具有单独诊断的电驱动系统
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及用于控制电驱动系统的方法、计算机程序、计算机可读介质和控制器。另外,本发明涉及电驱动系统。
背景技术
电驱动器用来供应电马达,所述电马达是系统的组成部分,相对于预期安全等级,所述电驱动器对用户需要是安全的。电驱动器以及特别是其控制系统可提供功能安全特征,以帮助系统建立者实现这个预期安全等级。功能安全系统通常要求综合诊断,以确保所实现的措施基于系统的真实动作。用来实现诊断的一种方式是冗余度。所有关键测量和/或操作可利用两种不同的硬件解决方案来实现,并且可比较结果。还可存在用来限制常见故障原因的概率的两种不同测量技术。
例如,电驱动器提供不同类型的功能性安全功能,例如安全转矩关断(STO)、安全停止1(SS1)、安全紧急停止(SSE)、安全限制速度(SLS)、安全最大速度(SMS)和安全制动控制(SBC)。如同SS1、SLS和SMS的功能通常要求关于马达速度的反馈。
US 2015/084574 A1描述一种用于控制电马达的控制系统。该控制系统包括:第一估计器,其用于从马达M的所测量的相电压来估计马达的第一速度;以及第二估计器,其用于从马达的所测量的相电流来估计马达的第二速度。所测量的相电流进一步用来生成用于逆变器(该逆变器连接到马达)的开关信号。保险块将两个估计速度相互比较,并且可与它们之间的差异(divergence)相关地使马达停止。
US 2010/134064 A1描述一种用于估计电马达的速度的方法。速度估计布置从马达的所测量的电压和/或所测量的电流来计算马达的速度估计,并且将它发送给安全监督系统。连接到马达的逆变器的控制单元计算备选速度估计,并且也将它发送给安全监督系统,所述安全监督系统然后比较两个速度估计。如果两个速度估计彼此相差超过预确定阈值,则可激活马达的紧急制动。
US 2002/161492 A1描述一种用于使用经由通信链路所连接的两个单独处理器来监测电机的速度的方法。
发明内容
本发明的目的是要提供一种具有更安全的故障反应的电驱动系统。
这个目的通过独立权利要求的主题来实现。通过从属权利要求和以下描述,另外的示范实施例是显而易见的。
本发明的第一方面涉及一种用于控制电驱动系统的方法。电驱动系统可以是中压或低压系统,所述电驱动系统包括逆变器以及由逆变器所供应的电机。逆变器可包括两个或更多个半桥,和/或可把来自DC链路的DC电压转换为要供应给电机的AC电压。该方法可由驱动系统的控制器自动执行。
按照本发明的实施例,该方法包括:接收供应给电机的机器电流的机器电压信号和机器电流信号。供应给电机的AC电压的电流和电压可利用传感器来测量,并且可被转换为可由控制系统来处理的信号。必须注意,本文所述的信号还可以是数字化信号,即,随时间而改变的值。但是,信号也可以是模拟信号。而且,可接收DC链路电压信号,该DC链路电压信号可由逆变器所连接到的DC链路中的电压传感器来提供。
按照本发明的实施例,该方法进一步包括:基于机器电流信号和可选的DC链路电压信号来确定开关信号;并且利用开关信号来控制逆变器。例如,控制系统可从高级(superordinated)转换器来接收转矩参考或速度参考,并且可从其中确定电流参考。例如,利用脉宽调制,可生成用于逆变器的功率半导体开关的开关信号。开关信号可包括用于逆变器的多个功率半导体开关的开关时刻。
按照本发明的实施例,该方法进一步包括:从机器电流信号估计第一速度估计;从机器电压信号估计第二速度估计;以及将第一速度估计和第二速度估计相互比较,并且当第一速度估计和第二速度估计相互偏离超过阈值时,激活电驱动系统的故障反应,这将电驱动系统设置成预定义状态。
例如,第一速度估计可被确定为机器电流信号的基频。第二速度估计可被确定为机器电压信号的基频。当两种速度估计相互之间充分不同(这可通过将其差与阈值进行比较来检测)时,则可假定应用于电机的控制不是期望的那样,即,某个方面出错并且该值不是有效的。
