被动关节装置、线缆引导件以及动力传递机构
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及连结医疗用机器人等的臂间的被动关节装置。
背景技术
腹腔镜手术通常由进行脏器的切开、切除以及缝合的医生(以下,称为“手术医生”)、保持内窥镜的医生(以下,称为“内窥镜操作人员”)以及为了展开手术医生的视野而进行脏器的牵引或切开时的张力保持等的医生(以下,称为“助手”)进行。在用于腹腔镜手术的手术支援装置(也被称为手术支援机器人等)中,有通过一个以上的机器人臂控制钳子或内窥镜、电手术刀等手术工具的姿势,由此减少手术所需的医生数量的装置。
用于以往的腹腔镜手术的手术支援装置能够大致分为进行手术医生、内窥镜操作人员以及助手的三个人的动作的装置和用一个臂保持内窥镜的装置。发挥手术医生、内窥镜操作人员以及助手的作用的装置是控制台型的手术支援机器人,已知有在患者的周边或患者上部配置多个机器人臂的装置。
作为机器人臂的机构,大致可以分为机械地决定腹壁上的旋转中心的机构,以及日本特开2018-175863号公报所公开那样的使机器人自身具有被动关节,以腹壁作为支点具有自由度地进行支承的机构这两类。
在具有被动关节的机构中,存在比该关节靠前端侧的自重施加在腹壁上的问题。虽然也有通过平衡配重补偿该施加在腹壁上的重量的方法,但为了变得紧凑,需要非常大的质量,从而并不现实。因此,如日本特开2011-115906号公报所公开的那样,也提出了通过弹簧进行自重补偿的机构,但在这样的机构中,关节部的大小成为问题。
另外,在具有被动关节的情况下,动力无法传递到比该关节靠前端侧的位置。因此,如日本特开2018-175863号公报所公开的那样,需要在比被动关节靠前端侧的位置安装致动器。
发明内容
本发明是鉴于上述课题而完成的,其目的在于,在用于医疗用的机器人等的被动关节中,能够在抑制关节的大型化的同时减轻因前端侧的重量而施加在臂上的向下方向的转动力。
附图说明
图1是示出本发明的一个实施方式的手术支援装置的结构的图。
图2是示出一个实施方式中的自重补偿机构的结构的图。
图3是从正面观察第二被动关节的图。
图4是示出在第二被动关节上安装了线缆引导部件的状态的图。
图5A-5D是示出线缆的处理方法的一例的图。
图6A、6B是示出线缆的引导部的变形例的图。
图7是示出将动力传递至比被动关节靠前的部分的机构的一例的图。
图8是示出引导旋转侧部件的移动的构造的图。
图9是示出使轴偏移的动力传递机构的图。
图10是示出手术工具的装卸机构的例子的图。
图11是示出悬垂物的配置的图。
具体实施方式
以下,参照附图对将本发明应用于医疗用的手术支援装置的一个实施方式进行详细地说明。
图1是示出本发明的一个实施方式的手术支援装置的结构的图。
本实施方式的手术支援装置10具有机器人臂12,该机器人臂12控制通过外套管13插入到患者的体腔11内的手术工具或末端执行器的姿势。手术支援装置10测量由手术医生插入到体腔11内而实际用于手术的手术工具14(以下,也称为手持医疗器具)的插入角度和插入深度。然后,构成为根据测量结果而控制用于控制手术工具14或末端执行器(以下,也统称为机器人医疗器具)的姿势的机器人臂12。
