一种自动贴片上胶装置
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及装配机械领域,尤其涉及一种自动贴片上胶装置。
背景技术
现有晶环和晶片采用人工装配,人工装配劳动强度大,效率低。
发明内容
本发明的目的在于提供一种高效率的自动贴片上胶装置。
为实现上述目的,本发明采用以下技术方案:
一种自动贴片上胶装置,其包括:
机架,机架的中部固定有机台;
晶环供料机构,设置在机台的一侧,用于晶环的传递和进给;
晶片供料机构,设置在机台的一侧,用于晶片的传递和进给;
晶片翻转机构,设置在机台的一侧,用于晶片翻转,调节晶片的角度;
主工作台,设置在机台的中部,主工作台上设有装配台、机械手和点胶机构;
所述机械手的末端连接有第一手指夹持气缸,第一手指夹持气缸用于夹持晶片和晶环,所述机械手将晶片和晶环分别转送至装配台上进行装配;
所述点胶机构用于晶片和晶环装配过程中的点胶;
成品放置机构,设置在机台的另一侧,用于放置已装配好的成品。
进一步的,所述晶环供料机构包括料仓,料仓为圆柱形,料仓由第一旋转地基驱动做间歇性转动,所述料仓的周边沿圆周方向设有多个沿其轴向设置的料槽,所述料仓的盘侧设有由升降驱动器做升降的拨杆,拨杆的端部伸入处于上料位的料槽内,升降驱动器带动拨杆间歇性上升,从而将料槽内的晶环逐个顶出。
进一步的,所述晶片供料机构包括供料旋转盘,供料旋转盘由第二旋转电机驱动旋转,所述供料旋转盘上放置有多个间隔设置的供料周转盒,晶片放置于供料周转盒上。
进一步的,所述晶片翻转机构包括旋转气缸和第二手指气缸,第二手指气缸固定于旋转气缸的输出端,第二手指气缸用于夹持晶片,旋转气缸用于调节晶片的角度。
进一步的,所述机械手上设有第一视觉相机,第一视觉相机用于捕捉晶片和晶环的相对位置,通过视觉系统反馈以调节晶片和晶环的相对位置。
进一步的,所述点胶机构上设有第二视觉相机,第二视觉相机用于捕捉点胶控制机构的出胶量,通过视觉系统反馈以调节出胶量。
进一步的,所述机台上还设有点胶控制机,用于控制点胶机构的出胶量。
进一步的,所述主工作台下方设有第三视觉相机,第三视觉相机用于监视晶片和晶环装配的相对位置,通过视觉系统反馈以保证装配精度。
进一步的,所述主工作台上具有两个间隔设置的装配台。
进一步的,所述点胶机构设置在横移模组上,横移模组驱动点胶机构在两个装配台之间来回移动。
本发明采用以上技术方案,使晶片和晶环的装配更高效,节约工时,而且能够精密控制出胶量,装配位置精确,可靠性、一致性高,装配成本低廉。
附图说明
以下结合附图和具体实施方式对本发明做进一步详细说明;
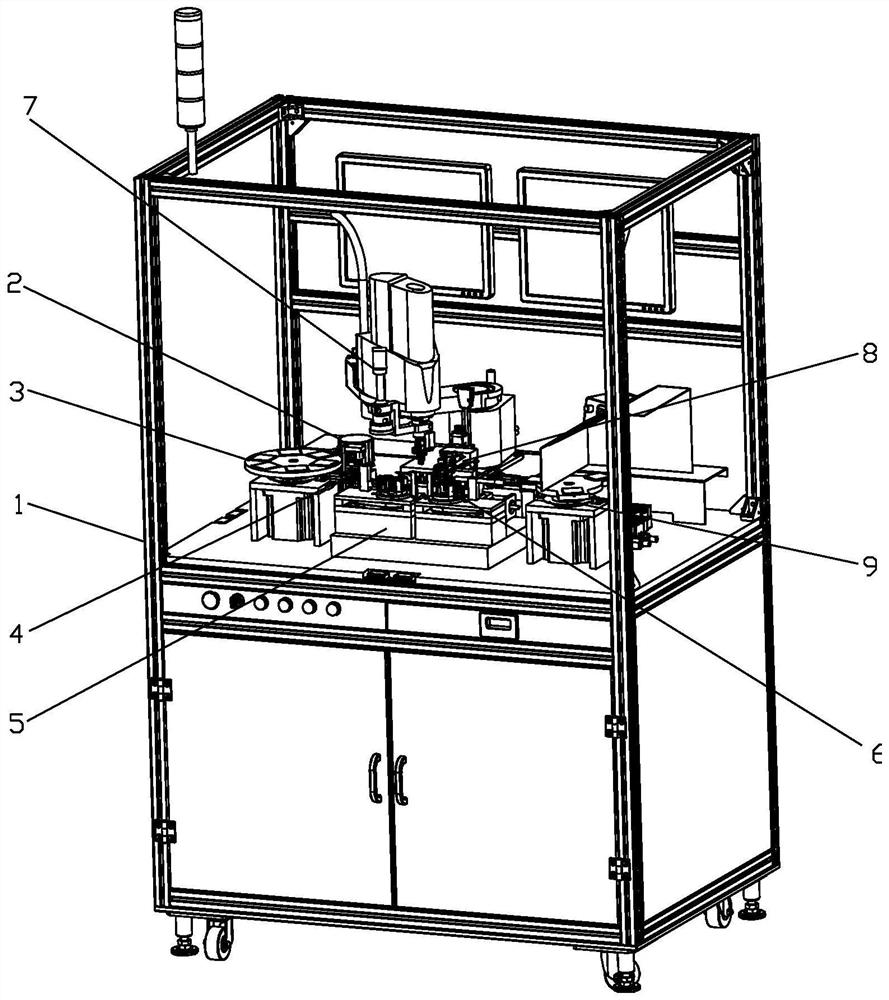
图1为本发明的立体图;
图2为图1中的局部视图;
图3为晶环供料机构的示意图;
图4为晶片供料机构的示意图;
图5为晶片翻转机构的示意图;
图6为成品放置机构的示意图;
图7为机械手的示意图;
图8为点胶机构的示意图。
具体实施方式
如图1-8所示,本发明一种自动贴片上胶装置,其包括:
机架1,机架1分为上下两层,机架1下层放置电气控制元件等,机架1的中部固定有机台;
晶环供料机构2,设置在机台的一侧,用于晶环的传递和进给;
晶片供料机构3,设置在机台的一侧,用于晶片的传递和进给;
晶片翻转机构4,设置在机台的一侧,用于晶片翻转,调节晶片的角度;
主工作台5,设置在机台的中部,主工作台5上设有装配台6、机械手7和点胶机构8;
所述机械手7的末端连接有第一手指夹持气缸,第一手指夹持气缸用于夹持晶片和晶环,所述机械手7将晶片和晶环分别转送至装配台6上进行装配;
所述点胶机构8用于晶片和晶环装配过程中的点胶;