在这种情况下,可激活电驱动系统的一个或多个故障反应。故障反应可以是程序或软件模块,该程序或软件模块执行将电驱动系统变换成所定义的状态的动作。例如,故障反应可执行安全功能,例如安全转矩关断(STO)、安全停止1(SS1)、安全紧急停止(SSE)、安全限制速度(SLS)、安全最大速度(SMS)和/或安全制动控制(SBC)。利用故障反应,电机的转矩和速度的至少一个可减少到例如非临界(uncritical)值。还可能的是,完全停止电机。
按照本发明的实施例,机器电流信号是多相信号,以及第一速度估计包括用于每相的分量,和/或机器电压信号是多相信号,并且第二速度估计包括用于每相的分量。如已经提到,驱动系统可以是多相系统,例如三相系统。在这种情况下,每个相电流和/或相电压可被测量并且转换为对应信号。
但是,可能的是,第一速度估计被确定为一个分量量(component quantity),和/或第二速度估计被确定为一个分量量。
按照本发明的实施例,逐个分量来比较第一多相速度估计和第二多相速度估计。在这种情况下,当分量的至少一个相互偏离超过阈值时,可激活故障反应。
按照本发明的实施例,开关信号由逆变器控制器(对该逆变器控制器供应机器电流信号)来确定。控制系统可包括若干组件,例如逆变器控制器和安全控制器。逆变器控制器可负责控制逆变器的半导体开关,而安全控制器可负责监测逆变器控制器的操作并且激活故障反应。
可能的是,机器电压信号只被供应给安全控制器,该安全控制器激活故障反应。由逆变器控制器所执行的对逆变器的控制可与机器电压信号无关地进行。这可增加安全控制器及其功能与逆变器控制器的独立性。
按照本发明的实施例,在电机的极(pole)处测量机器电压信号和/或机器电流信号。测量可在逆变器与电驱动器之间执行。由于机器电流信号用于控制逆变器并且机器电压信号可用于确定第二速度估计,所以机器电压测量可用于诊断机器电流测量。特别是,单独极电压测量可用于这个方面。这可消除对于增加附加测量硬件的需要,并且可降低系统成本。
按照本发明的实施例,故障反应包括:控制逆变器来降低电机的转矩和速度的至少一个。可能的是,故障信号从安全控制器发送给逆变器控制器,所述逆变器控制器开始按照安全模式来控制逆变器。在这种模式中,逆变器控制器可设法按照受控方式来停止电机。
按照本发明的实施例,故障反应包括:向电机的制动器发送制动信号。另一个选项在于,安全控制器生成用于电机的制动信号,所述电机则通过激活机械制动器来停止。
本发明的另外的方面涉及一种用于控制电驱动系统的计算机程序,该计算机程序在由至少一个处理器执行时适合于执行如上文和下文所述的方法。该方法可作为控制系统中的计算机程序来执行。控制系统可包括若干处理器,所述处理器可具有不同安全等级。例如,逆变器控制器可包括具有作为安全控制器的更低安全等级的处理器。
本发明的另外的方面涉及一种计算机可读介质,在所述计算机可读介质中存储这样的计算机程序。计算机可读介质可以是控制系统的存储器。通常,计算机可读介质可以是软盘、硬盘、USB(通用串行总线)存储装置、RAM(随机存取存储器)、ROM(只读存储器)、EPROM(电可擦可编程只读存储器)或FLASH存储器。计算机可读介质还可以是数据通信网络(例如因特网),该数据通信网络允许下载程序代码。通常,计算机可读介质可以是非暂时或暂时介质。
本发明的另外的方面涉及用于电驱动系统的控制系统,所述控制系统适合于执行如上文和下文所述的方法。
控制系统可包括逆变器控制器,其用于基于机器电流信号和可选的DC链路电压信号来确定开关信号,并且用于利用开关信号来控制逆变器。控制系统可包括安全控制器,其用于将第一速度估计和第二速度估计相互比较,并且用于可选地执行故障反应。
按照本发明的实施例,安全控制器和逆变器控制器在不同硬件组件中实现。两种控制器均可在不同硬件中实现,例如控制器的每个可通过专用处理器中运行的程序模块来提供。可能的是,控制系统包括多核处理器,并且两种控制器均在多核处理器的不同核心中运行。这些核心可具有不同安全等级。
