汽车AVM标定数据获取方法、装置、设备及存储介质
文献发布时间:2023-06-19 09:57:26
技术领域
本发明涉及汽车技术领域,尤其涉及一种汽车AVM标定数据获取方法、装置、设备及存储介质。
背景技术
随着汽车保有量的逐渐提升,国产消费及体验升级,泊车和行车安全问题越来越受到用户关注。但现有汽车通过车内后视镜和左右外后视镜进行泊车和行车过程中存在很多盲区,经常导致事故发生。360°全景环视系统实现360°无死角,使泊车和行车过程更加安全。360°全景环视系统主要由前、左、右、后摄像头以及360环视控制器这5个零件组成。前摄像头安装在前格栅区域,左、右摄像头分别安装在左、右后视镜上,后摄像头安装在后蒙皮或者尾门拉手上。全景系统采用鱼眼摄像头采集到的图像经过算法进行图像合成和图像修正,通过鸟瞰图可以真实实现。
360°全景影像系统作为一种新型智能化泊车辅助系统,已经越来越多地应用于当前车厂新推出的车型中,但在车厂组装过程中,由于生产工艺存在偏差,每个车辆的摄像头都存在不同的安装误差,因此,在生产过程中需要对每一个车辆都要进行自动标定矫正,以便系统能够减少制造工艺等因素对图像显示及拼接效果造成的影响,并且把标定数据固化的每一台车的相匹配的360°全景影像系统的控制器中,切唯一。但如果控制器损坏,更换控制器后,需要重新标定,而标定需要特定的标定场地,不利于4S店售后服务。
上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
发明内容
本发明的主要目的在于提供了一种汽车AVM标定数据获取方法、装置、设备及存储介质,旨在解决现有技术更换AVM模块时,需要特定的标定场地进行重新标定的技术问题。
为实现上述目的,本发明提供了一种汽车AVM标定数据获取方法,所述方法包括以下步骤:
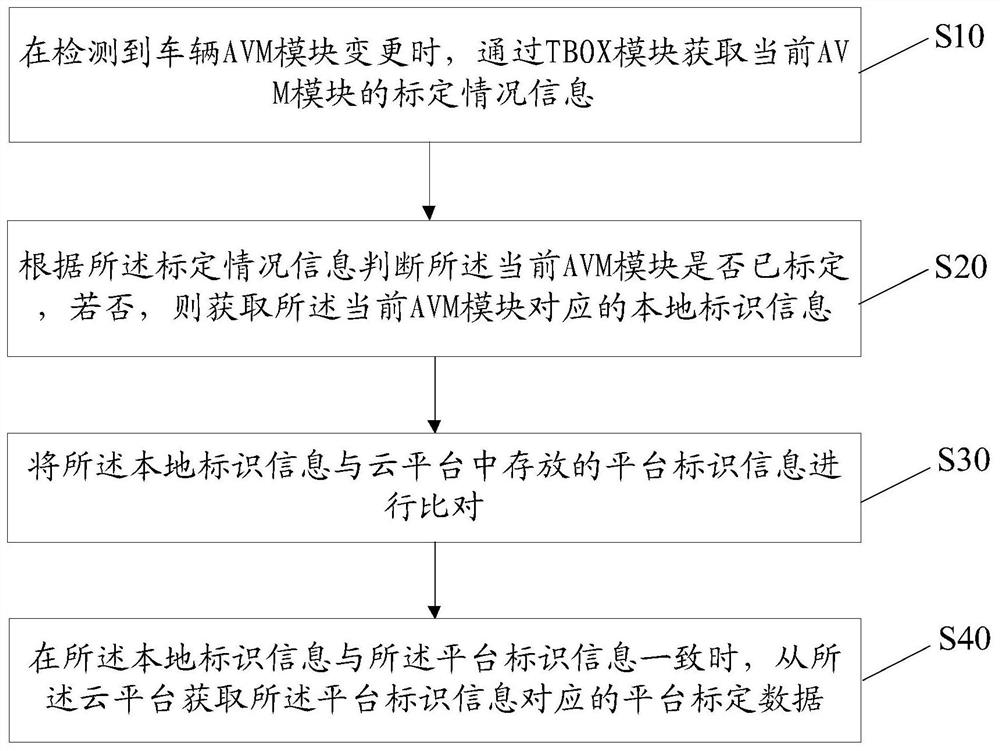
在检测到车辆AVM模块变更时,通过TBOX模块获取当前AVM模块的标定情况信息;
根据所述标定情况信息判断所述当前AVM模块是否已标定,若否,则获取所述当前AVM模块对应的本地标识信息;
将所述本地标识信息与云平台中存放的平台标识信息进行比对;
在所述本地标识信息与所述平台标识信息一致时,从所述云平台获取所述平台标识信息对应的平台标定数据。
优选地,所述在检测到车辆AVM模块变更时,通过TBOX模块获取当前AVM模块的标定情况信息的步骤之前,还包括:
通过AVM模块标定系统对车辆AVM模块进行标定,获得标定数据;
获取所述车辆的车辆识别号和AVM结构号;
将所述标定数据作为所述车辆的平台标定数据,将所述车辆的车辆识别号和AVM结构号作为平台标识信息,并将所述平台标定数据和所述平台标识信息上传至云平台。
优选地,所述根据所述标定情况信息判断所述当前AVM模块是否已标定,若否,则获取所述当前AVM模块对应的本地标识信息的步骤,包括:
根据所述标定情况信息判断所述当前AVM模块是否已标定;
在所述当前AVM模块未标定时,获取所述当前AVM模块的AVM结构号和所述车辆的车辆识别号;
将所述当前AVM模块的AVM结构号和所述车辆的车辆识别号作为所述当前AVM模块对应的本地标识信息。
优选地,所述在检测到车辆AVM模块变更时,通过TBOX模块获取当前AVM模块的标定情况信息的步骤,包括:
在检测到车辆AVM模块变更时,通过TBOX模块获取当前AVM模块的标定标志位信息,将所述标定标志位信息作为所述标定情况信息;
根据所述标定标志位信息判断所述当前AVM模块是否已标定。
优选地,所述通过AVM模块标定系统对车辆AVM模块进行标定,获得标定数据的步骤,包括:
通过AVM模块标定系统对所述AVM模块进行标定;
获取AVM模块的标定标志位信息;
