一种翼盒及飞行器
文献发布时间:2023-06-19 11:27:38
技术领域
本申请涉及飞行器技术领域,尤其涉及一种翼盒及飞行器。
背景技术
飞行验证是在真实飞行条件下进行科学技术研究和产品测试实验的过程,在航空科技领中通常采用缩比模型对飞机进行飞行验证,缩比模拟飞行实验是按照动力学相似规律,利用飞行器缩尺模型(或验证机)在真实大气中进行模拟飞行,传统的“一对一”验证飞行器制作费时费力,在试飞过程中也很难完全反应飞机的飞行品质,而在飞行包线方面。传统的验证飞行在包线边缘会变得不稳定甚至失去控制,当出现失控状况无法通过盖面机翼参数使飞机达到一个更大的包线范围,无法确保稳定飞行。
发明内容
本申请提供了一种翼盒及飞行器,以解决缩比验证飞行器飞行在包线的边缘飞行不稳定以及自由翼飞行器参数种类较少的问题。
一种翼盒,包括:翼盒本体,第一定位板,第二定位板,机翼位移操纵机构,掠角操纵机构以及反角操纵机构;
所述第一定位板与所述第二定位板设置在所述翼盒本体内部,所述掠角操纵机构与所述反角操纵机构设置在所述机翼位移操纵机构上,所述机翼位移操纵机构设置在所述第一定位板与所述第二定位之间;
其中,所述机翼位移操纵机构包括:主梁,支撑板,滑动杆,舵机,齿盘,同步带,第一固定片以及第二固定片;
所述滑动杆两端固定连接所述第一固定片以及第二固定片,所述支撑板通过卡槽与所述主梁固定连接,所述同步带贯穿所述第一固定片以及所述第二固定片,所述齿盘(45)设置在所述第一固定片一端,且与所述同步带相连接,所述舵机连接所述齿盘;
所述主梁底边设置在所述同步带上,且所述滑动杆贯穿所述主梁。
优选的,所述掠角操纵机构包括:掠角伺服舵机,机翼安装底板,机翼安装顶板,从动齿轮,转轴,连接件,加强筋,掠角滑孔,机翼;
所述机翼安装顶板通过所述连接件连接所述机翼安装底板,所述掠角伺服舵机设置在所述机翼安装顶板上,且所述掠角伺服舵机设有连接部的一端贯穿所述机翼安装顶板;
所述转轴连接所述从动齿轮,所述转轴一端贯穿所述机翼安装顶板,另一端贯穿所述机翼安装底板,所述从动齿轮连接所述掠角伺服舵机的连接部;
所述机翼安装底板上设有所述掠角滑孔,所述加强筋设置在所述机翼安装底板两侧,所述机翼通过所述转轴以及所述从动齿轮连接所述掠角伺服舵机;
所述机翼安装底板与所述主梁端部铰连。
优选的,所述机翼包括:翼梁,分力片以及机翼本体;
所述翼梁设置在所述机翼本体内部,所述分力片贯穿所述翼梁,所述分力片远离贯穿孔的一端贯穿所述掠角滑孔,且与所述掠角滑孔内壁相接触。
优选的,所述反角操纵机构包括:反角伺服舵机,减速齿轮,曲轴,曲轴连接轴,曲轴联动片;
所述曲轴连接轴贯穿所述支撑板,以及所述减速齿轮,所述曲轴连接轴两端分别设置有所述曲轴,所述反角伺服舵机设置在所述曲轴连接轴下部,且与所述减速齿轮电动连接;
所述曲轴联动片上设有联动滑孔,所述曲轴联动片通过所述联动滑孔可滑动的连接所述曲轴,且所述曲轴联动片设置在所述掠角操纵机构上。
优选的,还包括:机翼数据采集器;
所述机翼数据采集器设置在所述同步带上。
一种飞行器,包括如上述所述的翼盒。
由以上技术方案可知,本申请提供一种翼盒及飞行器,包括:翼盒本体,第一定位板,第二定位板,机翼位移操纵机构,掠角操纵机构以及反角操纵机构,所述第一定位板与所述第二定位板设置在所述翼盒本体内部,所述掠角操纵机构与所述反角操纵机构设置在所述机翼位移操纵机构上,所述机翼位移操纵机构设置在所述第一定位板与所述第二定位板之间,一种飞行器,包括上述所述的翼盒,以解决缩比验证飞行器飞行在包线的边缘飞行不稳定以及自由翼飞行器参数种类较少的问题。
附图说明
为了更清楚地说明本申请的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
