一种大中型机械作业状态监控系统
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及大中型机械安全技术领域,尤其涉及一种大中型机械作业状态监控系统。
背景技术
随着工业技术的不断进步,基础设施大规模建设也越来越多,大型的高空作业也越来越多,大量超高工程建设项目的开展,促使超高吊装作业的需求也不断增加;大型吊装服务主要应用于海洋工程装备、电力建设、航天工程、基础建设、煤化工、石油化工、冶金建设等下游行业,其吊装的高度已经超过了120米。
但是这种超高的吊装作业,随着高度的增加,吊装的风险也越来越大;不安全的因素很多,包括吊机本身吊装重量、吊机间安全问题及外部环境因素等。
具体包括:当多台吊机同时交叉作业时,如几台塔式起重机同时交叉作业,或塔式起重机与履带吊同时交叉作业,在工作过程中,极容易发生多台吊机的臂架之间、臂架与吊钩的钢丝绳之间相互碰撞的情况,引发安全事故。
另外外部环境中的风速对高空吊装作业的影响;风速对高空吊装作业十分明显,在吊机的吊装过程中,吊装铁塔吊件(包括其他物体)均会受风速影响,风力造成吊装作业设备的工作臂及起吊构件摆(晃)动,直接影响作业工作安全。故在吊装作业的规范中,普遍都会规定如遇风速大于10.8m/s大风或阵风时,吊装作业机械应立即停止作业。但在实际应用过程中,却会出现很多不确定的因素;比如超高空中所受的风力与地面是否是横切风,风力的方向是否一致,都是不确定的,而这种横切风对吊装作业的影响要比单纯的同一风向的风力危害大得多;另一方面,对于不同高度的吊装作业设备,都是采用同一样的限定风速,对于以前相对高度差别不大的吊装作业设备来说,尚是可取的;但是对于现在出现的超高吊装作业设备,顶面的气候条件和风速很有可能与地面是不一样的,再按照统一的风速限定,明显已经是不合理的了;而且对于风速耦合风向,怎样去识别也都是值得解决的问题,因此很有必要对此加以研究改进。
发明内容
本发明要解决的技术问题是提供一种大中型机械作业状态监控系统,解决了现有技术中大中型机械无法实时监控预警的问题,包括吊机本身载重、吊机间防碰撞及外部环境因素对吊装过程中的影响,本发明通过采集终端的设置,将各类监控数据进行采集,实现吊机就地端作业状态数据、视频信息在数据服务平台及手机端的实时传输和在线监控,确保了作业过程中的安全。
本发明为了解决现有技术问题所采用的技术方案如下:
提供一种大中型机械作业状态监控系统,所述大中型机械包括吊机,包括信息采集层、信息传输层和数据服务平台,所述信息传输层用于信息采集层与数据服务平台间的数据传输与通信;所述信息采集层包括若干采集终端用于数据的采集,所述采集终端包括重量传感器、雷达传感器、风速测量仪、角度传感器、幅度传感器、高度编码器、方位传感器和高清摄像头;所述信息传输层包括GPRS模块和/或传输电缆实现无线和/或有线信号的传输;所述采集终端将采集到的数据经无线和/或有线信号传输至所述数据服务平台,所述数据服务平台根据吊机安全操作规程要求设定预警值及极限值,并对采集到的的数据进行监控和判断。
进一步地,所述重量传感器包括设置在定滑轮系上的三滑轮式传感器和/或设置在卷筒的轴承支座上的板环式传感器用于检测所述吊机起重重量,当所述重量传感器为三滑轮式传感器时,用于吊机起吊重物的钢绳穿过所述三滑轮式传感器;通过不同类型的传感器的设置能够更好的适配不同类型的吊机,亦或通过双传感器的设置增加称重精度及可靠性。
具体的,所述重量传感器精度为重量显示误差≤±3%,且不超过0.5t;高精度重量传感器保证了超载预警的准确性,更大程度的保证了安全。