更具体而言,机器人臂12具有绕铅垂方向的旋转轴16转动的第一臂18、使第一臂18在水平面内沿箭头A方向主动转动的主动关节20、绕第一臂18的前端的铅垂方向的旋转轴22转动的第二臂24以及使第二臂24在水平面内沿箭头B方向主动转动的主动关节26。并且,机器人臂12具有绕第二臂24的前端的铅垂方向的旋转轴28转动的第三臂30和使第三臂30在水平面内沿箭头C方向主动转动的主动关节32。
在第三臂30的前端配置有使固定侧部件34绕铅垂方向的旋转轴36沿箭头D方向被动转动的第一被动关节37。另外,在固定部件34的下端配置有使旋转侧部件38绕作为水平方向的旋转轴的水平轴(转动轴)40沿箭头E方向(上下方向)被动转动(能够转动)的第二被动关节42。
也就是说,机器人臂30具备具有致动器的最少三轴的主动关节20、26、32以及最少两轴的第一和第二被动关节37、42,从而在比第二被动关节42靠前端侧的位置保持棒状的手术工具14。通常第一和第二被动关节37、42的轴垂直并相交于一点,但即使不垂直或不相交于一点,也能够实现本实施方式的机构。
另外,只要是能够唯一决定被动关节的位置和姿势的机构,则三轴的主动关节可以是任何机构,并不限于图1所示的结构。在各主动关节20、26、32以及第一和第二被动关节37、42上配置有测量关节角的编码器,从而能够通过反馈位置信息来唯一决定末端执行器的位置姿势。
这里,通常,在图1所示那样的结构中,在比第二被动关节42的水平轴40靠远位侧的位置具有手术工具14等的质量,由于该质量,对腹壁15施加了下方向的力。这会成为对患者的负担。为了防止这种情况,在本实施方式中,在第二被动关节42上设置有自重补偿机构100。
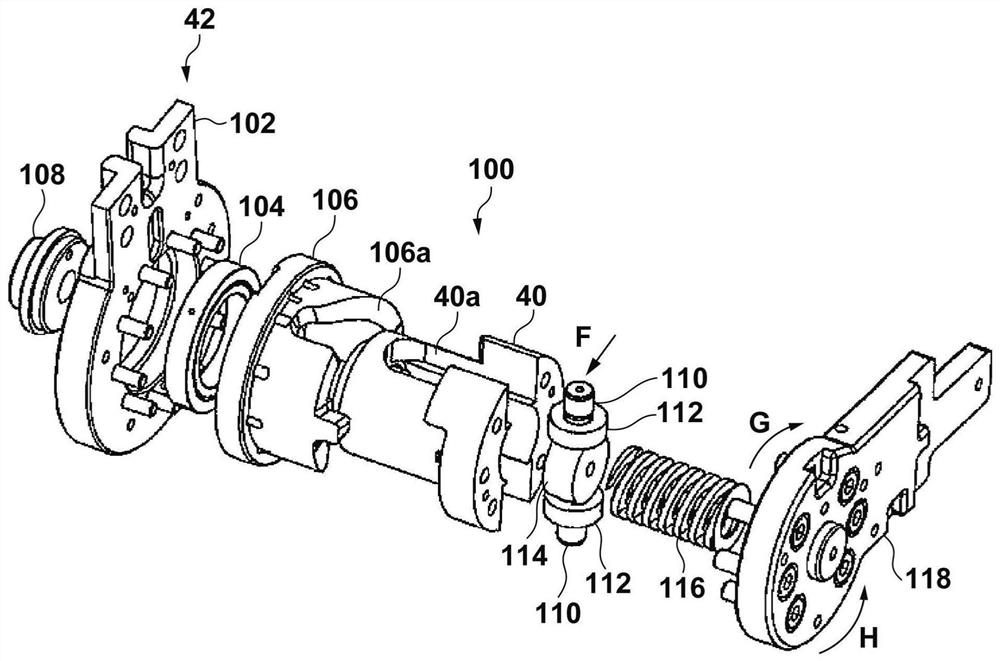
以下,对该自重补偿机构100进行说明。图2是示出本实施方式中的自重补偿机构100的结构的图。
如图2所示,配置于被动关节42的自重补偿机构100构成为主要具有固定侧部件102、水平轴轴承104、圆筒凸轮部件106、水平轴40、水平轴固定部件108、一对凸轮从动件110、一对滑动用轴承112、弹簧台座114、弹簧116以及旋转侧部件118。在圆筒状的圆筒凸轮部件106的圆筒面上形成有以水平轴40为中心对称的一对圆筒凸轮面106a。一对凸轮从动件所接触的圆筒凸轮面106a形成为沿水平轴40的方向倾斜。水平轴40相对于旋转侧部件118被固定,并被水平轴轴承104和水平轴固定部件108支承为能够相对于固定侧部件102相对旋转。另外,后面示出的线缆引导件并不包含在该图中。
如图2所示,一对凸轮从动件110、一对滑动用轴承112以水平轴40为中心而对称地安装,在两端安装有它们的弹簧台座114被朝向固定侧部件102施加了弹簧116的作用力。滑动用轴承112是能够独立于弹簧台座114和凸轮从动件110旋转的轴承,并在水平轴40的滑动面40a上滚动。即,凸轮从动件110、弹簧台座114以及滑动用轴承112追随水平轴40的旋转,受到来自圆筒凸轮面106a的克服弹簧116的作用力的约束力,从而沿水平轴40移动(能够滑动),并且旋转侧部件118受到以水平轴40为中心向上方向转动的力。换句话说,旋转侧部件118因其前端部的自重而受到箭头G方向的旋转力矩,但通过弹簧116的作用力,与圆筒凸轮面106a接触的凸轮从动件110从圆筒凸轮面106a受到箭头F方向的反作用力。因此,在旋转侧部件118产生箭头H方向的旋转力矩,从而基于旋转侧部件118的自重的旋转力矩被减轻或抵消。
