基于斜率约束和回溯搜索的水下多目标跟踪方法
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及多目标被动跟踪和策略优化领域,涉及一种基于斜率约束和回溯搜索的多目标跟踪方法。
背景技术
水下多目标的检测和被动跟踪相对于主动跟踪具有非线性、轨迹易中断、干扰目标较多等特点。在跟踪过程中,由于杂波、多途干扰、信噪比低、目标多等原因,要实现水下被动多目标的检测和跟踪是一个具有挑战的任务。
在水下被动目标检测和跟踪任务中,一般通过宽带能量检测得到目标方位的谱数据,并以时间方位历程图(Bearing-Time Recording,BTR)形式进行显示,再基于BTR图进行目标跟踪的研究。在目标检测的任务中,基本的检测原理是引入隐马尔可夫模型(HiddenMarkov Model,HMM),把频率、频率变化率、方位及方位变化率作为HMM的状态,实现基于线谱的自动检测;在被动目标跟踪任务中,通常使用数据关联算法来实现被动跟踪。但在处理多目标交叉问题时,关联正确率很低。因此,水下的被动多目标跟踪仍具有以下几个问题:1)由于水下弱目标多、杂波干扰等原因,很难实现多目标的检测;2)在BTR图中为信号能量较弱的条件下,容易出现航迹中断和消失的现象,很难实现多目标的实时跟踪;3)传统数据关联的算法不能有效解决航迹交叉的问题。因此,在水下环境下,提高多目标跟踪系统性能具有重要的意义。
发明内容
本发明面向水下多目标跟踪的技术需求,为解决杂波干扰和弱信号条件下目标航迹中断和交叉等问题,提高水下多目标跟踪系统的精度,提出了一种基于斜率约束和回溯搜索的水下多目标跟踪方法,可用于水下多杂波干扰、弱信号、低信噪比等环境,有效提高目标跟踪的实时性和精度。本发明方法将目被动跟踪方法和策略优化机制结合,引入斜率约束和回溯搜索两种策略分别用于水下多目标的跟踪和目标航迹交叉和中断的补偿,从而提高目标跟踪的精度。
为了达到上述目的,本发明提供如下技术方案:
基于斜率约束和回溯搜索的水下多目标跟踪方法,包括如下步骤:
(1)初始化INS/CNS水下被动多目标检测跟踪系统,记录目标方位测量数据,依据水下目标运动学分析和利用门限阈值的方法检测出水下的多目标;
(2)在传统多假设跟踪算法框架下,设计一种基于斜率约束和共用量测的假设生成规则。当航迹正常跟踪时,使用斜率拟合约束的方式进行跟踪,通过比较候选目标点斜率与当前目标航迹的拟合斜率的差的阈值来判断是否可以与当前目标关联。如果所有候选目标点都不符合阈值设定则认为是中断,触发中断补偿策略(3);
(3)当航迹中断时,通过回溯搜索的方法确定中断起始航迹点,利用容积卡尔曼滤波对中断航迹预测和补偿,同时对假设生成结果剪枝,解决目标航迹中断错连的问题。
进一步的,所述步骤(1)具体包括如下过程:
假设在二维监测区域内有多个目标,采用匀速运动模型模拟每个目标的位置变化情况,假定一个目标在k时刻的状态矢量表示为可表示为x
x