成品放置机构9,设置在机台的另一侧,用于放置已装配好的成品。
机台的上方固定有显示器,通过操作软件设置点胶控制机的各种参数,通过操作软件控制各个机构的运动和位姿。
机架1的中部前方左侧安装有控制按钮;分为急停按钮、切换按钮、复位按钮、电源按钮;急停按钮控制设备的紧急停止;切换按钮切换设备处于自动模式、参数设定模式、人工返修模式;复位按钮控制设备各电机等复位到初始位置;电源按钮控制控制设备的电源输入。
机架1中部前方右侧安装有抽屉,抽屉内部安装有键盘、鼠标;通过鼠标和键盘操作控制设备的运行。
机架1上方安装有三色指示灯,用于指示设备的运行状态。
所述晶环供料机构2包括料仓21,料仓21为圆柱形,料仓21由第一旋转地基驱动做间歇性转动,所述料仓21的周边沿圆周方向设有多个沿其轴向设置的料槽22,所述料仓21的盘侧设有由升降驱动器做升降的拨杆23,拨杆23的端部伸入处于上料位的料槽22内,升降驱动器带动拨杆23间歇性上升,从而将料槽22内的晶环逐个顶出。
所述晶片供料机构3包括供料旋转盘31,供料旋转盘31由第二旋转电机驱动旋转,所述供料旋转盘31上放置有多个间隔设置的供料周转盒32,晶片放置于供料周转盒32上。
所述成品放置机构9包括成品旋转盘91,成品旋转盘91由第三旋转电机驱动旋转,所述成品旋转盘91上放置有多个间隔设置的成品周转盒92,晶片放置于成品周转盒92上。
供料周转盒32和成品周转盒92用的均是GEL-PAK盒,GEL-PAK盒是通讯行业常用的用于周转、储存、运输器件的防静电自吸附凝胶盒,直接使用GEL-PAK盒作为上料、下料周转盘,不需要额外的周转盒和上料、下料工装,节约工时,避免周转过程中引入新的风险。
所述晶片翻转机构4包括旋转气缸41和第二手指气缸42,第二手指气缸42固定于旋转气缸41的输出端,第二手指气缸42用于夹持晶片,旋转气缸41用于调节晶片的角度。
本发明中采用视觉系统控制装配精度和出胶量,具体如下:
所述机械手7上设有第一视觉相机71,第一视觉相机71用于捕捉晶片和晶环的相对位置,通过视觉系统反馈以调节晶片和晶环的相对位置。
所述点胶机构8上设有第二视觉相机,第二视觉相机用于捕捉点胶控制机构的出胶量,所述机台上还设有点胶控制机,用于控制点胶机构8的出胶量,通过视觉系统的图像识别和软件的闭环控制,通过电磁阀调节点胶控制机的进气压力精密控制胶针的出胶量。此外,通过点胶机构8的伺服步进电机精密控制胶针的移动,精密控制上胶的位置。
所述主工作台5下方设有第三视觉相机,第三视觉相机用于监视晶片和晶环装配的相对位置,通过视觉系统反馈以保证装配精度。
本实施例中,所述主工作台5上具有两个间隔设置的装配台6。所述点胶机构8设置在横移模组10上,横移模组10驱动点胶机构8在两个装配台6之间来回移动,实现两个装配台6共用同一个点胶机构8,节省设备空间,提高设备的利用率。
机器手7和晶片翻转机构4上的手指气缸上均安装有光电开关,通过调节遮光片和光电开关的相对位置,控制手指气缸闭合时左夹持块和右夹持块的相对位置,对不同尺寸的晶片、晶环都可实现快速稳定夹持。此外,两手指气缸末端的左夹持块为V型结构,右夹持块为平面结构,夹持时实现自动定位/定心功能。
本发明通过机械手7将晶片和晶环转移到装配台6上进行装配,并通过视觉系统控制装配位置和出胶量,保证装配精度。
上面结合附图对本发明的实施加以描述,但是本发明不局限于上述的具体实施方式,上述的具体实施方式是示意性而不是加以局限本发明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
- 一种自动贴片上胶装置
- 一种自动上胶贴片机