一种蚕茧下茧实时检测方法
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及一种蚕茧下茧实时检测方法,属于蚕桑业加工技术领域。
背景技术
蚕茧生产加工过程中选茧是指根据制丝工艺要求对不能缫丝的下茧进行剔除的工序,为提高茧丝质量,在缫丝前需要对蚕茧进行选茧工序。目前,常用选茧方法是以人工目测,手工分拣为主。容易受人的主观意识和情绪影响,劳动强度大、效率低,而且人与人个体之间区别也比较大,从而导致无法按照统一标准进行评判。为实现蚕桑产业可持续发展,实现中国蚕桑产业现代化,选茧机的机械化和智能化是增加蚕桑企业产品附加值,提高技术竞争力,实现可持续发展的必有之路。
发明内容
本发明针对现有蚕茧分选的问题,提出一种蚕茧下茧实时检测方法,本发明通过对YOLOv3深度学习目标检测算法进行基于锚点框参数预置、通道剪枝和嵌入感受野模块改进后以在蚕茧生产加工过程中选茧时对下茧进行实时检测;蚕茧分选机根据下茧实时检测方法输出的坐标对下茧进行抓取剔除,对上车茧收集储存,从而提高了蚕茧生产加工的生产效率及茧丝质量,降低生产成本。本发明方法的蚕茧分选机具有结构简单、分选质量精准、工作效率高等特点。
本发明为解决其技术问题而采用的技术方案是:
一种蚕茧下茧实时检测方法,具体步骤如下:
1)以薄皮茧、瘪茧、特小茧、黄斑茧为检测目标,对检测目标进行不同位置和不同角度进行拍摄,采集下茧检测数据集;
2)利用插值算法将下茧检测数据集变换成416×416的图像,并将图像划分为训练集和测试集;其中训练集与测试集的图像数量比为3:1;
3)利用labelⅠmg标注工具对训练集和测试集中的图像进行标注;所述标注为对每幅图像上所有识别的物体标出相对应的下茧类别的边界框;
4)以YOLOv3模型为基础模型,利用训练集中标注的图像对模型进行训练,进行超参数搜索与进化得到进化新一代,并通过适应度函数判断是否进化,适应度越高,代表这一代的性能越好,从而进化搜索选择适合下茧检测数据集的超参数;
5)设置改进YOLOv3模型的进化超参数,将预训练权载入改进YOLOv3模型中进行训练,得到最优训练权重;
6)将最优训练权重载入改进YOLOv3模型中对测试集中的图像进行测试;
7)重复步骤5)和6)得到最优YOLOv3模型作为下茧实时检测方法。
所述步骤5)改进YOLOv3模型为:
a.通过对YOLOv3模型的锚点框尺寸和数量进行K-means聚类分析来选择适用于下茧检测数据集的锚点框参数;
b.采用通道稀疏化后基于批量正则化层(BN)缩放因子的模型剪枝方法对YOLOv3模型进行压缩;
c.将感受野模块RFB嵌入YOLOv3模型中以增加模型的局部感受野。
进一步的,所述采用通道稀疏化后基于批量正则化层(BN)缩放因子的模型剪枝方法对YOLOv3模型进行压缩的具体方法为
对YOLOv3模型中BN层的每一个通道均引入缩放因子γ进行L1正则化,若缩放因子γ在L1正则化的约束下趋近于0,则此通道在模型中对特征图预测的贡献程度低,进行剪枝。
