一种机载SINS/BDS/GNSS/TAN组合导航半物理仿真系统
文献发布时间:2023-06-19 11:08:20
技术领域
本发明涉及机载组合导航半物理仿真领域,具体是一种机载SINS/BDS/GNSS/TAN组合导航半物理仿真系统。
背景技术
高精度长航时飞机对导航系统提出了很高的要求。凭借任何一种单独的导航手段来实现高精度导航,不仅成本高而且能够靠性差,因此必须将多种导航手段进行组合,实现优势互补。
捷联惯性导航系统(Strapdown Inertial Navigation System,SINS)不需要任何外来信息,也不向外辐射任何信息,仅依靠自身就能够在全天候条件下,在全球范围内和任何介质环境里进行连续的定位与导航,但是作为一种航迹推算导航方式,无法避免误差随时间积累的固有缺陷。
全球导航卫星系统(Global Navigation Satellite System,GNSS)为全球性的位置和时间测定系统,能够为地球表面、近地表面和地球外任意地点、任意多个用户提供全天候、实时、高精度的三维位置、速度、以及精密的时间信息,并且其误差不随时间积累。但实际情况下,GNSS量测信号极易受到周围环境、多路径效应等多种因素的影响。且缺乏自主权使GNSS的使用受到限制。
北斗卫星导航系统(BDS)是我国正在建设的全球卫星定位与通信系统。目前,北斗二代系统正在为中国及周边地区用户提供高精度、全天候的导航、定位和授时服务,毫无疑问,自行研制、自主控制的BDS是消除我国在该领域对别国依赖,摆脱卫星定位导航受制于人局面的最佳选择。
地形辅助导航(TAN)是一种利用地形高程特征来进行辅助定位的方法,它自主、隐蔽、连续、全天候,导航定位误差不随时间积累,且不存在卫星导航系统信号易受干扰等缺点,是理想的辅助导航定位手段。
对组合导航系统进行实际的跑车或飞行试验周期长,费用大,因此,采用半物理仿真的形式在试验室条件下对机载设备、组合导航系统定位精度进行测试十分必要。
发明内容
为了解决上述问题,本发明提出一种机载SINS/BDS/GNSS/TAN组合导航半物理仿真系统。
一种机载SINS/BDS/GNSS/TAN组合导航半物理仿真系统,包括:
飞行仿真计算机,模拟载机的飞行状态,并输出实时飞行参数数据,包括载机速度、位置、姿态数据;
惯性导航部件,接收飞行仿真计算机输出的HB6096格式的载机飞行参数,通过捷联解算输出速度、位置、姿态数据;
多体制卫星导航模拟器,接收飞行仿真计算机通过以太网实时传输的载机飞行参数,模拟产生BDS、GNSS卫星导航信号,并由惯性导航部件中的卫星导航接收机接收并解算;
组合导航计算机,内部存储预先完成地形高程数据库存储,并接收各导航数据,由导航解算完成组合导航运算。
所述的飞行仿真计算机包括负责运行飞行仿真系统的工控机一、通过以太网向多体制卫星导航模拟器发送载机的飞行速度、位置、姿态信息的通信模块、根据飞行控制律实现飞行仿真并生成相应轨迹的载机飞行仿真模块、将飞行仿真模块输出的载机飞行参数转换为HB6096格式输出给惯性导航部件的接口转换模块。