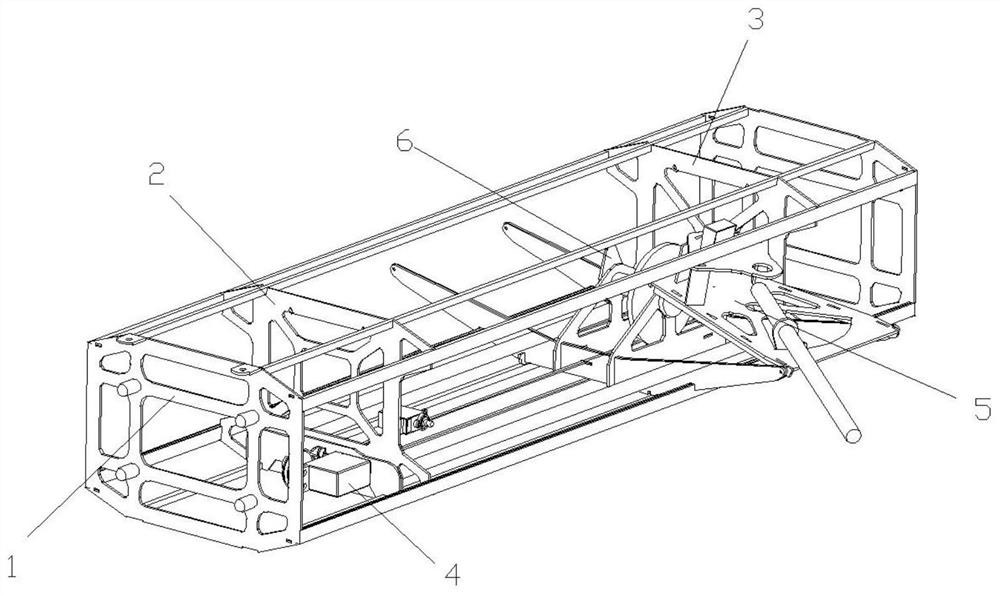
图1为翼盒结构示意图;
图2为机翼位移操纵机构结构示意图;
图3为掠角操纵机构结构示意图;
图4为反角操纵机构结构示意图;
图5为翼盒与机翼组装结构示意图;
图6为飞机机翼常态示意图;
图7为飞机机翼上反极限示意图;
图8为飞机机翼下反极限示意图;
图9为飞机机翼前掠极限示意图;
图10为飞机机翼后掠极限示意图。
具体实施方式
下面将详细地对实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下实施例中描述的实施方式并不代表与本申请相一致的所有实施方式。仅是与权利要求书中所详述的、本申请的一些方面相一致的系统和方法的示例。
缩比验证飞行器作为介于设计图纸与全尺寸飞机之间的重要因素,一直以来广泛受到航空领域设计人员的重视。然而传统的“一对一”验证飞行器不仅制作费时费力,在试飞过程中也很难完全反映飞机的飞行品质。因此,开发机翼参数可变,总体布局可调整的“自由翼类”飞行器,可以更方便而高效的进行缩比验证飞行.
目前,传统验证飞行在包线的边缘会变得极不稳定甚至失去控制,但是变掠翼飞机可以放心的挑战甚至尝试突破飞行包线。一旦出现失控现象,完全可以通过改变机翼参数,使飞机达到一个更大的包线范围之内,稳定飞行。
在本申请提供的技术方案中,请参见图1,提供一种翼盒及飞行器,包括:翼盒本体1,第一定位板2,第二定位板3,机翼位移操纵机构4,掠角操纵机构5以及反角操纵机构6,所述第一定位板2与所述第二定位板3设置在所述翼盒本体1内部,所述掠角操纵机构5与所述反角操纵机构6设置在所述机翼位移操纵机构4上,所述机翼位移操纵机构4设置在所述第一定位板2与所述第二定位板3之间,其中,所述机翼位移操纵机构4包括:主梁41,支撑板42,滑动杆43,舵机44,齿盘45,同步带46,第一固定片47以及第二固定片48,所述滑动杆43两端固定连接所述第一固定片47以及第二固定片48,所述支撑板42通过卡槽与所述主梁41固定连接,所述同步带46贯穿所述第一固定片47以及所述第二固定片48,所述齿盘45设置在所述第一固定片47一端,且与所述同步带46相连接,所述舵机44连接所述齿盘45,所述主梁41底边设置在所述同步带46上,且所述滑动杆43贯穿所述主梁41。
进一步地,在本申请提供的技术方案中,还包括:机翼数据采集器,所述机翼数据采集器设置在所述同步带46上。
在实际应用中,请参见图1和图2,机翼位移操纵机构4的实现由舵机44及齿盘45,主梁41和同步带46带动机翼位操纵机构4移动,以达到机翼整体前后移动的效果。通过对机翼位移操纵机构4的自锁性,可靠性以及重量的考虑,最终采用同步带46配合大尺寸同步带轮完成相关操纵。位移操纵同样需要位置采集机构。
在本申请提供的技术方案中,机翼数据采集器主要采集机翼位移以及角度变化数据,机翼数据采集器设计在变掠角,变反角以及同步带46处,通过减速齿轮将旋转位移输出给角度传感器,用以侦测当前位移闭环系统的设计使得机翼的姿态在极限位置之间的任何一个位置都可以稳定并自锁。利用Fluent计算三种掠角极限状态下焦点对于重心位置的偏移情况,进一步验证飞机的运动前后限为±150mm,总行程300mm,满足分析要求。