更进一步的,缩放因子γ为需要训练的参数,取值为0<γ;
蚕茧下茧实时检测方法所采用的蚕茧分选机,包括依次连接的上料装置、输送装置、图像采集装置、下茧抓取装置和上车茧储存装置,
上料装置用于蚕茧上料;
输送装置用于输送蚕茧;
图像采集装置用于对输送装置上的蚕茧进行拍照,获取蚕茧图像;
下茧抓取装置用于对蚕茧进行抓取剔除;
下茧抓取装置用于对下茧进行储存;
上车茧储存装置用于对上车茧进行储存;
上料装置包括输料斗1,输料斗1设置在输送装置的进料端;输送装置包括传送带6、输送装置机架24和电机30,传送带6设置在输送装置机架24顶端,电机30设置在输送装置机架24的顶部侧端,电机30的输出轴与传送带6传动连接;图像采集装置包括工业相机8,工业相机8设置在输送装置中部的正上方;下茧抓取装置包括若干个吸盘10,吸盘10设置在输送装置末端的上方;下茧抓取装置包括储料斗Ⅰ20,储料斗Ⅰ20设置在传送带6的侧端,蚕茧储存时,储料斗Ⅰ20位于吸盘10的正下方;上车茧储存装置设置在传送带6的末端正下方;
优选的,上车茧储存装置为储料斗Ⅱ36;
优选的,传送带6的初始端包覆设置在从动转轴上,传送带6的末端包覆设置在主动转轴上,从动转轴和主动转轴平行设置,电机30的输出轴与主动转轴的端头连接;
优选的,蚕茧分选机还包括控制器25,输送装置、图像采集装置、下茧抓取装置均与控制器25连接;
更优选的,电机30、工业相机8和吸盘10均与控制器25连接;
所述上料装置还包括输料斗安装支承26,输料斗1固定设置在输料斗安装支承26的顶端;
进一步的,所述上料装置还包括输料斗安装角件3、脚蹄Ⅰ27和脚蹄安装板Ⅰ28,输料斗1的输出端通过输料斗安装角件3固定设置在输送装置的进料端,输料斗安装支承26的底端通过脚蹄安装板Ⅰ28设置有脚蹄Ⅰ27;
所述输送装置还包括传送带导轨29、前挡板2、毛刷5和挡板23,传送带导轨29固定设置在输送装置机架24顶端,挡板23垂直设置在传送带导轨29上且挡板23位于传送带6的两侧,前挡板2固定设置在传送带导轨29的初始端,毛刷5固定设置在输送装置机架24顶端且毛刷5位于输送装置的进料端;传送带10的两侧滑设在传送带导轨29内;
从动转轴和主动转轴分别设置在输送装置机架24的两端,从动转轴和主动转轴可在输送装置机架24的两端转动;
所述前挡板2可防止上料装置上料后蚕茧掉落,挡板23可避免蚕茧传输过程中掉落,毛刷5可将输送带上的蚕茧刷平,保证蚕茧不堆叠起来,保证每一次向前输送一层蚕茧;
进一步的,所述输送装置还包括脚蹄Ⅱ和脚蹄安装板Ⅱ,输送装置机架24的底端通过脚蹄安装板Ⅱ设置有脚蹄Ⅱ,毛刷5通过毛刷安装板4固定设置在输送装置机架24顶端;
所述图像采集装置还包括图像采集装置安装支承22和LED光源33,工业相机8固定设置在图像采集装置安装支承22顶端中心,LED光源33固定设置在图像采集装置安装支承22顶端且LED光源33位于工业相机8的两侧;
优选的,LED光源33与控制器25连接;LED光源用于提供稳定的光照条件;
