一种货叉挂钩焊接设备及焊接方法
文献发布时间:2023-06-19 12:08:44
技术领域
本发明涉及货叉生产领域,特别涉及一种货叉挂钩焊接设备及焊接方法。
背景技术
货叉,叉车属具,相当于挂装在叉车上的机械手。广泛应用于仓储、造纸、包装、印刷、烟草、家电、酒和饮料、毛棉纺织、港口码头,铁路、汽车制造、钢铁冶炼、化工和建筑等行业。除普通挂钩型货叉外,还可提供动荷货叉、防爆货叉、罩形叉架、折叠型货叉、套筒型货叉、货叉加长器、鼓筒型货叉、木质用货叉、方型货叉、仿形货叉等特殊货叉。
目前重型货叉焊接采用半自动人工操作,使现场环境和劳动力及效率低。由于目前重型货叉焊接是单工位单工件操作,在制作过程中,对劳动力消耗很大、用工多、生产效率低;虽也有采用半自动,但其现场环境差、成本高、长期工作时质量稳定性不好。
发明内容
针对以上现有技术存在的缺陷,本发明的主要目的在于克服现有技术的不足之处,公开了一种货叉挂钩焊接设备,包括:
上料机构,对货叉进行暂存和整理;
卧式三轴变位机,装夹固定货叉并转动改变货叉姿态位置;
焊接机器人,对货叉进行焊接。
下料机构,将货叉运输离开生产区;
搬运机器人,将货叉从所述上料机构搬运至所述卧式三轴变位机并将焊接完成的货叉搬运至所述下料机构。
进一步地,所述上料装置包括包括运输机构和整理机构,所述整理机构设置在所述运输机构的出口端,利用所述运输机构将货叉运送到所述整理机构处;
所述整理机构包括整理支架、整理平台以及设置在所述整理支架上的三组送料机构,利用一所述送料机构抬举所述货叉离开所述运输机构并Z轴方向移动,利用另一所述送料机构所述第一送料机构上的所述货叉沿Y轴方向推动至所述整理平台上,利用后一所述送料机构推动所述整理平台上的货叉沿X轴方向移动;所述整理平台的一侧向上设置Y-Z向基准板,相邻一侧向下设置X-Z向基准板。
进一步地,所述送料机构包括固定架、导杆、推板和气缸,所述气缸固定设置在所述固定架上,所述气缸的两侧分设所述导杆,并且与所述固定架滑动连接,所述推板设置在所述导杆和所述气缸上,利用所述气缸驱动所述推板沿所述导杆引导方向移动。
进一步地,所述运输机构包括运输支架、驱动电机、链轮、传动轴、传动链轮和输送滚子链,所述传动轴分设在所述运输支架的两端,所述链轮分设在所述传动轴上,所述输送滚子链覆盖在两端的所述链轮上,所述传动链轮分别设置在一所述传动轴和所述驱动电机上,并通过链条链接,利用所述驱动电机驱动所述传动轴使所述输送滚子链运动。
进一步地,所述运输支架包括底座和横梁,所述横梁设置三条,三条所述横梁平行且间隔架设在所述底座上,所述链轮位于所述横梁的两端,利用所述横梁支撑所述输送滚子链。
进一步地,所述上料机构还包括预热系统,所述预热设置设置在所述整理支架的一侧,利用所述预热系统对处于所述整理平台上的货叉进行火焰加热。
进一步地,所述搬运机器人设置在加工区的中间,上下两端分别设置所述上料机构和所述下料机构,所述卧式三轴变位机分设在所述搬运机器人的左右两侧,所述焊接机器人在所述卧式三轴变位机的外侧。
进一步地,所述搬运机器人包括机械手和设置在所述机械手端部的夹取装置;
所述夹取装置包括安装板、连接法兰、固定座、滑动座、滑动机构、第一连杆、第二连杆、第三连杆和致动器,所述安装板通过连接法兰与所述机械手连接,所述固定座安装于所述安装板上,所述滑动座通过所述滑动机构滑动设置在所述安装板上,且所述滑动座与所述固定座相对设置,所述第二连杆铰接在所述安装板上,所述第一连杆两端分别与所述滑动座和所述第二连杆铰接,所述第三连杆的两端分别与所述第二连杆和所述致动器铰接,利用所述致动器驱动所述第三连杆带动所述第二连杆,使第一连杆推动所述滑动座向所述固定座移动,所述固定座和所述滑动座相对面设置夹板。