所述的惯性导航部件包括机箱组件、用于测量角速率和线加速度的惯性敏感组件及电子线路组件。
所述电子线路组件包括用于将加速度计输出的模拟量信号转换成数字信号的I/F转换电路板、为惯性导航部件内各组成部分提供符合要求的直流电源的二次电源板、I/O接口板、用于接收载机数据完成导航解算的导航计算机板、用于接收BDS、GPS、GLONASS卫星导航信号的卫星导航接收机板。
所述的多体制卫星导航模拟器包括负责运行多体制卫星导航模拟仿真软件的工控机二、信号生成模块负责模拟产生BDS、GNSS导航系统的卫星导航信号的信号生成设备、用于卫星导航信号的接收、发射、功率调节的转发器。
所述的信号生成设备包括信号生成模块、能够接收外部时钟参考输入且能够向外输出时钟参考信号时频模块、提供多个射频物理输入,对信号进行分路、滤波、放大、输出的信号调理模块、用于系统集成的专用机箱。
所述的组合导航计算机包括负责运行组合导航仿真软件的工控机三、通过以太网接收多体制卫星导航模拟器输出的导航信号的通信模块、完成捷联惯导系统与数据存储模块的数据格式转换的接口转换模块、用于事先存储地形高程数据的数据存储模块、用于各种导航信息的融合解算的导航解算模块。
本发明的有益效果是:通过修改飞行仿真计算机模拟参数,生成任意导航轨迹;采用半物理仿真的形式在试验室条件下对机载设备、组合导航系统定位精度进行测试,能够以克服实际跑车或飞行试验周期长、成本高的缺点。
附图说明
下面结合附图和实施例对本发明进一步说明。
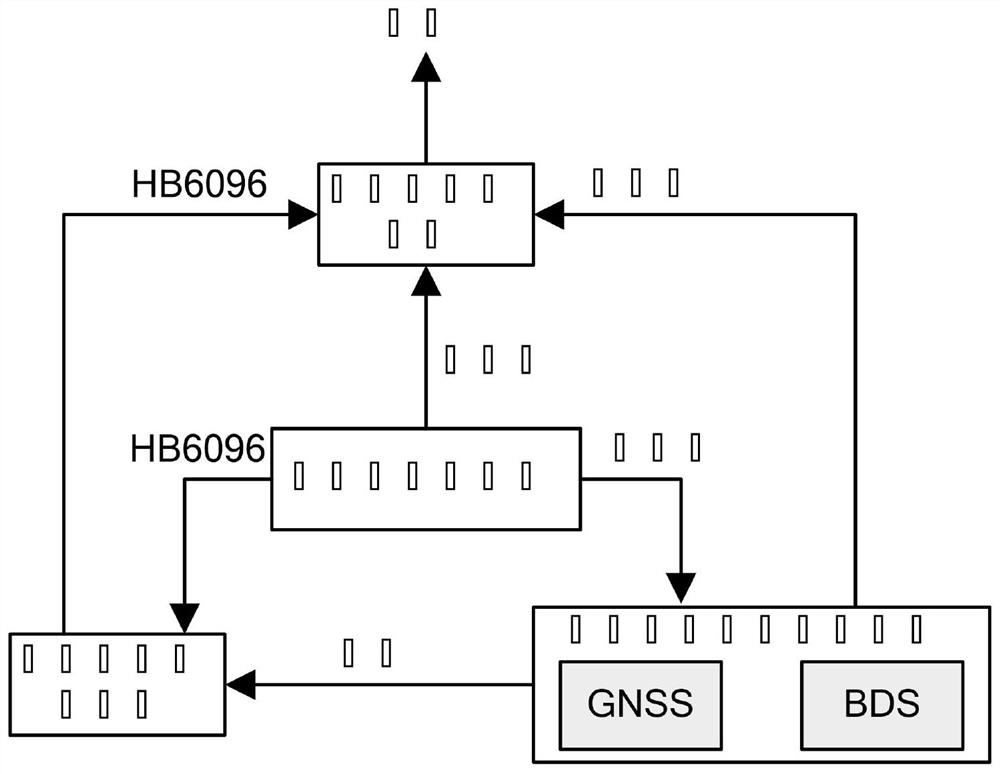
图1为本发明的机载SINS/BDS/GNSS/TAN组合导航半物理仿真系统框图;
图2为本发明的惯性导航部件原理框图;
图3为本发明的多体制卫星导航模拟器框图;
图4为本发明的飞行仿真计算机软件框图;
图5为本发明的组合导航计算机软件框图;
图6为本发明的流程框图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面对本发明进一步阐述。
如图1至图6所示,一种机载SINS/BDS/GNSS/TAN组合导航半物理仿真系统,包括:
飞行仿真计算机,模拟载机的飞行状态,并输出实时飞行参数数据,包括载机速度、位置、姿态数据;
惯性导航部件,接收飞行仿真计算机输出的HB6096格式的载机飞行参数,通过捷联解算输出速度、位置、姿态数据;
多体制卫星导航模拟器,接收飞行仿真计算机通过以太网实时传输的载机飞行参数,模拟产生BDS、GNSS卫星导航信号,并由惯性导航部件中的卫星导航接收机接收并解算;
组合导航计算机,内部存储预先完成地形高程数据库存储,并接收各导航数据,由导航解算完成组合导航运算。
通过修改飞行仿真计算机模拟参数,生成任意导航轨迹;采用半物理仿真的形式在试验室条件下对机载设备、组合导航系统定位精度进行测试,能够以克服实际跑车或飞行试验周期长、成本高的缺点。