根据所述标定标志位信息判断所述AVM模块是否已标定成功;
在所述AVM模块标定未成功时,返回通过AVM模块标定系统对车辆AVM模块进行标定的步骤。
优选地,所述根据所述标定标志位信息判断所述AVM模块是否已标定成功的步骤之后,还包括:
在所述AVM模块标定成功时,获取标定数据;
将所述标定数据传输至所述TBOX模块,并根据预设协议校验所述标定数据是否完成传输;
在所述标定数据完成传输时,通过所述TBOX模块将所述标定数据上传至所述云平台。
优选地,所述在所述本地标识信息与所述平台标识信息一致时,从所述云平台获取所述平台标识信息对应的平台标定数据的步骤之后,还包括:
将所述平台标定数据存储至所述当前AVM模块中,作为所述当前AVM模块的本地标定数据;
获取所述车辆的摄像头拍摄的车辆周边影像;
根据所述平台标定数据对所述车辆周边影像进行图像处理,获得车周全景图。
此外,为实现上述目的,本发明还提供一种汽车AVM标定数据获取装置,所述装置包括检测模块、判断模块、比对模块和获取模块;
检测模块,用于在检测到车辆AVM模块变更时,通过TBOX模块获取当前AVM模块的标定情况信息;
判断模块,用于根据所述标定情况信息判断所述当前AVM模块是否已标定,若否,则获取所述当前AVM模块对应的本地标识信息;
比对模块,用于将所述本地标识信息与云平台中存放的平台标识信息进行比对;
获取模块,用于在所述本地标识信息与所述平台标识信息一致时,从所述云平台获取所述平台标识信息对应的平台标定数据。
此外,为实现上述目的,本发明还提出一种汽车AVM标定数据获取设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的汽车AVM标定数据获取程序,所述汽车AVM标定数据获取程序配置为实现如上文所述的汽车AVM标定数据获取方法的步骤。
此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有汽车AVM标定数据获取程序,所述汽车AVM标定数据获取程序被处理器执行时实现如上文所述的汽车AVM标定数据获取方法的步骤。
本发明在检测到车辆AVM模块变更时,通过TBOX模块获取当前AVM模块的标定情况信息;根据标定情况信息判断当前AVM模块是否已标定,若否,则获取当前AVM模块对应的本地标识信息;将所述本地标识信息与云平台中存放的平台标识信息进行比对比,在本地标识信息与平台标识信息一致时,从云平台获取平台标识信息对应的平台标定数据。由于本发明是从云平台获取标定数据,相对于现有的需要在特定的标定场地进行标定才能获取标定数据的方式,本发明上述方式能够更加便捷、快速的获得AVM标定数据。
附图说明
图1是本发明实施例方案涉及的硬件运行环境的汽车AVM标定数据获取设备的结构示意图;
图2为本发明汽车AVM标定数据获取方法第一实施例的流程示意图;
图3为本发明汽车AVM标定数据获取方法第二实施例的流程示意图;
图4为本发明汽车AVM标定数据获取装置第一实施例的结构框图。
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
参照图1,图1为本发明实施例方案涉及的硬件运行环境的汽车AVM标定数据获取设备结构示意图。
如图1所示,该汽车AVM标定数据获取设备可以包括:处理器1001,例如中央处理器(Central Processing Unit,CPU),通信总线1002、用户接口1003,网络接口1004,存储器1005。其中,通信总线1002用于实现这些组件之间的连接通信。用户接口1003可以包括显示屏(Display)、输入单元比如键盘(Keyboard),可选用户接口1003还可以包括标准的有线接口、无线接口。网络接口1004可选的可以包括标准的有线接口、无线接口(如无线保真(WIreless-FIdelity,WI-FI)接口)。存储器1005可以是高速的随机存取存储器(RandomAccess Memory,RAM)存储器,也可以是稳定的非易失性存储器(Non-Volatile Memory,NVM),例如磁盘存储器。存储器1005可选的还可以是独立于前述处理器1001的存储装置。