存在关于通过控制系统的哪一个组件来确定第一速度估计的若干选项。
按照本发明的实施例,安全控制器估计第一速度估计和第二速度估计。两种速度估计均可由同一组件来确定,所述组件可具有比(as)用于确定开关信号的组件(即,逆变器控制器)要高的安全等级。
按照本发明的实施例,逆变器控制器估计第一速度估计,而安全控制器估计第二速度估计。由于逆变器控制器通常需要用于执行其控制功能的速度估计,所以这个速度估计可用作第一速度估计。此外,在这种情况下,速度估计由不同组件来提供,这可降低对误差的易感性。
本发明的另外的方面涉及一种电驱动系统,该电驱动系统包括:逆变器,其用于将DC链路电压转换为要供应给电机的输出电压;以及如上文和下文所述的控制器系统。另外,驱动系统可包括整流器和/或具有一个或多个电容器的DC链路。
必须理解,如上文和下文所述的方法的特征可以是如上文和下文所述的电驱动系统的特征,并且反之亦然。同样的情况适用于计算机程序、计算机可读介质和控制系统。
本发明的这些方面及其他方面根据在下文所述的实施例将是显然的,并且参照在下文所述实施例来说明。
附图说明
在下文中将参照附图中图示的示范实施例更详细地说明本发明的主题。
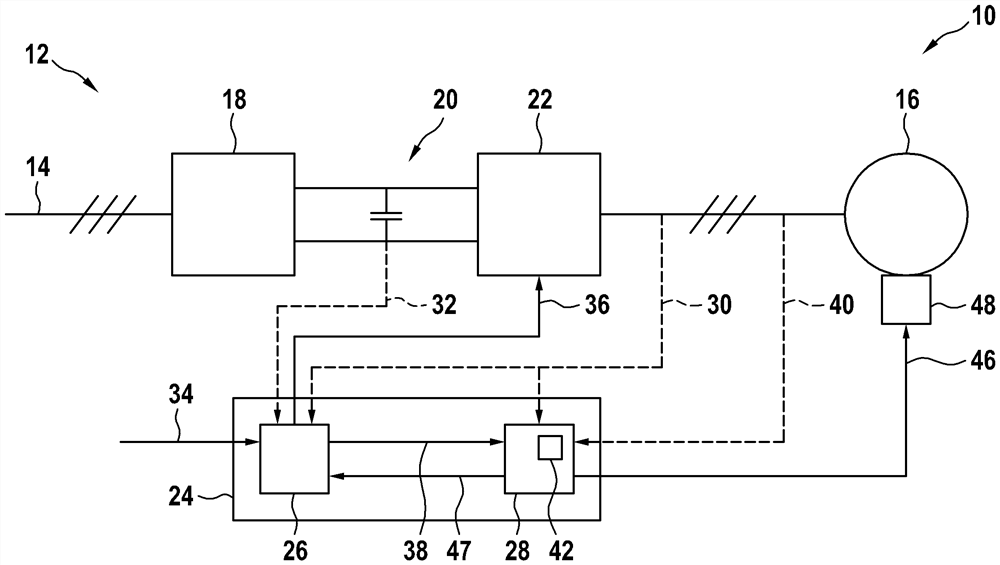
图1示意示出按照本发明的实施例的电驱动系统。
图2示出用于控制图1的电驱动系统的方法的流程图。
附图中使用的参考符号及其含意在参考符号的列表中以概括形式列出。大体上,在附图中,相同部件提供有相同参考符号。
具体实施方式
图1示出驱动系统10,该驱动系统10包括电转换器12,该电转换器12互连在电力网14与旋转电机16(例如电马达和/或发电机)之间。
转换器12包括整流器18,其用于对由电力网所提供的AC输入电压进行整流。输入电压可以是三相电压,和/或整流器18可以是无源三相整流器。经整流的输入电压然后被供应给DC链路20,该DC链路20包括一个或多个DC链路电容器。
逆变器22连接到DC链路20,并且将DC链路电压转换成AC输出电压,该AC输出电压被供应给电机16。输出电压可以是三相电压。逆变器22可包括一个或多个半桥,其具有可控半导体开关。
转换器12以及特别是逆变器22由控制系统24来控制,该控制系统24包括逆变器控制器26和安全控制器28。逆变器控制器26接收机器电流信号30并且可选地接收DC链路电压信号32。根据速度或转矩参考34(该参考34可由高级控制器来供应)和信号30、32,逆变器控制器26确定用于逆变器22的开关信号36。
逆变器控制器26还估计第一速度估计38,该第一速度估计38指示电机16的实际速度。在瞬态操作中,第一速度估计38可与速度参考34是不同的。速度估计38可从机器电流信号30来确定,例如通过确定机器电流信号30的基频来确定速度估计38。速度估计38然后被供应给安全控制器28。
还可能的是,由安全控制器28来确定第一速度估计38,所述安全控制器28还可接收机器电流信号30。
此外,安全控制器28接收机器电压信号40,并且从机器电压信号40来估计第二速度估计42。这再次可通过确定机器电压信号40的基频来进行。
如下面更详细所描述,安全控制器28适合于生成误差信号44,该误差信号44在驱动系统10的不安全状态被检测时被发送给逆变器控制器26。而且,在这种情况下,安全控制器可生成制动信号46,该制动信号46被发送给机械制动器48,以用于制动电机16。
机器电流信号30、DC链路电压信号32和机器电压信号40可通过传感器测量相应电流和/或电压来提供。特别是,可在电机16的极处测量机器电压信号40和/或机器电流信号3。必须注意,机器电流信号30和机器电压信号40可以是多相量,例如在三相系统的情况下的三相量。
图2示出用于控制电驱动系统10的方法的流程图,该方法可由如图1中所示的控制系统24来执行。
在步骤S10中,在用于供应电机16的供应线处测量机器电流信号30。而且,在DC链路20处测量DC链路电压信号32。在逆变器控制器26中接收机器电流信号30、DC链路信号32和参考34,并且逆变器控制器26基于这些量来确定开关信号36。开关信号36被发送给逆变器22,并且利用开关信号36来控制逆变器22以及特别是其半导体开关。