这里,在本实施方式中,圆筒凸轮面106a以水平轴40为中心对称地配置,因此施加于凸轮从动件110的力也相对于轴对称,从而不需要用于使弹簧台座114精密滑动的直动引导件。
图3是从正面观察第二被动关节42的图。凸轮从动件110通过弹簧116的力而被按压于圆筒凸轮面106a。因此,通过圆筒凸轮面106a的倾斜,弹簧116的力被转换为向绕水平轴40的上方向旋转的力矩。由此,如已经说明的那样,能够减轻基于比水平轴40靠远位侧的重量的旋转侧部件118向下方向的转动力。因此,减轻了对手术中的患者的负担。
另外,弹簧116通常使用位移与载荷呈比例关系的特性的线形弹簧,但只要适当地设计凸轮面106a的凸轮曲线,则恒定载荷、非线形等特性的弹簧也能够得到相同的效果。
接下来,对本实施方式中的线缆的通过方法进行说明。
在机器人等驱动装置中,大多数情况下,线缆在其关节内通过,但在本实施方式中,在第二被动关节42内具有自重补偿机构100,因此水平轴40的内部被机构部件占据,从而线缆等无法通过。因此,以下对本实施方式的结构中的尽可能减小对线缆的负载的处理方法进行说明。
图4是示出本实施方式中的在第二被动关节42上安装了线缆引导部件202的状态的图。
线缆引导部件202是不受图2中的水平轴40、固定侧部件102以及旋转侧部件118中的任何部件的影响,而能够与水平轴40同轴地自由旋转的管状的部件。另外,如图4所示,在线缆引导部件202的外周面配置有具有圆弧状部分的引导部A204和引导部B206。线缆以在引导部A204、引导部B206的圆弧状的表面204a、206a上滑动的方式移动。这里,在图4中,引导部A204、引导部B206的形状不同,但只要是用于避开其他部件而下的工夫并引导线缆的面,则无论什么形式都能够实现相同的功能。
图5A~5D是示出线缆的处理方法的一例的图。另外,这里示出的方法不仅是电缆,只要是流体管或光纤等线缆状的部件则能够同样地进行处理。线缆A210、线缆B212在线缆引导部件202的周围一边三维屈曲一边进行配置,从而在与线缆引导部件202之间引起相对移动。
图5A、5B是示出水平轴40处于某个角度时的线缆A210、线缆B212以及线缆引导件202的状态的图。存在线缆A210和线缆B212这两种,但也可以是仅将一方作为在远位侧布线的线缆,将另一方作为机械线。
各线缆的一端和另一端通过线缆固定部件214而固定于固定侧部件102和旋转侧部件118,并以卷绕于轴的方式进入线缆引导部件202的区域。另外,在图示的关系上,关于线缆A210未描绘固定侧部件102的线缆固定部件214,但与线缆B212同样地固定于固定侧部件102。