本领域技术人员可以理解,图1中示出的结构并不构成对汽车AVM标定数据获取设备的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置。
如图1所示,作为一种存储介质的存储器1005中可以包括操作系统、数据存储模块、网络通信模块、用户接口模块以及汽车AVM标定数据获取程序。
在图1所示的汽车AVM标定数据获取设备中,网络接口1004主要用于与网络服务器进行数据通信;用户接口1003主要用于与用户进行数据交互;本发明汽车AVM标定数据获取设备中的处理器1001、存储器1005可以设置在汽车AVM标定数据获取设备中,所述汽车AVM标定数据获取设备通过处理器1001调用存储器1005中存储的汽车AVM标定数据获取程序,并执行本发明实施例提供的汽车AVM标定数据获取方法。
基于上述汽车AVM标定数据获取设备,本发明实施例提供了一种汽车AVM标定数据获取方法,参照图2,图2为本发明汽车AVM标定数据获取方法第一实施例的流程示意图。
本实施例中,所述汽车AVM标定数据获取方法包括以下步骤:
步骤S10:在检测到车辆AVM模块变更时,通过TBOX模块获取当前AVM模块的标定情况信息。
需要说明的是,本实施例的执行主体可以是一种具有网络通信以及程序运行的计算服务设备,例如车载TBOX、整车控制器和行车电脑等。以下以所述整车控制器为例,对本实施例及下述各实施例进行说明。
应理解的是,所述AVM是一个全景影像的系统。全称是Around View Monitor。通过多个超大广角鱼眼镜头拍摄图像,然后经过数据处理对拍摄图像进行畸变矫正以及拼接,形成周围影象。所述AVM模块可以是360°全景影像系统控制器,所述TBOX(Telematics BOX,远程信息处理器)是目前车辆实现远程数据业务的重要组成部分。通常情况下,在有业务数据需要处理时,TBOX处于工作状态,而在没有业务数据需要处理时,车载TBOX将会进入低功耗状态,以节约能量。当有新的业务数据需要处理时,服务器会远程唤醒车载TBOX,使其进入正常的工作状态并进行业务数据处理。所述标定情况信息可以是所述AVM模块的标定标志位信息。
在具体实施中,整车控制器在检测到车辆的360°全景影像系统控制器变更时,通过TBOX模块获取当前360°全景影像系统控制器的标定标志位信息。
步骤S20:根据所述标定情况信息判断所述当前AVM模块是否已标定,若否,则获取所述当前AVM模块对应的本地标识信息。
需要说明的是,所述当前AVM模块对应的本地标识信息可以是所述当前AVM模块的结构号和车辆识别号码,所述车辆识别号码(Vehicle Identification Number,或车架号码),简称VIN,是一组由十七个字母或数字组成,用于汽车上的一组独一无二的号码,可以识别汽车的生产商、引擎、底盘序号及其他性能等资料。在具体实施中,也可以通过其他方式进行车辆的识别,例如车牌号等,所述AVM模块的结构号可以是用来识别所述当前AVM模块的型号或参数信息等的标示。
应理解的是,所述判断所述当前AVM模块是否已标定可以是获取所述当前AVM模块的标定标志位信息,根据所述标定标志位信息判断所述当前AVM模块是否已标定。