在步骤S12中,第一速度估计38从机器电流信号30来确定。这可由逆变器控制器26来进行,其中可在开关信号的确定期间已经计算第一速度估计38。还可能的是,安全控制器28估计第一速度估计38。在这种情况下,机器电流信号30也可被供应给安全控制器28。
在步骤S14中,在用于供应电机16的供应线处测量机器电压信号40。在安全控制器28中接收机器电压信号40,以及安全控制器28从机器电压信号40来估计第二速度估计42。可能的是,机器电压信号40只被供应给安全控制器28。
利用第二速度估计42,可从电动机相的极电压状态来计算单独电频率。两种速度估计38、42均可从单独测量来确定。此外,机器电压信号40的测量可与开关信号36的生成无关,即,逆变器控制器26可以不使用机器电压信号40作为用于控制的反馈。可以仅使用相电流信息,即,机器电流信号30。
还必须注意,可利用单个多通道AD转换器来实现电流测量和/或机器电流信号30的生成,这可能是常见故障原因。
如已经提到,机器电流信号30可以是三相信号,以及第一速度估计38可包括用于每相的分量。还可能的是,机器电压信号40是三相信号,并且第二速度估计42包括用于每相的分量。
在步骤S16中,安全控制器28将第一速度估计38和第二速度估计42相互比较。在多分量量的情况下,可逐个分量来比较第一速度估计38和第二速度估计42。
如果速度估计38、42基本上相同(至少在稳态操作期间),则电流测量通路中的问题可排除,和/或可假定系统10正确操作。
当第一速度估计38和第二速度估计42(或者其分量中的至少一个)相互偏离超过阈值,则安全控制器28可执行和/或可激活电驱动系统10的故障反应。
基于电流和电压的速度估计38、42可以只在特定操作点中提供准确结果。例如,两种值在某些条件(例如快速转矩和/或速度变化)的情况下均可能是不准确的。
在步骤S18中,执行一个或多个故障反应。这也可由安全控制器28来进行。一个或多个故障反应可以是也由安全控制器28和/或逆变器控制器26的处理器所执行的计算机程序和/或软件模块。
故障反应中的每个可预计用于将驱动系统10设置到预定义状态中。例如,电机16的转矩和速度中的至少一个可被降低,以安全地关闭驱动系统10和/或将驱动系统10引导到所定义状态中。
可能的是,激活故障反应,这控制逆变器22来降低电机16的转矩和速度中的至少一个。这种故障反应可由逆变器控制器26在它接收由安全控制器28所生成的误差信号44时执行。
还可能的是,激活故障反应,这生成制动信号46,该制动信号46被发送给电机16的制动器48。这种故障反应可由安全控制器28来执行。
虽然在附图和以上描述中详细图示和描述了本发明,但是这种图示和描述被认为是说明性或示范性而不是限制性的;本发明并不局限于所公开的实施例。根据研究附图、本公开和所附权利要求书,通过本领域熟练的并且实施要求保护的本发明的技术人员能够理解和实现对所公开的实施例的其他变更。在权利要求中,词语“包括”不排除其他元件或步骤,以及不定冠词“一”或“一个”不排除多个。单处理器或控制器或其他单元可实现权利要求中所记载的若干项的功能。在互不相同的从属权利要求中记载某些措施的纯粹事实并不指示这些措施的组合不能有利地使用。权利要求书中的任何参考符号不应当被理解为限制范围。
参考符号列表
10 驱动系统
12 电转换器
14 电力网
16 旋转电机
18 整流器
20 DC链路
22 逆变器
24 控制系统
26 逆变器控制器
28 安全控制器
30 机器电流信号
32 DC链路电压信号
34 速度和/或转矩参考
36 开关信号
38 第一速度估计
40 机器电压信号
42 第二速度估计
44 误差信号
46 制动信号
48 机械制动器。
- 具有单独诊断的电驱动系统
- 用于喷嘴单独地诊断燃料喷射机构的方法和具有燃料喷射机构的内燃机