进一步的,所述图像采集装置还包括相机安装板7、和相机安装角件9,相机安装板7水平设置在图像采集装置安装支承22的顶端,相机安装角件9竖直设置在相机安装板7的顶端中心,工业相机8的底端固定设置在相机安装板7上且工业相机8的后侧面固定设置在相机安装角件9上,图像采集装置安装支承22的底端通过脚蹄安装板Ⅲ32设置有脚蹄Ⅲ31;
所述下茧抓取装置还包括直线模组Ⅰ11、直线模组Ⅱ16、直线模组Ⅲ18、支撑梁13、吸盘安装板支承14和下茧抓取装置支承21,直线模组Ⅰ11和直线模组Ⅲ18水平且平行设置在下茧抓取装置支承21顶端,直线模组Ⅰ11和直线模组Ⅲ18均与传送带6的传送方向垂直,支撑梁13的两端分别滑设在直线模组Ⅰ11和直线模组Ⅲ18的顶端,直线模组Ⅱ16竖直设置在支撑梁13的中部,吸盘10设置在吸盘安装板12的底端,吸盘安装板12通过支撑梁17设置在直线模组Ⅱ16的底端,储料斗Ⅰ20设置在下茧抓取装置支承21的中部且储料斗Ⅰ20位于传送带6的一侧,储料斗Ⅰ20和传送带6均位于直线模组Ⅰ11和直线模组Ⅲ18的正下方;
优选的,直线模组Ⅰ11、直线模组Ⅱ16、直线模组Ⅲ18均与控制器25连接;直线模组Ⅰ11可选用深圳市威远精密技术有限公司的MDL80铝基系列直线模组,其规格型号为:MDL80-ML1-1600-100BH-E-G-W,直线模组Ⅱ16可选用深圳市威远精密技术有限公司的MSX45铝基系列直线模组,其规格型号为:MDL80-ML1-1600-100BH-E-G-W,直线模组Ⅲ18选用深圳市威远精密技术有限公司的MDL80铝基系列直线模组,规格型号为:MDL80-MR1-1600-100BH-E-G-W;
进一步的,所述下茧抓取装置支承21的底端通过脚蹄安装板ⅠV35设置有脚蹄ⅠV34,吸盘10通过吸盘安装板12设置在吸盘安装板支承14的底端,直线模组Ⅱ16通过直线模组安装角件15设置在支撑梁13的中部;
优选的,传送带6为柔性传送带,传送带6上均匀设置有若干个凹槽,凹槽的尺寸与蚕茧结构匹配,每个凹槽放置一枚蚕茧,运输过程中蚕茧一直位于凹槽中,便于对运输过程中的蚕茧进行检测定位;吸盘10的内壁固定设置有海绵层,海绵层可避免抓取下茧时将蚕茧压坏;
进一步的,所述上车茧储存装置还包括储料斗安装支承19,储料斗Ⅱ36固定设置在储料斗安装支承19的顶端,储料斗安装支承19的底端通过脚蹄安装板V设置有脚蹄V。
基于蚕茧分选机的蚕茧分选方法,具体步骤如下:
1)蚕茧经上料机构送料自动落在传送带上,并单层铺设在传送带传送;
2)蚕茧到达图像采集装置的下方时,传送带停止传送,工业相机进行蚕茧的图像采集,将图像数据传输给控制器,控制器检测出下茧的中心点坐标;
3)控制器输出下茧的中心点坐标并判断出中心点坐标对应的吸盘位置;
4)当蚕茧输送到抓取装置下方时,传送带停止传送,吸盘移动至下茧的中心点正上方,吸盘吸住下茧,进行抓取;
5)下茧抓取后,吸盘移动至储料斗Ⅰ正上方,吸盘解吸,下茧掉落在储料斗Ⅰ中,实现下茧的收集储存;
6)未抓取的蚕茧为上茧,继续经传送带传送,上茧到达传送带末端,掉落至上车茧的收集储存装置中。
