三电平整流器的延时补偿模型预测控制
文献发布时间:2023-06-19 10:48:02
技术领域
本发明专利涉及电力电子变流器控制领域,具体是电压环采用重复控制代替传统PI控制算法,同时针对三电平整流器模型预测控制方法在控制过程中存在大量计算,导致系统延时,严重阻碍系统应用。为克服上述难点,采用了改进的模型预测控制策略,即使用重复控制技术对预测电流指令值进行预测,提高预测精度,得到具有延时补偿的控制策略。
背景技术
控制策略是电力电子变换器的核心,很多学者对其控制策略进行了广泛研究。其中,模型预测控制作为近年来发展起来的新型计算机控制算法,对比传统PI算法响应速度慢、电流跟踪不精确等问题,这种控制策略不需要脉宽调制部分、结构简单、控制灵活且动态性能良好。模型预测控制以电力电子系统离散数学模型为预测模型,根据过去输出的数据和未来输入的信息预测系统未来的输出,使用滚动优化和反馈校正的策略,当目标函数的误差最小时确定最优的开关状态。因这种控制策略不需要脉宽调制部分,控制灵活且动态性能良好,促进了这种控制策略的实际应用。所以有的学者将电压定向控制与模型预测控制相结合,获得了非常好的效果,降低了网侧谐波含量、提升了系统动态影响。或者将模型预测电流控制与电压定向控制进行了理论分析和实验比较,详细地阐述了两种控制的优缺点。根据三电平整流器的27种参考矢量的空间位置,让远离参考矢量的电压矢量不参与预测模型在线计算和目标函数在线评估,大大提高计算效率。还有的学者将对给定电流进行“两步预测”的基础上提出一种电流校正算法,该算法可解决延时补偿问题,并降低由于采样引起的误差。这样模型预测控制器可以取代传统系统中PI模块和PWM模块控制时可以提供在多目标必须被满足的场合所需的工业灵活性、简化性和基于软件的优化方案。
本发明针对电压型三电平中性点钳位整流器(Three-level Neutral PointClamp Rectifier),设计了一种基于状态方程的模型预测电流控制(model predictivecurrent control,MPCC)策略,该算法以电压型整流器数学模型为基础,构建三电平中性点钳位整流器的预测模型。选择预测时域内整流器预测模型在αβ坐标下,对于每一个电压矢量,优化函数评价在下一个采样时刻中的参考电流与预测电流之间的误差,选择使电流误差最小的电压,同时产生相应的开关状态信号。同时,针对该算法在实际应用中容易产生计算时间延迟现象,为此,采用了改进的模型预测控制策略,即使用重复控制技术对预测电流指令值进行预测,得到具有延时补偿的控制策略。并根据状态方程离散化函数与优化函数构建系统预测控制结构框图,以此实现对整流器的模型预测控制。同时电压环亦采用重复控制,增强系统鲁棒性。
发明内容
本发明的目的是针对该算法在实际应用中容易产生计算时间延迟现象,为此,采用了改进的模型预测控制策略,即使用重复控制技术对预测电流指令值进行预测,得到具有延时补偿的控制策略。同时电压环亦采用重复控制,增强系统鲁棒性。
本发明实现发明目的采用如下技术方案:
本发明控制算法主要由3部分(步骤)组成:
1、根据控制变流器对象建立起其数学模型,如式(1)所示,并对建立起的数学模型进行离散化,假定系统采样周期T_s足够小,采用向前欧拉公式对电流进行离散,在一个采样周期中,微分项可以近似表示式(2):
其中e