这里,考虑了水平轴40的旋转角度从图5A、5B的状态变为图5C、5D的状态的情况。在固定侧部件102、旋转侧部件118双方的区域中,没有与线缆的相对滑动,仅是单纯的卷绕动作。另一方面,在线缆引导部件202的区域中,任意线缆都相对于线缆引导部件202相对滑动。如标记210a、210b的位置所示那样,线缆A210与线缆B212分别向相反方向移动。另外,此时,线缆引导部件202被线缆B212拉伸,因此绕水平轴40旋转,从而从固定侧部件102观察时的位置发生变化。
接下来,考虑了水平轴40的旋转角度从图5C、5D的状态变化为图5A、5B的状态的情况。此时,进行线缆A210拉伸线缆引导部件202的动作,因此线缆引导部件202向相反方向旋转,从而返回至图5A、5B的状态。这样,用于布线的线缆也用于驱动线缆引导部件202,由此能够自然地使线缆通过关节部,而无需在保持线缆的曲率半径的同时改变线缆长度。
在这里示出的例子中,通过使线缆A210和线缆B212对置地配置,使线缆引导部件202向相反方向驱动,但只要能带来相同的效果,则不限于该方法。例如,也考虑设置始终向线缆引导部件沿一定方向施加力矩的扭簧的方法、通过与水平轴的角度联动的齿轮等驱动线缆引导部件的方法等。只要采用这样的方法,则仅线缆A210或线缆B212中的任意一个的路径也能够实现同样的举动。
另外,在上述说明中,将引导部A204和引导部B206的引导面记为圆弧状,但本发明不限于圆弧状的形状。例如,虽说是圆弧状,但没必要是正圆,另外,也可以将引导部构成为如图6A所示那样接近圆弧状的形状的多边形状、如图6B所示那样将销或滚珠等排列为接近圆弧状的形状而得到的形状等包络线接近圆弧状的形状。
接下来,对将动力传递至比被动关节42靠前的部分的方法进行说明。在背景技术一栏中,记载了在具有被动关节的情况下,无法向比该关节靠前端侧的位置传递动力,因此需要在比被动关节靠前端侧的位置安装致动器。但是,如果是简单的动作,有时在比被动关节靠前的位置不设置致动器,从而机械地传递动力较为简便。在这里对该机构进行说明。
图7是示出向比被动关节靠前的部分传递动力的机构的一例的图。第一被动关节37和第二被动关节42是不具有致动器的被动的关节,因此固定侧部件34能够绕铅垂方向的旋转轴(垂直轴)36自由旋转,旋转侧部件38能够绕水平轴40自由旋转。通常,水平轴40与垂直轴36垂直并相交于一点,但也不一定需要如此。
在图7中,由马达等构成的旋转驱动源302的旋转力通过带轮304和带306而传递至蜗杆轴308。在这里,蜗杆轴308与水平轴40为同轴,并且各自的轴能够独立旋转。蜗杆轴308在被蜗杆轴承309支承并旋转时,将动力经由蜗杆310传递至蜗轮312。由此,作为被驱动体的旋转动作部件314绕与纸面垂直的旋转轴316旋转。在旋转动作部件314上搭载有手术工具14。
另外,在图7中,蜗轮312处于不是一周而是仅一部分有齿的状态。如果要使旋转驱动部件314旋转一周,则在整周设置蜗轮312,如果旋转角可以有限制,则可以如图7那样仅在一部分设置。
在这里,旋转动作部件314必须被约束为曲面状而移动。图8示出了能够实现该情况的构造的例子。
在图8中,轴承等滚动轴承324在形成于旋转侧部件38的槽322中移动,由此旋转动作部件314能够一边被约束为曲面状一边移动。但是,仅滚动轴承324无法承受所有的方向,因此,在旋转侧部件38的侧面326和R引导面(滑动面)328,将旋转动作部件314支承为能够通过滑动而移动。