进一步地,所述吊机的臂架上设置多个雷达传感器,以检测相邻吊机之间的距离,防止吊机之间在交叉作业范围内发生碰撞,将多个雷达传感器通过连接装置均匀设置在臂架上;每个雷达传感器所检测的当前相邻吊机之间的距离,并根据数据服务平台内设定的预警值及极限值对每个雷达传感器所检测的当前相邻吊机之间的距离进行多重报警;当相邻吊机之间的距离达到设定的极限值时,吊机的臂架停止并向远离相邻吊机的一侧回转。
具体的,雷达传感器通过连接装置固定连接在起重臂臂杆的侧壁上,连接装置包括连接扣,连接扣设置于起重臂臂杆的侧壁上,连接扣上设有用于固接雷达传感器的连接板;位于起重臂臂杆两侧的连接扣通过连接柱连接;连接扣上设有多个用于连接连接柱的第一连接孔和用于供线缆穿过的第二连接孔。
优选的,每个连接柱连接两个连接扣,每个连接扣上可设置一个或多个连接板。
优选的,连接扣为L型,包括第一扣板和第二扣板,第一扣板用以连接连接板,第二扣板用以与起重臂的臂杆连接。
进一步地,所述相邻吊机上同时设置数量相等的雷达传感器,相邻两吊机间的雷达传感器两两为一组,根据相邻两吊机间的交叉作业范围设置多组雷达传感器。
进一步地,所述风速测量仪设置在吊机顶端和/或底部。
进一步地,在吊机的顶端和底部空旷位置分别同时安装风速测量仪是在吊机的提升滑轮顶部设置第一风速测量仪,同时在吊机的底部周围的任意空旷位置上也设置第二风速测量仪;由第一风速测量仪采集吊机的提升滑轮位置的风速信号,由第二风速测量仪采集吊机的底部周围的风速信号;所述数据服务平台对所述第一风速测量仪和第二风速测量仪的数据进行处理。
进一步地,对所述第一风速测量仪和第二风速测量仪的数据进行处理过程包括:将第一风速测量仪采集的风速信号设为高层风速信号,将第二风速测量仪采集的风速信号为低层风速信号,通过将高层风速信号和低层风速信号进行矢量叠加,形成综合风速信号,通过综合风速信号判定风速对吊机的作业影响度,从而确定是否达到预警或停止作业的条件。
进一步地,所述采集终端走线沿固定绳且所述采集终端信号线长度略大于固定绳长度,所述固定绳固定在臂架上;采集终端上的信号线垂直引出。
进一步地,所述经无线和/或有线信号传输至所述数据服务平台的数据同步在手机端实时显示吊机现场作业环境下的数据。
有益效果如下:
本发明解决了现有技术中大中型机械无法实时监控预警的问题,包括吊机本身载重、吊机间防碰撞及外部环境因素对吊装过程中的影响,本发明通过采集终端的设置,将各类监控数据进行采集,实现吊机就地端作业状态数据、视频信息在数据服务平台及手机端的实时传输和在线监控,确保了作业过程中的安全。
附图说明
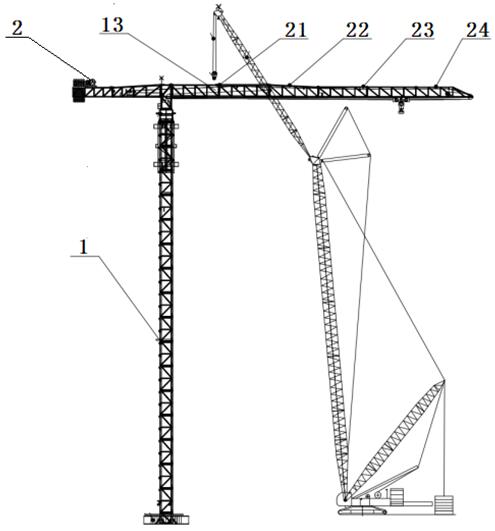
图1为吊机工作状态示意图;
图2为雷达传感器在臂架上的安装结构示意图;
图3为风速测量仪安装位置示意图;
图4为平臂式塔吊和履带式起重机间的交叉作业范围示意图。
具体实施方式
下面结合具体实施方式对本发明作进一步的说明。其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
实施例1
本实施例提供一种大中型机械作业状态监控系统,本实施例中大中型机械为平臂式塔吊,包括信息采集层、信息传输层和数据服务平台,信息传输层用于信息采集层与数据服务平台间的数据传输与通信;信息采集层包括若干采集终端用于数据的采集,采集终端包括重量传感器、雷达传感器、风速测量仪、角度传感器、幅度传感器、高度编码器、方位传感器和高清摄像头;信息传输层包括GPRS模块和/或传输电缆实现无线和/或有线信号的传输;采集终端将采集到的数据经无线和/或有线信号传输至所述数据服务平台,数据服务平台根据吊机安全操作规程要求设定预警值及极限值,并对采集到的的数据进行监控和判断。
如图1所示,本实施例中重量传感器包括设置在卷筒的轴承支座2上的板环式传感器用于检测所述吊机起重重量,重量传感器精度为重量显示误差≤±3%,且不超过0.5t。