本发明的有益效果:
(1)本发明通过对YOLOv3深度学习目标检测算法进行基于锚点框参数预置、通道剪枝和嵌入感受野模块改进后以在蚕茧生产加工过程中选茧时对下茧进行实时检测;蚕茧分选机根据下茧实时检测方法输出的坐标对下茧进行抓取剔除,对上车茧收集储存,从而提高了蚕茧生产加工的生产效率及茧丝质量,降低生产成本;
(2)本发明蚕茧分选机具有结构简单、分选质量精准、工作效率高等特点。
附图说明
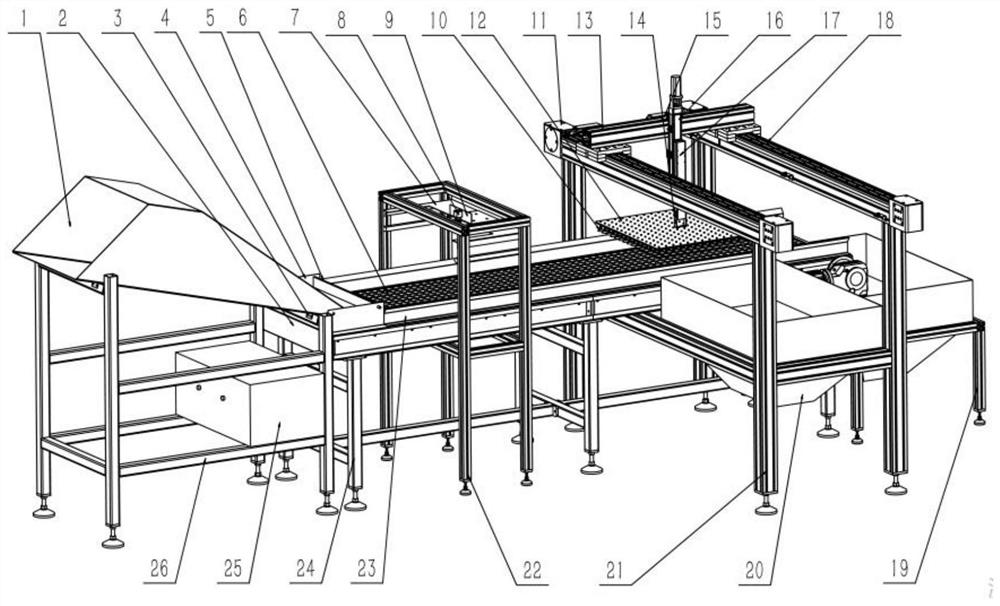
图1为蚕茧分选机结构示意图;
图2为上料装置结构示意图;
图3为输送装置结构示意图;
图4为图像采集装置结构示意图;
图5为下茧抓取装置结构示意图;
图6为上车茧储存装置结构示意图;
图7为下茧抓取原理图;
图8为下茧实时检测方法流程图
图9下茧检测数据集中目标统计结果图
图10通道剪枝示意图
图11改进的YOLOv3模型结构示意图
图中:1-输料斗、2-前挡板、3-输料斗安装角尖、4-毛刷安装板、5-毛刷、6-柔性凹槽传送带、7-相机安装板、8-工业相机、9-相机安装角件、10-吸盘、11-直线模组Ⅰ、12-吸盘安装板、13-支撑梁、14-吸盘安装板支承、15-直线模组安装角件、16-直线模组Ⅱ、17-连接梁、18-直线模组Ⅲ、19-储料斗安装支承、20-储料斗Ⅰ、21-下茧抓取装置支承、22-图像采集装置安装支承、23-挡板、24-输送装置机架、25-控制器、26-输料斗安装支承、27-脚蹄Ⅰ、28-脚蹄安装板Ⅰ、29-传送带导轨、30-电机、31-脚蹄Ⅲ、32-脚蹄安装板Ⅲ、33-LED光源、34-脚蹄IV、35-脚蹄安装板IV、36-储料斗Ⅱ。
具体实施方式
下面结合具体实施方式,对本发明作进一步说明。
实施例1:一种蚕茧下茧实时检测方法(见图8),具体步骤如下:
1)以薄皮茧、瘪茧、特小茧、黄斑茧为检测目标,对检测目标进行不同位置和不同角度进行拍摄,采集下茧检测数据集;
2)利用插值算法将下茧检测数据集变换成416×416的图像,并将图像划分为训练集和测试集;其中训练集与测试集的图像数量比为3:1;
3)利用labelⅠmg标注工具对训练集和测试集中的图像进行标注;所述标注为对每幅图像上所有识别的物体标出相对应的下茧类别的边界框;
4)以YOLOv3模型为基础模型,利用训练集中标注的图像对模型进行训练,进行超参数搜索与进化得到进化新一代,并通过适应度函数判断是否进化,进化搜索选择适合下茧检测数据集的超参数;
5)设置改进YOLOv3模型的进化超参数,将预训练权载入改进YOLOv3模型中进行训练,得到最优训练权重;
其中改进YOLOv3模型为
a.通过对YOLOv3模型的锚点框尺寸和数量进行K-means聚类分析来选择适用于下茧检测数据集的锚点框参数;
b.采用通道稀疏化后基于批量正则化层(BN)缩放因子的模型剪枝方法对YOLOv3模型进行压缩;
c.将感受野模块RFB嵌入YOLOv3模型中以增加模型的局部感受野;