进一步地,所述致动器固定安装在所述安装板安装有所述连接法兰的一侧,所述安装板上设置容许所述致动器驱动端穿过的通孔,所述致动器的驱动端穿过所述通孔与所述第三连杆连接。
一种货叉挂钩焊接方法,使用上述货叉挂钩焊接设备,包括以下步骤:
步骤1,作业员将货叉放置在上,利用上料机构将货叉进行整理并运送至搬运机器人抓取位置;
步骤2,搬运机器人将货叉抓取至卧式三轴变位机,并夹紧于所述卧式三轴变位机上,通过所述卧式三轴变位机将货叉旋转至焊接机器人处,所述焊接机器人进行挂钩焊接,所述卧式三轴变位机的另一侧工位同步进行上料;
步骤3,焊接完成后,再次利用所述卧式三轴变位机将货叉旋转至所述搬运机器人处,利用所述搬运机器人将焊接完成的货叉搬运至下料机构,并将未焊接的货叉搬运至所述卧式三轴变位机上;
其中,步骤2中,货叉在焊接时,所述卧式三轴变位机将货叉旋转至竖向。
本发明取得的有益效果:
工人将工件放置在运输机构后,通过搬运机器人和上下料输送线,实现自动化上下料,提高了工件的周转率,节约了搬运所需的人力,并且无需额外的搬运工具,减少了厂房设置要求,整体上大幅降低了生产成本;上料机构对工件进行运输和定位,方便搬运机器人抓取;卧式三轴变位机的底部大回转,将变位机分为内部搬运侧和外部焊接侧,实现焊接和搬运互不干涉,配合搬运机器人和焊接机器人,大幅提高了设备运行效率;另外配合预热系统,在上料机构处就对工件进行预热,完成工件在整个工艺流程中的预热工艺,进而提高焊接机器人的焊接效率。
附图说明
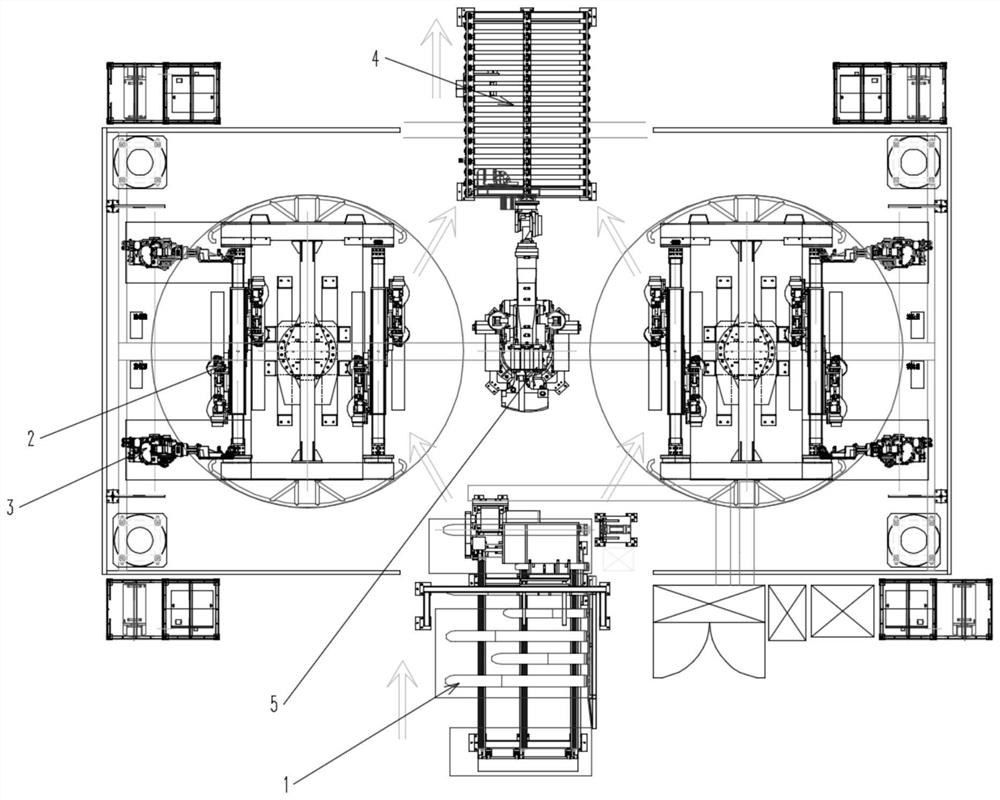
图1为本发明一种货叉挂钩焊接设备的结构示意图;
图2为上料机构的主视图;
图3为上料机构的俯视图;
图4为上料机构的左视图;
图5为焊接机器人、搬运机器人及卧式三轴变位机的配合示意图;
图6为搬运机器人的结构示意图;
图7为夹取装置的立体结构示意图;
图8为夹取装置的另一视角的立体结构示意图;
附图标记如下:
1、上料机构,2、卧式三轴变位机,3、焊接机器人,4、下料机构,5、搬运机器人,60、机械手,11、运输机构,12、整理机构,13、导板,111、运输支架,112、驱动电机,113、链轮,114、传动轴,115、传动链轮,116、输送滚子链,121、整理支架,122、整理平台,123、送料机构,131、导边,1111、底座,1112、横梁,1221、X-Z向基准板,1222、Y-Z向基准板,1231、固定架,1232、导杆,1233、推板,1234、气缸,51、安装板,52、连接法兰,53、固定座,54、滑动座,55、滑动机构,56、第一连杆,57、第二连杆,58、第三连杆,59、致动器,510、夹板,511、第二定位槽,5101、第一定位槽。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图及实施例对本发明作进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
一种货叉挂钩焊接设备,如图1所示,包括:
上料机构1,对工件进行暂存和整理;
卧式三轴变位机2,固定工件并转动改变工件空间位置;
焊接机器人3,对工件进行焊接。
下料机构4,将工件运输离开生产区;
搬运机器人5,将工件从上料机构1搬运至卧式三轴变位机2并将焊接完成的工件搬运至下料4机构。
在上述实施例中,如图1所示,搬运机器人5设置在加工区的中间,上下两端分别设置上料机构1和下料机构4,卧式三轴变位机2分设在搬运机器人5的左右两侧,焊接机器人3在卧式三轴变位机2的外侧。搬运机器人5不断的将入料机构1上的工件搬运至两侧的卧式三轴变位机2,并从卧式三轴变位机2将工件搬运至下料机构4,进而在上下左右方向不断的进行操作,提高了焊接效率。