如图1~2所示,本实施例中,吊机1的臂架13上设置四个雷达传感器21、22、23、24,以检测相邻吊机之间的距离,防止吊机之间在交叉作业范围内发生碰撞;将四个雷达传感器通过连接装置均匀设置在臂架13上;每个雷达传感器所检测的当前相邻吊机之间的距离,并根据数据服务平台内设定的预警值及极限值对每个雷达传感器所检测的当前相邻吊机之间的距离进行多重报警;当相邻吊机之间的距离达到设定的极限值时,吊机的臂架停止并向远离相邻吊机的一侧回转。
本实施例中的四个雷达传感器21、22、23、24均通过连接装置固定连接在臂架13的侧壁上,连接装置包括连接扣4,连接扣4上设有用于固接雷达传感器的连接板6且连接扣4通过连接柱5连接;连接扣4为L型,包括第一扣板43和第二扣板43,第一扣板42用以连接连接板6,第二扣板43用以与臂架13连接。
如图3所示,本实施例中,在吊机的顶端和底部空旷位置分别同时安装风速测量仪是在吊机的提升滑轮顶部设置第一风速测量仪7,同时在吊机的底部周围的任意空旷位置上也设置第二风速测量仪8;由第一风速测量仪7采集吊机的提升滑轮位置的风速信号,由第二风速测量仪8采集吊机的底部周围的风速信号;数据服务平台对第一风速测量仪7和第二风速测量仪8的数据进行处理,具体处理过程包括:将第一风速测量仪7采集的风速信号设为高层风速信号,将第二风速测量仪8采集的风速信号为低层风速信号,通过将高层风速信号和低层风速信号进行矢量叠加,形成综合风速信号,通过综合风速信号判定风速对吊机的作业影响度,从而确定是否达到预警或停止作业的条件。
本实施例中,采集终端走线沿固定绳且所述采集终端信号线长度略大于固定绳长度,所述固定绳固定在臂架上;采集终端上的信号线垂直引出。
本实施例中,经有线信号传输至所述数据服务平台的数据同步在手机端实时显示吊机现场作业环境下的数据。
实施例2
与实施例1不同之处在于,本实施例中的吊机为履带式起重机,本实施例中的重量传感器为三滑轮式传感器,设置在定滑轮系上,三滑轮式传感器通过安装架固定安装在臂架上,与吊机上的滑轮系配合,用于吊机起吊重物的钢绳穿过三滑轮式传感器。
实施例3
本实施例中,提供了平臂式塔吊与履带式起重机间的防碰撞工作过程,如下:如图4所示,履带式起重机的塔式副臂的摆动方向如附图4中N线所示,履带式起重机的塔式副臂的摆动轨迹如附图4中S线所示,履带式起重机与平臂式塔吊的交叉作业范围如附图4中M区域所示。
本实施例里使用的雷达传感器2为毫米波雷达传感器,毫米波的波长介于厘米波和光波之间,兼有微波制导和光电制导的优点,且毫米波雷达传感器体积小、易集成却空间分辨率高,便于提高检测的准确性。本实施例里的雷达传感器对小型障碍物的检测范围是0.7~10m,雷达传感器对大型障碍物的检测范围是0.7~30m;本实施例里的雷达传感器的探测范围为以其垂直中轴线为基准的左右各50度,即雷达传感器的探测水平覆盖角度为100度;本实施例里的雷达传感器的探测范围为以臂架为基准的上下各7度,即雷达传感器的探测俯仰角度为14度。本领域技术人员也可以根据实际工况来设置雷达传感器的检测范围和探测角度。
其中,通过显示主机设置雷达传感器的安全探测距离和预警距离,其中将安全探测距离设置为大于15m,将预警距离设置为15m以下;数据服务平台的显示主机上实时显示每个雷达传感器所检测的起重臂与塔式副臂之间的距离,当距离小于15m时,发出警报。
其中,在不同的距离范围内由报警系统发出不同的警报信号进行多重警报,多重警报具体为三重警报,分别为在15m、10m和3.5m时分别发出警报,且当发出3.5m警报时,起重臂停止并向远离塔式副臂的一侧回转。
显然,上述实施例仅仅是为清楚地说明本发明的技术方案所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护之内。
- 一种大中型机械作业状态监控系统
- 一种机器人自动钻铆作业状态实时监控系统及方法