一种船舶表面智能视觉自检无人车喷漆系统
文献发布时间:2023-06-19 12:21:13
技术领域
本发明涉及船舶设备技术领域,特别是涉及一种船舶表面智能视觉自检无人车喷漆系统。
背景技术
目前现有的船舶表面涂装与喷漆,基本采用人工肉眼检查,人工通过工作梯、高空车或者脚手架完成工作。因此不仅不利于相关检测数据准确实时传输,而且长时间的劳动会造成人员疲劳降低涂装与喷漆的速度。同时在涂装与喷漆时如果遇到复杂目标,工作人员无法实时比对数据进行缺陷判断。对于肉眼无法观察到的细微裂纹,工作人员也无法及时发现。如果遇到复杂或者突发情况,也需要大量时间联系后台工程师判断和处理,工作效率低下。因此目前需要一种船舶表面智能视觉自检无人车喷漆系统用以解决上述问题。
发明内容
本发明的目的是克服了现有技术的问题,提供了一种船舶表面智能视觉自检无人车喷漆系统。
为了达到上述目的,本发明采用以下方案:
一种船舶表面智能视觉自检无人车喷漆系统,包括喷漆无人车和远程监管系统,远程监管系统通过无线通信模块与无喷漆无人车的检测模块连接,远程监管系统可通过无线通信模块设定喷漆无人车的喷漆厚度;
喷漆无人车包括:
喷漆装置,喷漆无人车可通过喷漆装置对船舶表面喷漆;
漆层检测模块,喷漆无人车可通过漆层检测模块对船舶表面漆层厚度和船体裂纹的长度和深度进行检测;
对比控制模块,对比控制模块与漆层检测模块连接,对比控制模块可通过控制喷漆无人车的移动速度和喷漆装置的喷漆速度调节喷漆厚度;
视觉记录模块,视觉记录模块通过无线通信模块与远程监管系统连接,远程监管系统可通过视觉记录模块记录船舶表面喷漆前后的图像信息。
进一步的,远程监管系统包括三菱MELSEC iQ-R系列自动化控制器。
进一步的,远程监管系统包括西门子SIMATIC ODK 1500S软控制器。
进一步的,漆层检测模块包括Omron FH系列AI自动执行划痕和缺陷检测OmronFHV7、数字放大器分离式超声波传感器E4C-UDA和小型超声波传感器E4E2。
进一步的,漆层检测模块包括Omron2D CMOS激光型ZS-L。
进一步的,无线通信模块为ZigBee无线通信模块,ZigBee无线通信模组芯片型号为DRF1601。
进一步的,视觉记录模块为Omron PC视觉模块FJ。
进一步的,喷漆无人车还设有动态检测单元为 STMICROELECTRONICS LSM9DS0TR传感器。
进一步的,远程监管系统包括提醒报警模块,漆层检测模块确认裂缝的长度和深度达到阈值后通过无线通信模块向远程监管系统发送报警指令,远程监管系统通过提醒报警模块向工作人员发出提醒报警信号。
一种船舶表面智能视觉自检无人车喷漆方法,包括以下步骤:
S01启动权利要求1中的一种船舶表面智能视觉自检无人车喷漆系统;
S02通过漆层检测模块对船舶表面漆层厚度和船体裂纹的长度和深度进行检测,如裂纹的长度和深度达到阈值漆层检测模块通过无线通信模块向远程监管系统发送报警指令;