在具体实施中,整车控制器获取所述当前AVM模块的标定标志位信息,根据所述标定标志位信息判断所述当前AVM模块是否已标定。若所述当前AVM模块没有标定,则获取所述当前AVM模块对应的AVM模块的结构号和车辆识别号码。
步骤S30:将所述本地标识信息与云平台中存放的平台标识信息进行比对。
需要说明的是,所述本地标识信息可以是所述当前AVM模块的结构号和车辆识别号码,所述平台标识信息可以是云平台中存储的AVM模块的结构号和车辆识别号码。
在具体实施中,整车控制器将所述当前AVM模块的结构号和车辆识别号码与所述云平台中存储的AVM模块的结构号和车辆识别号码进去对比。
步骤S40:在所述本地标识信息与所述平台标识信息一致时,从所述云平台获取所述平台标识信息对应的平台标定数据。
在具体实施中,整车控制器在所述本地标识信息与所述平台标识信息一致时,从所述云平台获取所述平台标识信息对应的平台标定数据。
进一步的,整车控制器将所述平台标识信息对应的平台标定数据存储至所述当前AVM模块中,作为所述当前AVM模块的本地标定数据,获取所述车辆的摄像头拍摄的车辆周边影像,并根据所述平台标定数据对所述车辆周边影像进行图像处理,获得车周全景图。
本实施例在检测到车辆AVM模块变更时,通过TBOX模块获取当前AVM模块的标定情况信息;根据标定情况信息判断当前AVM模块是否已标定,若否,则获取当前AVM模块对应的本地标识信息;将所述本地标识信息与云平台中存放的平台标识信息进行比对比,在本地标识信息与平台标识信息一致时,从云平台获取平台标识信息对应的平台标定数据。由于本实施例是从云平台获取标定数据,相对于现有的需要在特定的标定场地进行标定才能获取标定数据的方式,本实施例上述方式能够更加便捷、快速的获得AVM标定数据。
参考图3,图3为本发明汽车AVM标定数据获取方法第二实施例的流程示意图。
基于上述第一实施例,在本实施例中,所述步骤S10之前,还包括:
步骤S01:通过AVM模块标定系统对车辆AVM模块进行标定,获得标定数据。
需要说明的是,所述对车辆AVM模块进行标定可以是根据特定的标定场地进行标定,也可以是根据现有的标定方法进行标定,本实施例在此不加以限制。
在具体实施中,整车控制器根据现有的标定方法对所述车辆AVM模块进行标定,获得标定数据。
进一步的,整车控制器获取所述AVM模块上午标定标志位信息,根据所述标定标志位信息判断所述标定是否成功,在所述标定不成功时,返回所述整车控制器根据现有的标定方法对所述车辆AVM模块进行标定,获得标定数据的步骤。
步骤S02:获取所述车辆的车辆识别号和AVM结构号。
需要说明的是,所述车辆识别号码(Vehicle Identification Number,或车架号码),简称VIN,是一组由十七个字母或数字组成,用于汽车上的一组独一无二的号码,可以识别汽车的生产商、引擎、底盘序号及其他性能等资料。在具体实施中,也可以通过其他方式进行车辆的识别,例如车牌号等,所述AVM模块的结构号可以是用来识别所述当前AVM模块的型号或参数信息等的标示。
应理解的是,所述标定数据是与所述车辆及所述当前AVM模块一一对应的,存储的时候需要将三者作为整体存储,使用所述标定数据时,需先验证所述车辆的车辆识别号和AVM结构号是否与当前车辆的车辆识别号和AVM结构号一致。
在具体实施中,整车控制器获取所述车辆的车辆识别号和AVM结构号。
步骤S03:将所述标定数据作为所述车辆的平台标定数据,将所述车辆的车辆识别号和AVM结构号作为平台标识信息,并将所述平台标定数据和所述平台标识信息上传至云平台。
需要说明的是,所述云平台可以是专门用来存储所述平台标定数据和所述平台标识信息的服务器,用来存储本实施例中的所述平台标定数据和所述平台标识信息。在具体实现中,也可以是其他能起到相同或相似功能的其他存储或记录方法,本实施例在此不加以限制。