2、FCS-MPC策略对可能的27组开关状态均进行预测,其计算量较大,考虑程序执行耗时对FCS-MPC控制效果的影响。对下一采样时刻参考预测电流值采用拉格朗日外推公式预测得到,建立起变换器的模型预测控制的评价函数,以控制系统电流为控制目标,定义目标函数如下:
其中i
3、根据针对该算法在实际应用中容易产生计算时间延迟现象使用重复控制技术对预测电流指令值进行预测,得到具有延时补偿的控制策略。同时电压环亦采用重复控制,增强系统鲁棒性。
有益效果:
本发明与现有技术相比,其有益效果体现在:三电平中性点钳位整流器模型预测控制方法在控制过程中存在大量计算,导致系统延时,严重阻碍系统应用。为克服上述难点,使用重复控制技术对给定电流指令值进行预测,提高预测精度,得到具有延时补偿的控制策略。同时使用一样参数整定电压环亦采用重复控制,增强系统鲁棒性。
附图说明
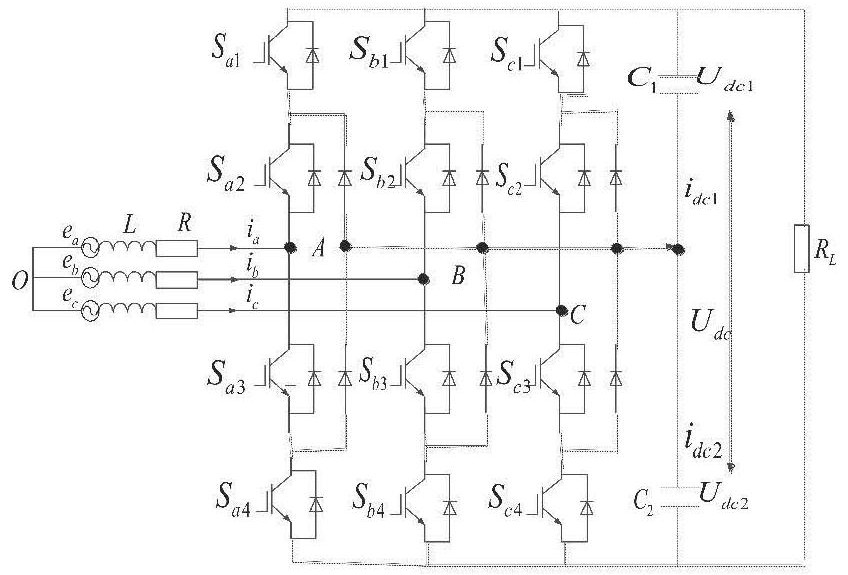
图1是NPC拓扑结构;
图2是三电平整流器空间电压矢量图;
图3是重复控制器控制框图;
图4是本发明提出的策略系统框图;
图5是传统FCS-MPC策略下的直流电压变化波形;
图6是电压环和预测电流使用重复控制的FCS-MPC策略下直流电压变化波形。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施实例1
根据图1的NPC拓扑结构,建立起其数学模型,如式(1)所示。
三电平中性点钳位整流器控制系统目标是电流跟踪给定参考电流、直流侧中性点平衡、单位功率整流,因三电平拓扑可提供27种有限个电压矢量,如图2所示,此时控制的关键在于上述电压矢量的最优选取方案。模型预测控制首先获得参考电流i
式中,n=0,1,……,26,ΔU
将重复控制器用于模型预测电流控制,就是将系统每个时刻的电流预测误差提前一拍加到下一周期的电流指令值上,对电流平推预测的延时进行补偿,使电流预测值接近实际值,提高系统有功电流的预测精度,消除控制延时对系统稳定性产生的影响。
使用重复控制器对电流指令值进行预测的控制框图如图3所示。重复控制器的核心为准积分器环节,其中N为一个基波周期的采样次数,系统采样频率为10kHz,电网频率为50Hz,则N为200。Q(z)为重复控制器的积分系数,为了保证系统稳定性,防止补偿量无限增加,Q(z)一般取0到1之间的常数,取Q(z)=0.95。k
当Q(z)取0.95时,由式(6)计算可得重复控制增益的取值范围为-0.05<k
具体控制系统框图如图4所示。
步骤1:对k时刻的网侧电压e
步骤2:考虑k时刻的开关状态S(k),对k+1时刻的网侧电流值进行预测,并考虑延迟补偿,对预测到的k+1时刻的电流经过重复控制得到补偿;
步骤3:电压环采用重复控制得到电流参考值用拉格朗日外推公式进行预测;
步骤4:选择使目标函数最小的候选子集中一个最优电压矢量对应的开关状态,并在下一时刻直接应用于整流器;
步骤6:返回步骤1。
图4和图5是给定直流侧电压在1s时从500变化到450的直流电压变化波形图,可以看出改进后的FCS-MPC策略下的直流电压的快速性及稳定性都比传统FCS-MPC策略好。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 三电平整流器的延时补偿模型预测控制
- 一种三相三电平八开关整流器的改进模型预测控制方法