S03对比控制模块将漆层检测模块所测的漆层厚度数值与远程监管系统设定的漆层厚度数值对比后设定喷漆无人车的移动速度和喷漆装置的喷漆速度;
S04喷漆达到远程监管系统设定的漆层厚度数值后,视觉记录模块通过无线通信模块将喷漆前后的图像数据发送至远程监管系统;
S05对比控制模块对比数据判断喷漆装置和无人车本体参数是否正常。
与现有的技术相比,本发明具有如下优点:一、通过该无人车喷漆系统对船舶自动喷漆,相对人工除锈可以大大提高船舶表面喷漆的效率。二、该系统通过无线通讯模块可实时保证数据传输准确性。三、无人车的对比控制模块可智能检查比对数据判断缺陷情况,后台人员响应机制同步进行,大大提高了工作效率和作业质量。四、有利于随时查阅后台传输保存数据库信息。
附图说明
下面结合附图和具体实施方式对本申请作进一步详细的说明。
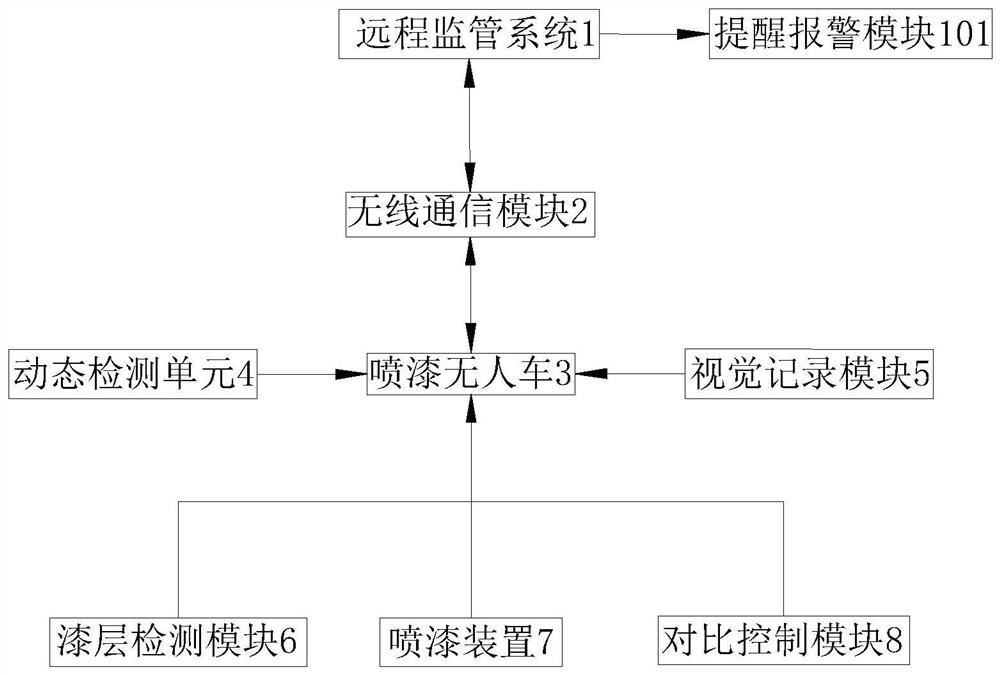
图1是本发明的一种船舶表面智能视觉自检无人车喷漆系统的整体结构示意图。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
如图1所示,一种船舶表面智能视觉自检无人车喷漆系统,包括喷漆无人车3和远程监管系统1,远程监管系统1通过无线通信模块2与无喷漆无人车3的检测模块连接,远程监管系统1可通过无线通信模块2设定喷漆无人车3的喷漆厚度。
喷漆无人车3包括:
喷漆装置7,喷漆无人车3可通过喷漆装置7对船舶表面喷漆。
漆层检测模块6,喷漆无人车3可通过漆层检测模块6对船舶表面漆层厚度和船体裂纹的长度和深度进行检测。如裂纹的长度和深度达到阈值漆层检测模块6通过无线通信模块2向远程监管系统1发送报警指令。
对比控制模块8,对比控制模块8与漆层检测模块6连接,对比控制模块8可通过控制喷漆无人车3的移动速度和喷漆装置7的喷漆速度调节喷漆厚度。同时喷漆无人车3的对比控制模块8可智能检查比对数据判断缺陷情况,后台人员响应机制同步进行,大大提高了工作效率和作业质量。
视觉记录模块5,视觉记录模块5通过无线通信模块2与远程监管系统1连接,远程监管系统1可通过视觉记录模块5记录船舶表面喷漆前后的图像信息。
优选的,远程监管系统1包括三菱MELSEC iQ-R系列自动化控制器。三菱MELSECiQ-R系列自动化控制器的CPU包括各种嵌入功能,可执行各种控制任务,并内置USB端口和以太网端口。运动CPU实现了各种运动控制,如定位、速度、扭矩和高级同步等。基座单元可安装不同的模块,如电源、CPU和输入输出,支持不同尺寸的系统。高密度端点连接可节省控制柜内设计空间,进一步减少安装费用,兼有输入和输出模块功能的模块。
优选的,远程监管系统1包括西门子SIMATIC ODK 1500S软控制器。
优选的,漆层检测模块6包括Omron FH系列AI自动执行划痕和缺陷检测OmronFHV7、数字放大器分离式超声波传感器E4C-UDA和小型超声波传感器E4E2。