x
其中,
F表示目标的状态转移矩阵,G为状态噪声强度的输入矩阵。通常假设过程噪声w
假设跟踪目标和探测传感器位于同一个平面内,确定被动探测传感器的个数和位置后,即可得到某一目标x
其中,β
进一步的,所述步骤(2)具体包括如下过程:
共用量测策略:假设在t时刻,目标的总个数为M,待关联目标的状态矩阵为X=[x
其中g
其中,z
对于改进的MHT算法的约束条件为:
其中u
斜率约束策略:当航迹正常跟踪时,通过斜率拟合约束的方式进行跟踪。具体来说,通过比较候选目标点斜率与当前目标航迹的拟合斜率的差的阈值来判断是否可以与当前目标关联。因此,记当前候选目标点的斜率k和当前目标航迹拟合的斜率k
进一步的,所述步骤(3)具体包括如下过程:
利用时间方位历程图对航迹目标进行跟踪时,经常会因为目标本身的轨迹交叉和信号的丢帧,导致目标轨迹在关联之后出现断裂,这时候关联算法将无法工作。因此,需要对断裂轨迹进行预测。在容积卡尔曼滤波(Cubature Kalman filter,CKF)中,设置滤波器的初始状态量和协方差x
(1)时间更新部分:
式中,chol(·)表示Cholesky分解;P
(2)计算状态量的估计值
(3)量测更新
求解预测协方差矩阵和计算容积点x
计算传播容积点z
z
(4)计算到量测量的估计值之后,可以计算相关协方差:
与现有技术相比,本发明具有如下优点和有益效果:
1.本发明基于传统多假设跟踪模型,提出一种基于斜率约束和回溯搜索的多目标跟踪算法,该算法可以有效解决水下弱目标、杂波干扰环境下航迹交叉和中断的问题,有助于提交水下多目标被动跟踪的实时性和精度。
2.本发明优化了MHT算法的假设生成策略,提出了共用量测的方法实现目标航迹的连续跟踪。客服了传统MHT算法容易出现航迹跟踪中断的问题。将斜率约束和回溯搜索两种策略相结合,当航迹正常跟踪时,通过斜率拟合约束的方式进行跟踪。具体来说,通过比较候选目标点斜率与当前目标航迹的拟合斜率的差的阈值来判断是否可以与当前目标关联。
当航迹中断时,通过回溯搜索的方法确定中断起始航迹点,利用容积卡尔曼滤波对中断航迹预测和补偿,同时对假设生成结果剪枝,解决目标航迹中断错连的问题。
3.与传统假设跟踪方法相比,本发明提出的基于斜率约束和回溯搜索的方法结合了假设跟踪模型和优化策略。本发明在长航水下环境下,能够提高目标跟踪的精度,保证跟踪的实时性。
附图说明
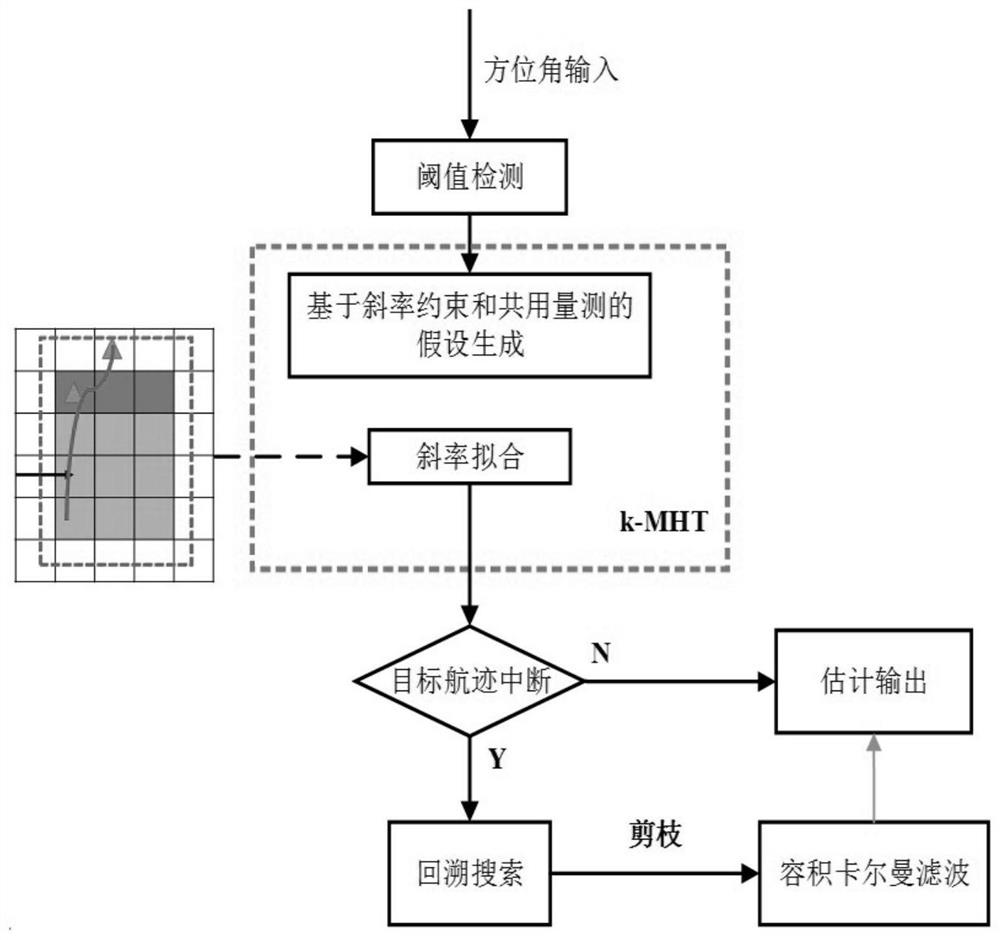
图1为本发明的方法流程图。
图2中(a)和(b)分别表示复杂环境下多目标的时间方位历程图和目标检测图。
图3中(a)和(b)分别表示阈值t=0.1和t=0.025下多目标跟踪结果。
具体实施方式
以下将结合附图和具体实施例对本发明提供的技术方案进行详细说明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。