在本申请提供的技术方案中,请参见图3,由图可知,所述掠角操纵机构5包括:掠角伺服舵机51,机翼安装底板52,机翼安装顶板53,从动齿轮54,转轴55,连接件56,加强筋57,掠角滑孔58,机翼59,所述机翼安装顶板53通过所述连接件56连接所述机翼安装底板52,所述掠角伺服舵机51设置在所述机翼安装顶板53上,且所述掠角伺服舵机51设有连接部的一端贯穿所述机翼安装顶板53,所述转轴55连接诉所述从动齿轮54,所述转轴55一端贯穿所述机翼安装顶板53,另一端贯穿所述机翼安装底板52,所述从动齿轮54连接所述掠角伺服舵机51的连接部,所述机翼安装底板52上设有所述掠角滑孔58,所述加强筋57设置在所述机翼安装底板52两侧,所述机翼59通过所述转轴55以及所述从动齿轮54连接所述掠角伺服舵机51,所述机翼安装底板52与所述主梁41端部铰连。
进一步地,所述机翼59包括:翼梁591,分力片592以及机翼本体593,所述翼梁591设置在所述机翼本体593内部,所述分力片592贯穿所述翼梁591,所述分力片592远离贯穿孔的一端贯穿所述掠角滑孔58,且与所述掠角滑孔58内壁相接触。
在实际应用中,机翼安装底板52两侧安装加强筋57完全加强了机翼安装底板52的结构强度,根据机翼参数,连接件56作为机翼限位板使用,另外,为了适应不同的机翼翼型和弦长,连接件56的距离也要贴合不同厚度的翼型进行设计;同时机翼安装底板52通过添加掠角滑孔58降低主旋转轴承担的升力剪力,采用两个接触点与机翼接触,并且触点与掠角滑孔58之间的滑动连接不影响机翼掠角的运动。因此本来完全加载在转轴上的机翼升力由于两个触点的存在,使得转轴的承力大为化解。
在本申请提供的技术方案中,请参见图4,由图可知,所述反角操纵机构6包括:反角伺服舵机61,减速齿轮62,曲轴63,曲轴连接轴64,曲轴联动片65,所述曲轴连接轴64贯穿所述支撑板42,以及所述减速齿轮62,所述曲轴连接轴64两端分别设置有所述曲轴63,所述反角伺服舵机61设置在所述曲轴连接轴64下部,且与所述减速齿轮62电动连接,所述曲轴联动片65上设有联动滑孔,所述曲轴联动片65通过所述联动滑孔可滑动的连接所述曲轴63,且所述曲轴联动片65设置在所述掠角操纵机构5上。
在实际应用中,曲轴63可在联动滑孔中滑动,从而使得机翼安装底板52绕反角转轴驱动机翼转动。本发明为了实现机翼反角和掠角同时可以变化而且不互相干扰,并把驱动构件所承受的载荷降低到一个能够实现的范围,采用偏移反角转轴的方法,而反角操纵轴相对掠角旋转轴有两种不同偏转方向,即:向机身内侧的正方向偏移和向机身外侧的负方向偏移。通过对反角伺服舵机61、材料强度的计算以及正方向偏移和负方向偏移优缺点比较后,本发明采用负方向偏移方法。此时,机翼安装底板52“分担”了反角操纵机构6中80%以上的驱动力。因此,反角的驱动和自锁也可以由常规的舵机完成。
在本申请提供的技术方案中,还提供了一种飞行器,请参见图5-图10,由图可知,所述飞行器包括上述翼盒。
在实际应用中,其中央翼盒的布局受限于机构运动和重量两个因素,因此中央翼盒大量采用碳纤维,凯夫拉等复合材料,以及铝合金等金属构成的翼盒本体1主梁41中央作为最基础的承力结构。机翼安装底板52,翼梁591,中央翼盒等关键受力结构均采用3K碳纤板作为制作材料。另外,综合考虑受力和质量,在一些非关键受力部位进行打减轻孔的处理。
在本申请提供的技术方案中,飞机机翼可以同时实现机翼前后位置,前后掠角,上下反角三个参数同时单独变化,或者通过编程实现联动的飞行平台。在本申请提供的技术方案中,飞机机翼前掠角极限角度可达35
本申请提供的实施例之间的相似部分相互参见即可,以上提供的具体实施方式只是本申请总的构思下的几个示例,并不构成本申请保护范围的限定。对于本领域的技术人员而言,在不付出创造性劳动的前提下依据本申请方案所扩展出的任何其他实施方式都属于本申请的保护范围。
- 用于将发动机支架安装至机翼盒的包括固定至所述机翼盒的上表面的配件的用于飞行器的组件
- 飞行器抗扭翼盒、飞行器机翼、飞行器以及支承构件