优选的,漆层检测模块6包括Omron2D CMOS激光型ZS-L。
优选的,无线通信模块2为ZigBee无线通信模块2,ZigBee无线通信模组芯片型号为DRF1601。ZigBee是一项新型的无线通信技术,适用于传输范围短数据传输速率低的一系列电子元器件设备之间。 ZigBee无线通信技术可于数以千计的微小传感器相互间,依托专门的无线电标准达成相互协调通信,因而该项技术常被称为HomeRFLite 无线技术、FireFly无线技术。优选的,在本实施例中采用的ZigBee 芯片为深圳鼎泰克DRF1601芯片,该芯片工作频率为2.4G,可用频段数为16个,无线速率为250Kbit/s,发射功率为4dBm,接收灵敏度为-96dBm,最大发射电流34mA,最大接收电流25mA,工作电压范围为5.0~12V,工作温度范围-40-80℃,可以将数据进行实时传输同时保证数据传输准确性。
优选的,视觉记录模块5为Omron PC视觉模块FJ。
优选的,喷漆无人车3还设有动态检测单元4为 STMICROELECTRONICS LSM9DS0TR传感器。
优选的,远程监管系统1包括提醒报警模块,漆层检测模块6确认裂缝的长度和深度达到阈值后通过无线通信模块2向远程监管系统1发送报警指令,远程监管系统1通过提醒报警模块向工作人员发出提醒报警信号。
一种船舶表面智能视觉自检无人车喷漆方法,包括以下步骤:
S01启动权利要求1中的一种船舶表面智能视觉自检无人车喷漆系统。
S02通过漆层检测模块6对船舶表面漆层厚度和船体裂纹的长度和深度进行检测,如裂纹的长度和深度达到阈值漆层检测模块6通过无线通信模块2向远程监管系统1发送报警指令。
S03对比控制模块8将漆层检测模块6所测的漆层厚度数值与远程监管系统1设定的漆层厚度数值对比后设定喷漆无人车3的移动速度和喷漆装置7的喷漆速度。
S04喷漆达到远程监管系统1设定的漆层厚度数值后,视觉记录模块5通过无线通信模块2将喷漆前后的图像数据发送至远程监管系统1。
S05对比控制模块8对比数据判断喷漆装置7和无人车本体参数是否正常。
与现有的技术相比,本发明具有如下优点:一、通过该无人车喷漆系统对船舶自动喷漆,相对人工除锈可以大大提高船舶表面喷漆的效率。二、该系统通过无线通信模块2可实时保证数据传输准确性。三、喷漆无人车3的对比控制模块8可智能检查比对数据判断缺陷情况,后台人员响应机制同步进行,大大提高了工作效率和作业质量。四、有利于随时查阅后台传输保存数据库信息。
以上所述仅是本申请的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本申请技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本申请的保护范围。
- 一种船舶表面智能视觉自检无人车喷漆系统
- 一种航空机库库房工具视觉自检智能维修服务选取系统