在具体实施中,整车控制器将所述标定数据作为所述车辆的平台标定数据,将所述车辆的车辆识别号和AVM结构号作为平台标识信息,并将所述平台标定数据和所述平台标识信息上传至云平台。
进一步的,在所述AVM模块标定成功时,获取标定数据,将所述标定数据传输至所述TBOX模块,并根据预设协议校验所述标定数据是否完成传输,在所述标定数据完成传输时,通过所述TBOX模块将所述标定数据上传至所述云平台。
其中,所述根据预设协议校验所述标定数据是否完成传输可以是根据事先预定的协议进行确认,也可以是检测到数据传输完成时,软件内部自动确认完成传输,本实施例在此不加以限制。
本实施例通过AVM模块标定系统对车辆AVM模块进行标定,获得标定数据;获取所述车辆的车辆识别号和AVM结构号;将所述标定数据作为所述车辆的平台标定数据,将所述车辆的车辆识别号和AVM结构号作为平台标识信息,并将所述平台标定数据和所述平台标识信息上传至云平台。本实施例通过事先获取所述标定数据并上传至云平台,使得更换AVM模块时不再需要通过特定的标定场地重新标定获取标定数据,本实施例上述方式能够获取并保存标定数据,使得更换AVM模块的时候可以更加便捷、快速的获得AVM标定数据。
参照图4,图4为本发明汽车AVM标定数据获取装置第一实施例的结构框图。
如图4所示,本发明实施例提出的汽车AVM标定数据获取装置包括检测模块、判断模块、比对模块和获取模块;
检测模块10,用于在检测到车辆AVM模块变更时,通过TBOX模块获取当前AVM模块的标定情况信息;
判断模块20,用于根据所述标定情况信息判断所述当前AVM模块是否已标定,若否,则获取所述当前AVM模块对应的本地标识信息;
比对模块30,用于将所述本地标识信息与云平台中存放的平台标识信息进行比对;
获取模块40,用于在所述本地标识信息与所述平台标识信息一致时,从所述云平台获取所述平台标识信息对应的平台标定数据。
在本实施例在检测到车辆AVM模块变更时,通过TBOX模块获取当前AVM模块的标定情况信息;根据标定情况信息判断当前AVM模块是否已标定,若否,则获取当前AVM模块对应的本地标识信息;将所述本地标识信息与云平台中存放的平台标识信息进行比对比,在本地标识信息与平台标识信息一致时,从云平台获取平台标识信息对应的平台标定数据。由于本发明是从云平台获取标定数据,相对于现有的需要在特定的标定场地进行标定才能获取标定数据的方式,本实施例上述方式能够更加便捷、快速的获得AVM标定数据。
本发明汽车AVM标定数据获取装置的其他实施例或具体实现方式可参照上述各方法实施例,此处不再赘述。
此外,本发明实施例还提出一种存储介质,所述存储介质上存储有汽车AVM标定数据获取程序,所述汽车AVM标定数据获取程序被处理器执行时实现如上文所述的汽车AVM标定数据获取方法的步骤。
此外,本发明实施例还提出一种汽车AVM标定数据获取设备,所述汽车AVM标定数据获取设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的汽车AVM标定数据获取程序,所述汽车AVM标定数据获取程序被所述处理器执行时实现上文所述的汽车AVM标定数据获取方法的步骤。
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质(如只读存储器/随机存取存储器、磁碟、光盘)中,包括若干指令用以使得一台终端设备(可以是手机,计算机,服务器,空调器,或者网络设备等)执行本发明各个实施例所述的方法。
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 汽车AVM标定数据获取方法、装置、设备及存储介质
- 远程汽车动力标定方法、装置、设备及存储介质