如图2-4所示,上料装置1包括运输机构11和整理机构12,整理机构12设置在运输机构11的出口端,利用运输机构11将货叉运送到整理机构12处;
整理机构12包括整理支架121、整理平台122以及设置在整理支架121上的三组送料机构123,如图所述,第一送料机构安装于整理平台122的入口侧,通过运输机构11将货叉运送至送料机构上,以通过第一送料机构将货叉沿Z轴方向移动,并使得货叉与整理平台122等高。第二送料机构水平安装在整理平台122的入口端,当第一送料机构将货叉抬升到目标位置后,通过第二送料机构将货叉沿Y轴方向推至整理平台122上;第三送料机构设置在整理平台的旁边,通过第三送料机构将整理平台122上的货叉沿X轴移动。其中,整理平台122的靠近第三送料机构的一侧向下设置X-Z向基准板1221,整理平台122的出口侧向上设置Y-Z向基准板1222,通过Y-Z向基准板221、X-Z向基准板222及水平设置的整理平台相互配合,实现对货叉两侧的校准,进而保证货叉每次均在同一位置。
在一实施例中,如图2-4所示,送料机构123包括固定架1231、导杆1232、推板1233和气缸1234,气缸1234固定设置在固定架1231上,气缸1234的两侧分设导杆1232,并且与固定架1231滑动连接,推板1233设置在导杆1232和气缸1234上,利用气缸1234驱动推板沿导杆1232引导方向移动。三组送料机构采用相同的结构,仅存在尺寸及为适应安装环境而做出的适应性结构调整。
在一实施例中,如图2-4所示,运输机构11包括运输支架111、驱动电机112、链轮113、传动轴114、传动链轮115和输送滚子链116,传动轴114分设在运输支架111的两端,链轮113分设在传动轴114上,输送滚子链116覆盖在两端的链轮113上,传动链轮115分别设置在一传动轴114和驱动电机112上,并通过链条链接,利用驱动电机带动传动链轮115转动,使得传动轴114驱动链轮113使得输送滚子链116运动,货叉放置在输送滚子链116上,以实现对货叉的传送。
在上述实施例中,如图2-4所示,运输支架111包括底座1111和横梁1112,横梁1112设置三条,三条横梁1112平行且间隔设置在底座1111上;对应的,链轮113设置三组,分别位于横梁的两侧;利用横梁1112支撑输送滚子链116。
在一实施例中,如图2-4所示,运输机构11的一侧设置导板13,且在入口端设置导边131。作业员将货叉放置在运输机构11的一端,利用运输机构11向整理机构12移动,同时受到导板13的引导,使得货叉沿X轴向移动,实现对货叉的粗调整。
在一实施例中,如图2-4所示,在运输支架111上还安装有到位传感器(未示出),到位传感器安装与第一送料装置位置相对应,用于感应货叉是否运输到位;即当到位传感器感应到货叉时,运输机构11停止,此时货叉处于第一送料装置上方。
在一实施例中,上料装置1还包括预热系统14,预热系统14设置在整理支架121一侧,利用预热系统14对工件进行预加热,提高焊接机器人3的焊接速度;预热系统13包括火焰喷射器及配套的点火装置、自动控制系统;通过自动控制系统自动控制燃气及氧气的通断,根据生产要求进行点火及灭火。
下面针对上料装置具体阐述其工作过程,如图2-4所示,作业员将货叉放置在运输机构11上,通过运输机构11将货叉沿Y轴方向移动,当到位传感器感应到货叉时,启动整理机构12将一货叉抬升至搬运机器人的抓取位置,同时预热系统14工作,对剩余货叉进行预热;具体的,通过第一送料装置将货叉抬升至与整理平台122等高位置,而后通过第二送料装置将货叉推至整理平台122且顶紧于Y-Z向基准板1222,最后通过第三送料机构将货叉向X轴向移动,使得货叉顶紧于X-Z向基准板1221。而后各送料装置复位,完成一货叉供料;进入下一货叉供料,重新启动运输机构11。