在k-MHT算法中,我们使用斜率约束和共用量测的策略作为假设生成的条件。保持在每个时刻的跟踪后拟合当前目标的斜率,通过比较当前斜率和历史拟合的斜率的差来判断是否出现航迹中断。如果出现航迹中断,就触发回溯搜索,回溯到航迹中断的起始时刻点,对误检测目标不继续跟踪,从而达到剪枝的目的,并利用容积卡尔曼滤波进行航迹预测,最终避免航迹点的错连。
具体的说,如图1所示,本发明提供的基于残差补偿多速率容积卡尔曼滤波的INS/CNS组合导航方法包括如下步骤:
步骤(1):假设在二维监测区域内有多个目标,采用匀速运动模型模拟每个目标的位置变化情况,假定一个目标在k时刻的状态矢量表示为可表示为x
x
其中,
F表示目标的状态转移矩阵,G为状态噪声强度的输入矩阵。通常假设过程噪声w
假设跟踪目标和探测传感器位于同一个平面内,确定被动1探测传感器的个数和位置后,即可得到某一目标x
其中,β
步骤(2)共用量测策略:假设在t时刻,目标的总个数为M,待关联目标的状态矩阵为X=[x
其中g
其中,z
对于改进的MHT算法的约束条件为:
其中u
斜率约束策略:当航迹正常跟踪时,通过斜率拟合约束的方式进行跟踪。具体来说,通过比较候选目标点斜率与当前目标航迹的拟合斜率的差的阈值来判断是否可以与当前目标关联。因此,记当前候选目标点的斜率k和当前目标航迹拟合的斜率k
步骤(3):在容积卡尔曼滤波(Cubature Kalman filter,CKF)中,设置滤波器的初始状态量和协方差x
(1)时间更新部分:
式中,chol(·)表示Cholesky分解;P
(2)计算状态量的估计值
(3)量测更新
求解预测协方差矩阵和计算容积点x
计算传播容积点z
z
(4)计算到量测量的估计值之后,可以计算相关协方差:
根据本发明的一个实测数据实例,图2(a)(b)分别表示复杂环境下多目标的时间方位历程图和目标检测图。图3(a)和(b)分别表示阈值t=0.1和t=0.025下多目标跟踪结果。从跟踪结果中可以看出:整体上看,当出现航迹交叉的情况时,k-MHT算法可以充分利用共用量测的假设生成策略,在跟踪过程中共用量测,同时更新航迹。首先,当门限阈值变小,会有更多目标的航迹被起批和跟踪关联(见图3(b)圆圈标注处),且在图3(a)中对于在检测图中信号较强的目标,在跟踪结果图中都被正确起批,在回波干扰的影响下也都没有发生关联跟踪错误。
在出现航迹中断,如图3(a)中圆圈标注处所示,对比检测结果,此处出现了航迹的中断,但在跟踪过程中,k-MHT算法对目标会继续保持量测一致进行跟踪,但因为一直保持量测更新导致目标航迹斜率不符合和其本身的运动轨迹,会触发回溯搜索,进行假设剪枝,即不继续跟踪误检的虚假目标,然后利用容积卡尔曼滤波进行航迹预测,将断裂航迹补偿。
本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
- 基于斜率约束和回溯搜索的水下多目标跟踪方法
- 基于相关性聚类和时空约束的行人多目标跟踪方法