采用通道稀疏化后基于批量正则化层(BN)缩放因子的模型剪枝方法对YOLOv3模型进行压缩的具体方法为
对YOLOv3模型中BN层的每一个通道均引入缩放因子γ进行L1正则化,若缩放因子γ在L1正则化的约束下趋近于0,则此通道在模型中对特征图预测的贡献程度低,进行剪枝;其中,缩放因子γ为需要训练的参数,取值为0<γ;
6)将最优训练权重载入改进YOLOv3模型中对测试集中的图像进行测试;
7)重复步骤5)和6)得到最优YOLOv3模型作为下茧实时检测方法。
实施例2:如图1所示,一种蚕茧下茧实时检测方法采用的蚕茧分选机,包括依次连接的上料装置、输送装置、图像采集装置、下茧抓取装置和上车茧储存装置,
上料装置用于蚕茧上料;
输送装置用于输送蚕茧;
图像采集装置用于对输送装置上的蚕茧进行拍照,获取蚕茧图像;
下茧抓取装置用于对蚕茧进行抓取剔除;
下茧抓取装置用于对下茧进行储存;
上车茧储存装置用于对上车茧进行储存;
上料装置包括输料斗1,输料斗1设置在输送装置的进料端;输送装置包括传送带6、输送装置机架24和电机30,传送带6设置在输送装置机架24顶端,电机30设置在输送装置机架24的顶部侧端,电机30的输出轴与传送带6传动连接;图像采集装置包括工业相机8,工业相机8设置在输送装置中部的正上方;下茧抓取装置包括若干个吸盘10,吸盘10设置在输送装置末端的上方;下茧抓取装置包括储料斗Ⅰ20,储料斗Ⅰ20设置在传送带6的侧端,蚕茧储存时,储料斗Ⅰ20位于吸盘10的正下方;上车茧储存装置设置在传送带6的末端正下方;
上车茧储存装置为储料斗Ⅱ36;
传送带6的初始端包覆设置在从动转轴上,传送带6的末端包覆设置在主动转轴上,从动转轴和主动转轴平行设置,电机30的输出轴与主动转轴的端头连接;
蚕茧分选机还包括控制器25,输送装置、图像采集装置、下茧抓取装置均与控制器25连接;电机30、工业相机8和吸盘10均与控制器25连接;
基于蚕茧分选机的蚕茧分选方法,具体操作步骤如下:
1)蚕茧经上料机构送料自动落在传送带上,并单层铺设在传送带传送;
2)蚕茧到达图像采集装置的下方时,传送带停止传送,工业相机进行蚕茧的图像采集,将图像数据传输给控制器,控制器检测出下茧的中心点坐标;
3)控制器输出下茧的中心点坐标并判断出中心点坐标对应的吸盘位置;
4)当蚕茧输送到抓取装置下方时,传送带停止传送,吸盘移动至下茧的中心点正上方,吸盘吸住下茧,进行抓取;
5)下茧抓取后,吸盘移动至储料斗Ⅰ正上方,吸盘解吸,下茧掉落在储料斗Ⅰ中,实现下茧的收集储存;
6)未抓取的蚕茧为上茧,继续经传送带传送,上茧到达传送带末端,掉落至上车茧的收集储存装置中。
实施例3:本实施例蚕茧分选机与实施例1的蚕茧分选机基本相同,不同之处在于:如图2所示,上料装置还包括输料斗安装支承26,输料斗1固定设置在输料斗安装支承26的顶端;
上上料装置还包括输料斗安装角件3、脚蹄Ⅰ27和脚蹄安装板Ⅰ28,输料斗1的输出端通过输料斗安装角件3固定设置在输送装置的进料端,输料斗安装支承26的底端通过脚蹄安装板Ⅰ28设置有脚蹄Ⅰ27。