卧式三轴变位机2使用中国专利CN209532555 U一种立式变位机中记载的设备。通过卧式三轴变位机2实现水平回转,并且在两侧设置可竖直旋转的工件安装平台;工件安装平台的两侧均设置安装工位,通过翻转工件安装平台以实现工件切换。另外,在焊接时,工件安装平台翻转至竖向,到达图5所示状态,使得工件靠近旋转中心,在焊接或货叉装卸时,尽可能减少相互影响。卧式三轴变位机的底部大回转,将变位机分为内部搬运侧和外部焊接侧,实现焊接和搬运互不干涉,配合搬运机器人和焊接机器人,大幅提高了设备运行效率。
如图6-8所示,搬运机器人5包括机械手60和设置在机械手端部的夹取装置。其中,夹取装置包括安装板51、连接法兰52、固定座53、滑动座54、滑动机构55、第一连杆56、第二连杆57、第三连杆58和致动器59,连接法兰52和固定座53安装于安装板51上,通过连接法兰52与机械手60连接,滑动座54通过滑动机构55滑动设置在安装板51上,且滑动座54与固定座53相对设置,第二连杆57铰接在安装板51上,第一连杆56两端分别与滑动座54和第二连杆57铰接,第三连杆58的两端分别与第二连杆57和致动器59铰接,致动器59驱动第三连杆58推动第二连杆57转动,第二立杆7推动第一连杆56使滑动座54向固定座53方向移动,夹板510分别安装在固定座53和滑动座54上,且相对设置。优选的,夹板510通过螺丝进行固定,可实现快速拆卸,并且能够根据不同尺寸的货叉选择不同夹板510。其中,致动器59使用气缸。滑动机构55为直线导轨。
在一实施例中,如图6-8所示,夹板510上相邻两侧边上设置第一定位槽5101,并且在固定座53和滑动座54的对应位置设置配合的第二滑动槽11。由于夹板510通过螺丝进行固定,因此,在固定前,需要将螺孔进行对应;在安装时,第一定位槽5101和第二定位槽511通过键连接,并且同时对两个方向进行定位;另外,第一定位槽5101和第二定位槽511均在侧边,能够快速的对夹板510进行定位,进而实现夹板510的快速安装。
在一实施例中,如图6-8所示,致动器59固定安装在安装板51安装有连接法兰52的一侧,安装板51上设置容许致动器59驱动端穿过的通孔,致动器59的驱动端穿过通孔与第三连杆58连接。由于连接法兰52与机械臂连接需要一定的空间,致动器59巧妙的利用该部分空间,进而使得设备更加紧凑,进而减小夹取装置的体积。
使用时,致动器59的驱动端向下移动,通过第三连杆58驱动第二连杆57转动,进而驱动第二连杆57使第一连杆56推动滑动座54移动,巧妙的了用杠杆机构,再放大了夹紧力的同时减小了夹具的占用空间。
下料机构4可以使用滚筒输送机。
本发明还公开了一种货叉挂钩焊接设备及焊接方法,包括以下步骤:
步骤1,作业员将货叉放置在上,利用上料机构将货叉进行整理并运送至搬运机器人抓取位置;
步骤2,搬运机器人将货叉抓取至卧式三轴变位机,并夹紧于所述卧式三轴变位机上,通过所述卧式三轴变位机将货叉旋转至焊接机器人处,所述焊接机器人进行挂钩焊接,所述卧式三轴变位机的另一侧工位同步进行上料;
步骤3,焊接完成后,再次利用所述卧式三轴变位机将货叉旋转至所述搬运机器人处,利用所述搬运机器人将焊接完成的货叉搬运至下料机构,并将未焊接的货叉搬运至所述卧式三轴变位机上;
其中,步骤2中,货叉在焊接时,所述卧式三轴变位机将货叉旋转至竖向。
以上仅为本发明的较佳实施例,并非用来限定本发明的实施范围;如果不脱离本发明的精神和范围,对本发明进行修改或者等同替换,均应涵盖在本发明权利要求的保护范围当中。
- 一种货叉挂钩焊接设备及焊接方法
- 一种保险杠焊接设备的挂钩定位夹具