返回到图7,由旋转驱动源302产生的动力经由带轮304、带306以及蜗杆310传递至蜗轮312,从而旋转动作部件314被旋转驱动。此时,在蜗轮312被锁定的状态,或负载非常大的状态下,使蜗杆轴308旋转的扭矩成为使水平轴40旋转的扭矩。但是,蜗杆的减速比通常非常大,因此即使产生使水平轴旋转的扭矩,其也是轻微的。
另外,通常,在旋转动作部件314上搭载有钳子或内窥镜这样的较长的轴形状的手术工具14,并被外套管13支承。因此,即使水平轴40产生了轻微的扭矩,旋转动作部件314也不会绕水平轴40旋转。也能够通过附加不影响水平轴40的被动旋转的程度的摩擦力产生机构(制动器或减震器)来解决。
另外,在图7所示的机构中,水平轴40与旋转动作部件314的旋转轴316不相交,但如图9所示,只要通过第二带332使轴偏移,也能够使垂直轴36、水平轴40以及旋转轴316相交于一点。
另外,在上述例子中,从旋转驱动源302通过带306传递动力的情况进行了说明,但也可以经由齿轮或类似的传递机构。
接下来,对相对于旋转动作部件314装卸手术工具14的机构进行说明。
通常,手术工具(手术器具)安装于比被动关节靠远位侧的位置,并且大多情况下,该器具为了更换而频繁地被拆卸。在这里,对相对于上述说明的旋转动作部件314能够进行手术工具14的装卸的机构进行说明。
图10是示出手术工具14的装卸机构的例子的图。如图9所示,在旋转动作部件314上设置有固定用突起342,并安装有固定用适配器344,以与该固定用突起342嵌合。使用固定螺钉345等进行安装,但固定方法并不限于此。
医疗器具适配器346以装卸自如的方式安装于固定用适配器344。医疗器具适配器346是用于将手术工具14安装于固定用适配器344的适配器,能够与想要安装的手术工具14的形状对应地具有若干种类。在固定用适配器344上配置有被未图示的弹簧施力的固定爪348,医疗器具适配器346与该固定爪348卡定,并安装于固定用适配器344。另外,通过按压解除杆350,能够从固定用适配器344拆卸医疗器具适配器346。
接下来,图11是示出悬垂物的配置的图。通常,机器人不能进行清洗或灭菌,因此盖上被称为悬垂物的袋状的覆盖物352来分离清洁部与非清洁部。在本实施方式中,如图11所示,在覆盖物352的一部分设置孔来使固定用突起342露出,从而安装固定用适配器344。
固定用突起342为非清洁部,因此必须尽可能地不露出。在本实施方式的构造中,即使不拆卸固定用适配器344也能够拆卸医疗器具适配器,因此能够不接触露出的非清洁部地进行设备的装卸。
如以上所说明的那样,根据上述实施方式,在被动关节设置利用弹簧的自重补偿机构,由此能够在抑制关节的大型化的同时减轻因前端侧的重量而施加于旋转侧部件的向下方向的转动力。
另外,通过在第二被动关节上配置绕水平轴旋转自如且具有圆弧状的线缆引导面的管状的线缆引导部件,从而即使在被动关节上设置自重补偿机构的情况下,也能够进行线缆的布设而不会对线缆造成负担。
并且,通过在被动关节上设置上述说明的动力传递机构,能够以简单的结构向比被动关节靠前的部分传递动力。
- 被动关节装置、线缆引导件以及动力传递机构
- 关节机器人的线缆引导装置