实施例4:本实施例蚕茧分选机与实施例1或2的蚕茧分选机基本相同,不同之处在于:如图3所示,输送装置还包括传送带导轨29、前挡板2、毛刷5和挡板23,传送带导轨29固定设置在输送装置机架24顶端,挡板23垂直设置在传送带导轨29上且挡板23位于传送带6的两侧,前挡板2固定设置在传送带导轨29的初始端,毛刷5固定设置在输送装置机架24顶端且毛刷5位于输送装置的进料端;传送带10的两侧滑设在传送带导轨29内;
从动转轴和主动转轴分别设置在输送装置机架24的两端,从动转轴和主动转轴可在输送装置机架24的两端转动;
前挡板2可防止上料装置上料后蚕茧掉落,挡板23可避免蚕茧传输过程中掉落,毛刷5可将输送带上的蚕茧刷平,保证蚕茧不堆叠起来,保证每一次向前输送一层蚕茧;
输送装置还包括脚蹄Ⅱ和脚蹄安装板Ⅱ,输送装置机架24的底端通过脚蹄安装板Ⅱ设置有脚蹄Ⅱ,毛刷5通过毛刷安装板4固定设置在输送装置机架24顶端。
实施例5:本实施例蚕茧分选机与实施例1、2或3的蚕茧分选机基本相同,不同之处在于:如图4所示,图像采集装置还包括图像采集装置安装支承22和LED光源33,工业相机8固定设置在图像采集装置安装支承22顶端中心,LED光源33固定设置在图像采集装置安装支承22顶端且LED光源33位于工业相机8的两侧;
LED光源33与控制器25连接;LED光源用于提供稳定的光照条件;
图像采集装置还包括相机安装板7、和相机安装角件9,相机安装板7水平设置在图像采集装置安装支承22的顶端,相机安装角件9竖直设置在相机安装板7的顶端中心,工业相机8的底端固定设置在相机安装板7上且工业相机8的后侧面固定设置在相机安装角件9上,图像采集装置安装支承22的底端通过脚蹄安装板Ⅲ32设置有脚蹄Ⅲ31。
实施例6:本实施例蚕茧分选机与实施例1、2、3或4的蚕茧分选机基本相同,不同之处在于:如图5所示,下茧抓取装置还包括直线模组Ⅰ11、直线模组Ⅱ16、直线模组Ⅲ18、支撑梁13、吸盘安装板支承14和下茧抓取装置支承21,直线模组Ⅰ11和直线模组Ⅲ18水平且平行设置在下茧抓取装置支承21顶端,直线模组Ⅰ11和直线模组Ⅲ18均与传送带6的传送方向垂直,支撑梁13的两端分别滑设在直线模组Ⅰ11和直线模组Ⅲ18的顶端,直线模组Ⅱ16竖直设置在支撑梁13的中部,吸盘10通过吸盘安装板支承14设置在直线模组Ⅱ16的底端,储料斗Ⅰ20设置在下茧抓取装置支承21的中部且储料斗Ⅰ20位于传送带6的一侧,储料斗Ⅰ20和传送带6均位于直线模组Ⅰ11和直线模组Ⅲ18的正下方;
优选的,直线模组Ⅰ11、直线模组Ⅱ16、直线模组Ⅲ18均与控制器25连接;直线模组Ⅰ11选用深圳市威远精密技术有限公司的MDL80铝基系列直线模组规格为:MDL80-ML1-1600-100BH-E-G-W、直线模组Ⅱ16选用深圳市威远精密技术有限公司的MSX45铝基系列直线模组规格为:MDL80-ML1-1600-100BH-E-G-W、直线模组Ⅲ18选用深圳市威远精密技术有限公司的MDL80铝基系列直线模组规格为:MDL80-MR1-1600-100BH-E-G-W;
