信号收发子模块;紧急模块包括紧急保护单元以及紧急处理单元。增加的精准定位避障子模块包括位置评估器单元,雷达单元,顶部激光雷达单元;
具体实施时,通过远程终端上的APP向避障车发送指令,确定目的地与规划的路线,使用者也可通过控制面板语音输入目的地,从而获得路线。远程终端上的APP具有人机交互友善的优点,家属可通过APP与避障车上无线信号收发装置实时获取使用者的位置信息与周边的环境图像信息,同时家属可以通过APP对避障车发出指令,为使用者规划路线与途径地。
路况识别模块包含视频拍摄子模块,图像存储单元,信息处理子模块,精准定位避障子模块。车辆行驶模块包括驱动子模块,照明子模块,转型子模块,制动子模块。如上所述避障车系统中中各模块与单元的连接关系如下:
电源模块为导盲车提供能量;主控中心模块分别与导航模块,路况识别模块,车辆行驶模块,信息播报模块,信息传输模块,紧急模块,远程控制单元,控制面板相连;
具体的,路况识别模块中,视频拍摄子模块与图像存储单元连接,图像存储单元、精准定位避障子模块与信息处理子模块;信息处理子模块与主控中心模块进行信息传输;信息处理子模块与主控中心模块进行信息传输;信息传输模块中,5G传输单元和4G传输单元与无线信号收发子模块相连;紧急模块中,紧急处理单元和紧急保护单元相连,同时控制面板上的紧急按钮与该模块相连;信息播报单元中蜂鸣器,警示灯,语音播报单元分别独立,接收信息播报模块从主控中心模块得到的指令并独立工作;导航模块中,GPS单元和地图存储单元相连,车辆行驶模块中驱动子模块,照明子模块,转向子模块,制动子模块分别独立,接受从主控中心模块得到的指令并独立工作;控制面板中,语音输入单元,键盘输入单元,紧急按钮相互独立,通过使用者的使用向主控中心模块发送指令;电源模块中太阳能充电单元和蓄电池相连。
图2是路况识别模块与主控中心模块的连接示意图。图2中,视频拍摄子模块中的n个广角摄像头采集的图像经信息处理子模块中的图像识别子模块、图像处理子模块以及图像上传子模块传输至主控中心模块处理后,再存储于图像存储单元中。具体实施时,还能根据路况状况、使用者以及家属设置,视频拍摄子模块中的n个广角摄像头采集的图像直接存储于图像存储单元中,或者经信息处理子模块中的图像识别子模块、图像处理子模块以及图像上传子模块存储于图像存储单元中。优选的,n=3。
其中,广角摄像头1…广角摄像头n分别对应发明内容中的视频拍摄子模块1…视频拍摄子模块n,n的数量大于等于3;
图3是本发明一种具备远程信息传输的路况识别避障车中车辆行驶模块的组成与连接示意图。从图中可以看出,车辆行驶模块包括处理器单元、驱动子模块、照明子模块、转向子模块以及制动子模块;处理器单元分别与驱动子模块、照明子模块、转向子模块以及制动子模块相连。
处理器单元具体实施时,处理器采用STM32单片机;驱动子模块具体实施时,包括L293D电机驱动单元和k个车轮;制动子模块包括刹车片1到刹车片m;且m小于等于k;优选的,k=4,m=4。
其中,车轮1…车轮n分别对应发明内容中的驱动子模块1…驱动子模块n;刹车片1…刹车片m分别对应发明内容中的制动子模块1…制动子模块m;车灯1…车灯p对应发明内容中的照明子模块1…照明子模块p。
在具体实施时,新增的精准避障子模块详细设置如下:
位置评估器单元4个,记为位置评估器单元1到位置评估器单元4,分别位于避障车的四个车轮上,帮助GPS单元准确确定车辆位置;雷达单元8个,分别记为雷达单元1到雷达单元8,分别位于避障车前方3个,后方三个,两侧各1个,帮助判断障碍物的距离;激光雷达单元1个,位于车顶,该激光雷达单元旋转感应避障车周围100米距离内的障碍物区情况;
从图4可以看出,具体实施时,该避障车在使用前进行车辆自检,自检后,根据自检结果,若自检结果是故障,则主控中心模块通过信息传输模块将避障车自检异常情况传至远程控制单元,并启动信息播报模块中的语音播报子模块提醒使用者避障车出现故障;若无异常情况否则输入预设信息,并开启信息传输模块;其中,预设信息包括常用路线、途径地、出门时间和返回时间,由远程控制单元或控制面板的语音输入或键盘输入。同时主控中心模块每隔“周期T1”查询是否接收到紧急信息。若收到紧急信息则启动紧急模式;若未出现紧急信息方正常工作。“周期T1”在具体实施时,根据当前路况或使用者设定,其范围为1秒钟到10分钟。
当导航模块接收到预设信息后,其将基于预存地图规划路线,通过信息传输模块将规划路线和预设信息上传至远程控制单元。同时GPS单元、路况识别模块及主控中心模块工作。车辆行驶模块依据规划的路线驱动子模块工作,驱动避障车前行。GPS单元实时定位,同时信息传输模块将以“周期T2”将定位信息传至远程控制单元;“周期T2”在具体实施时,根据当前路况或使用者设定,其范围为1秒钟到10分钟。
若主控中心模块检测到正常路况,则重复下述过程:
路况识别模块通过视频拍摄子模块采集路况信息并由信息处理子模块处理,得出路况信息传输至主控中心模块,主控中心模块将路况识别模块传来的图像信息进行压缩、减帧率存储入图像存储单元,当家属通过远程控制单元想要获得使用者周围的路况图像时,主控中心将会通过信息传输模块发送存储在图像存储单元的实时的图像信息至远程控制单元。在实施过程中,当远程控制单元未向主控中心模块索要图像信息时,信息传输模块将会使用4G传输单元进行传输工作。若主控中心接收到图像索要指令,且具备5G传输条件时,信息传输模块将优先使用5G传输单元进行信息传输,否则仍将使用4G传输单元进行传输。同时根据路况信息进行对应操作。市面上需要一种能够帮助不具备独立行动能力的残障人士出行的避障车,远程控制单元和信息传输模块的配合使用能够实现家属对使用者的实时监控,而上述过程中使用的GPS信号和4G、5G传输单元恰好能够满足这一需求。而针对在偏远地区或5G信号未覆盖的弱信号地区,4G传输单元的存在也能够保证使用者基本的信息传输以及紧急情况的上传警示。在该实施例中所增加的定位避障子模块将提供更为精准的定位、避障服务。同时该子模块的使用也能够让避障车真正具备无人驾驶的功能,保证了使用者的独立出行能力。该发明中,图像信息的识别仿造导盲犬对路面、红绿灯以及人流的判断,并且能够识别更为复杂的路况,进行准确判断和分析,比导盲犬对路况的识别更为广泛、准确。
当出现紧急路况时,避障车将根据紧急情况类型对应进行动作:
1.主控中心模块检测到低光强信息,向照明子模块下达补光指令开启灯光;
2.主控中心模块检测到紧急路况,将避障命令传输给车辆行驶模块规避碍,同时将此紧急路况信息传至紧急模块,紧急模块中紧急保护单元向主控中心模块下达指令,使信息播报模块的警示灯闪烁,语音播报单元语音提醒使用者行驶方向以及速度改变,帮助使用者操控避障车;
图5是避障车紧急模式的流程图。从图5可以看出,具体实施时紧急模式工作如下:紧急保护单元在接收到主控中心模块的紧急指令,以及在接收到使用者通过紧急按钮上报的紧急情况后快速分析出紧急情况种类。共有以下两种紧急情况:
紧急A:使用者出现非正常情况,通过控制面板将非正常情况汇报给紧急模块,紧急保护单元通过主控中心模块下达指令将收到的图像信息和位置信息通过信息传输模块上传到远程控制单元并触发警告,同时启动信息播报模块工作;
其中,非正常情况包括但不限于摔倒、交通事故以及急性突发病症;
紧急B:导盲车电量不足或蓄电池模块故障:电源模块将此故障信息发送至紧急模块,紧急保护单元发送信息给电源模块激活备用电源,同时将电源故障信息发送给主控中心模块:主控中心模块通过导航模块规划返回路线,并控制车辆行驶模块驱动避障车行驶至预设目的地。行动过程中主控中心模块随时根据精准定位避障子模块来确定避障车周围的障碍物数量和距离。在紧急情况时,主控中心将会通过信息传输模块发送存储在图像存储单元的实时的图像信息并以周期T5持续更新远程控制单元端的图像信息。并且实时位置的更新频率也将以周期T5持续更新。若此时具备5G传输条件,则会优先使用5G信号传输,否则仍使用4G信号。
此处的T5范围应在200ms到1s之间;
紧急信息实时地上传至使用者家属能够增强对使用者的掌控,增强了人机交互的可靠性。避障车所具备的精准定位避障子模块能够极大地增强使用者的出行可能性,同时精准定位避障子模块与其他模块的协同作用也能提供更可靠的自动驾驶功能。远程控制单元对避障车的干涉能够加强家属对使用者的操控,能够让家属与使用者间建立更好的联络通道。5G与4G信号的选择既能保证信息的高速上传,同时也能适应各种环境的信息传输,还可以节省流量。
实施例3
本实施例描述了在主控中心模块检测到使用者摔倒或出现交通事故后避障车的具体动作:
使用者通过控制面板上的紧急按钮将紧急情况汇报给紧急模块,紧急保护单元通过主控中心模块下达指令,下述模块根据指令作出相应动作:
1)信息播报模块控制语音播报单元的警示灯闪烁,蜂鸣器鸣响,播报求助信息向周围进行求助:
2)信息传输模块将收到的位置信息以的频率上传到远程控制单元并触发警示;
3)信息传输模块协同主控中心模块将存储在存储单元的图像信息传至远程控制单元;
4)车辆行驶模块驱动子模块停止工作,制动子模块启动以减速直至停止。
实施例4
本实施例描述了主控中心模块检测到避障车电量不足后避障车的操作。
当避障车在行驶过程中检测到电源模块电量不足或出现故障时,紧急保护单元通过主控中心模块下达指令,即主控中心模块将电量不足播报指令给信息播报模块中的语音播报单元,向使用者播报电量不足信息并告知使用者准备返回,与此同时,主控中心模块驱动避障车作出如下操作:
1)导航模块中GPS单元确定实时位置,按地图存储单元的预存地图和家庭地址规划返回路线;
2)信息传输模块将1)中导航模块规划的返回路线和GPS单元确定的实时位置上传至远程控制单元并触发警示;
3)避障车在返回途中信息传输模块上传实时位置和经过主控中心处理过后的图像信息至远程控制单元。
以上所述为本发明的较佳实施例而已,本发明不应该局限于该实施例和附图所公开的内容。凡是不脱离本发明所公开的精神下完成的等效或修改,都落入本发明保护的范围。
- 一种具备远程信息传输及定位功能的路况识别避障车
- 一种能够自动避障的电缆路径识别车