首先通过飞行仿真计算机模拟载机飞行状态,实时输出载机飞行参数;然后,通过HB6096总线将载机实时飞行参数送至机载捷联惯性导航部件进行解算,输出纯惯性导航轨迹,同时,通过以太网将载机实时参数数据送至多体制卫星导航模拟器,驱动产生卫星导航信号供卫星导航接收机进行导航解算;最后,所有参数输出至预先保存有地形高程数据库的组合导航计算机,进行组合导航运算。
所述的飞行仿真计算机包括负责运行飞行仿真系统的工控机一、通过以太网向多体制卫星导航模拟器发送载机的飞行速度、位置、姿态信息的通信模块、根据飞行控制律实现飞行仿真并生成相应轨迹的载机飞行仿真模块、将飞行仿真模块输出的载机飞行参数转换为HB6096格式输出给惯性导航部件的接口转换模块。
所述的惯性导航部件包括机箱组件、用于测量角速率和线加速度的惯性敏感组件及电子线路组件。
所述电子线路组件包括用于将加速度计输出的模拟量信号转换成数字信号的I/F转换电路板、为惯性导航部件内各组成部分提供符合要求的直流电源的二次电源板、I/O接口板、用于接收载机数据完成导航解算的导航计算机板、用于接收BDS、GPS、GLONASS卫星导航信号的卫星导航接收机板。
所述的多体制卫星导航模拟器包括负责运行多体制卫星导航模拟仿真软件的工控机二、信号生成模块负责模拟产生BDS、GNSS导航系统的卫星导航信号的信号生成设备、用于卫星导航信号的接收、发射、功率调节的转发器。
所述的信号生成设备包括信号生成模块、能够接收外部时钟参考输入且能够向外输出时钟参考信号时频模块、提供多个射频物理输入,对信号进行分路、滤波、放大、输出的信号调理模块、用于系统集成的专用机箱。
所述的组合导航计算机包括负责运行组合导航仿真软件的工控机三、通过以太网接收多体制卫星导航模拟器输出的导航信号的通信模块、完成捷联惯导系统与数据存储模块的数据格式转换的接口转换模块、用于事先存储地形高程数据的数据存储模块、用于各种导航信息的融合解算的导航解算模块。
本发明的使用方法:
步骤S1:飞行仿真计算机模拟载机的飞行状态,并输出实时飞行数据,即载机速度、位置及姿态,至多体制卫星导航模拟器、捷联惯性导航部件及导航计算机;
步骤S2:多体制卫星导航模拟器接收飞行仿真计算机实时传输的载机飞行参数,模拟产生BDS、GNSS卫星信号,并由惯性导航部件中的卫星导航接收机接收并解算;捷联惯性导航部件自身根据飞行仿真计算机输出的实时飞行数据解算出纯惯性导航轨迹;
步骤S3:组合导航计算机接收各类导航数据,并判断:
A、若GNSS有效,则采用SINS/GNSS组合导航方法,若无效,则进一步判断BDS是否有效;
B、若BDS有效,则采用SINS/BDS组合导航方法,若无效,则进一步判断TAN是否有效;
C、若TAN有效,则采用SINS/TAN组合导航方法,若无效,则进一步判断SINS是否有效。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种机载SINS/BDS/GNSS/TAN组合导航半物理仿真系统
- 一种基于神经网络辅助的BDS/SINS组合导航方法和系统