下茧抓取装置支承21的底端通过脚蹄安装板ⅠV35设置有脚蹄ⅠV34,吸盘10通过吸盘安装板12设置在吸盘安装板支承14的底端,直线模组Ⅱ16通过直线模组安装角件15设置在支撑梁13的中部;
传送带6为柔性传送带,传送带6上均匀设置有若干个凹槽,凹槽的尺寸与蚕茧结构匹配,每个凹槽放置一枚蚕茧,运输过程中蚕茧一直位于凹槽中,便于对运输过程中的蚕茧进行检测定位;吸盘10的内壁固定设置有海绵层,海绵层可避免抓取下茧时将蚕茧压坏;
下茧抓取原理图见图7,蚕茧在输送过程中位于传送带的凹槽中,图像采集装置获取到的图像中的每个凹槽都有固定的像素坐标范围,在下茧抓取装置工作时,每个吸盘的位置Nij与相应的像素坐标范围的凹槽位置Mij匹配;根据控制器输出检测到的下茧中心点坐标可以判断出下茧所在凹槽的位置Mij,当该幅图像中的所有蚕茧输送到抓取装置中时,控制器控制对应Nij位置的吸盘工作,相应的下茧就被抓取起来;当一幅图像中有多个下茧时,就控制多个对应的吸盘工作;
基于蚕茧分选机的蚕茧分选方法,具体步骤如下:
1)蚕茧经上料机构送料自动落在传送带上,并单层铺设在传送带传送;
2)蚕茧到达图像采集装置的下方时,传送带停止传送,工业相机进行蚕茧的图像采集,将图像数据传输给控制器,控制器检测出下茧的中心点坐标;
3)控制器输出下茧的中心点坐标并判断出中心点坐标对应的吸盘位置;
4)当蚕茧输送到抓取装置下方时,传送带停止传送,直线模组Ⅰ和直线模组Ⅲ带动吸盘移动至传送带正上方,并使预设吸盘移动至下茧的中心点正上方,直线模组Ⅱ带动吸盘向接近传送带的方向运动,到达预设位置后,吸盘吸住下茧,进行抓取;
5)下茧抓取后,直线模组Ⅱ带动吸盘向远离传送带的方向运动,到达预设位置后,直线模组Ⅰ和直线模组Ⅲ带动吸盘移动至储料斗Ⅰ正上方即吸盘移动至储料斗Ⅰ正上方,吸盘解吸,下茧掉落在储料斗Ⅰ中,实现下茧的收集储存;
6)未抓取的蚕茧为上茧,继续经传送带传送,上茧到达传送带末端,掉落至上车茧的收集储存装置中。
实施例6:本实施例蚕茧分选机与实施例1、2、3、4或5的蚕茧分选机基本相同,不同之处在于:如图6所示,上车茧储存装置还包括储料斗安装支承19,储料斗Ⅱ36固定设置在储料斗安装支承19的顶端,储料斗安装支承19的底端通过脚蹄安装板V设置有脚蹄V。
实施例8:本实施例蚕茧下茧实时检测方法与实施例1的蚕茧下茧实时检测方法一致,其下茧检测数据集共采集到图像550幅,训练集412幅,验证集138幅。不同类别的目标在数据集中数量如图9所示,分别包含薄皮茧399个,瘪茧415个,特小茧387个和黄斑茧430个,每一类别都包含400个左右能很好的保证目标的均衡性;
改进YOLOv3模型为通过对锚点框尺寸和数量进行K-means聚类分析实验来选择适用于下茧检测数据集的锚点框参数,从而提高模型的检测精度和加快收敛速度;不同数量锚点框效果见表1,从表1可知,在保证模型大小剧本不变的前提下,当锚点框数量为3时,平均检测速度相对于其他数量的锚点框来说是最快的,达到了31.14帧/s,而mAP是最高的,达到了96.10%。说明当锚点框数量为3时,对于下茧检测数据集来说检测效果比较好。故通过实验选择的锚点框数量为3,锚点框尺寸分别为(30,28)、(31,35)、(31,41),每个YOLO层分配有1个锚点框对目标进行预测。
表1不同数量锚点框效果
改进YOLOv3模型对YOLOv3中BN层每一个通道都引入一个缩放因子γ进行L1正则化,如果缩放因子γ在L1正则化的约束下趋近于0,则此通道在模型中对特征图预测的贡献程度就比较低,可以进行剪枝;即采用通道稀疏化后基于批量正则化层(BN)缩放因子的模型剪枝方法对模型进行压缩;通道剪枝示意见图9,左侧为模型原始结构,右侧为通道剪枝后的模型结构,每个平行四边形表示一个卷积通道,在稀疏化训练后的浅色部分的权重比较小,因此需要将浅色部分对应的通道进行删除,从而得到参数量较少的模型,通道剪枝的实现流程如下:
1)用下茧检测数据集训练YOLOv3模型,得到基础模型;
2)对基础模型进行稀疏化训练,使得特征图经过BN层后对于下茧预测贡献程度较低的通道对应的缩放因子γ尽量趋近于0;
3)确定剪枝比例,将低于剪枝比例设定阈值的缩放因子对应的通道删除;
4)对剪枝后的模型进行精度微调,减小精度损失;
5)生成新的下茧检测模型文件;
将稀疏化训练好后的模型进行基于BN层缩放因子γ的模型剪枝,不同剪枝率模型效果见表2;从表2可知,采用不同剪枝率进行剪枝可以不断降低模型大小,虽然随着剪枝率的加大模型的mAP也在减小,但是总体来说减小的值非常小,可以忽略不计,而平均检测速度一直提升;最终,可以减掉模型中卷积层80%的通道数,模型的大小减少至46.90M,平均检测速度从剪枝前的31.14帧/s提升到剪枝后的51.05帧/s,并且mAP只下降0.04%;
表2不同剪枝率模型效果
由于改进的YOLOv3模型根据检测对象是下茧,在检测时属于小目标,随着模型加深,特征图的位置信息会部分丢失。将感受野模块(RFB)模块嵌入到了YOLOv3中,来增加模型的局部感受野,使输出的特征图的具有更加丰富的上下文信息;
如图11所示,为保证模型的3个YOLO层分支都能得到RFB模块带来感受野增强的效果,故将RFB模块嵌入在3个YOLO层分支的起始效果最好,虚线框里的即为新增的RFB模块;表3为嵌入RFB后模型效果。
表3嵌入RFB后模型效果
从表3可知,在保证模型的大小为46.90M不变的前提下,分别在模型的不同位置添加RFB模块后,模型的平均检测速度均为50帧/s左右,较80.00%剪枝率剪枝后的模型平均检测速度减小很少,其中在模型的36层后,即3个YOLO层分支的开始添加RFB模块相对于其他嵌入方式来说,mAP最高的,提升接近1.00%,达到96.80%。故选取在36层后添加RFB模块的模型为最佳检测模型。
上面结合附图对本发明的具体实施例作了详细说明,但是本发明并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
- 一种蚕茧下茧实时检测方法
- 一种大气环境下空气中氯离子沉积率实时在线检测方法