机器人模块化结构组件
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及机器人技术领域,尤其涉及机器人模块化结构组件。
背景技术
机器人已广泛用于生活或工业领域的商业用途上,作为执行系统具有很大的灵活性和弹性,可完成不同的工作任务,但现有的机器人往往针对特定的使用目的和场合,设计特定的结构,只有一种主要功能,缺乏功能的扩展性。即传统的机器人为一个机器人一套新结构,需要多种应用控制时,首先要开模开发多个机器人,开发成本高,集成应用效果差,机器人控制不灵活,机器人系统稳定性得不到保证。
针对上述问题,设计一种机器人模块化结构组件,降低新机器人的开模与开发成本,通过若干个模块化结构组件的组合,灵活性高,应用能力强,应用稳定。
发明内容
发明目的:本发明所要解决的当前机器人应用功能单一,开发成本高和控制应用不灵活的技术问题,本发明提供机器人模块化结构组件。
技术方案:机器人模块化结构组件,包括:结构支架,所述结构支架之间通过结构节点固定连接,所述结构支架的内侧固定有模块化主机箱,所述结构支架的外侧固定有结构外观件,所述结构支架的上端固定有人机交互屏系统。
优选的,所述结构支架包括若干通过结构节点固定连接的支杆,所述支杆为内部中空型,所述支杆上均匀设有若干镂空口。
优选的,所述镂空孔包括第一线口和支杆卡口,所述第一线口用于机器人电源线插入和引出,所述支杆卡口用于结构节点、模块化主机箱和结构外观件的卡接固定。
优选的,所述结构节点上设有节点卡口,所述节点卡口上设有节点卡扣机构,所述节点卡扣机构用于支杆的固定连接,所述节点卡口用于模块化主机箱和结构外观件的卡接固定。
优选的,所述节点卡口包括平面双向180°结构节点型、平面双向90°结构节点型、平面三向90°结构节点型、平面四向结构节点型、立面三向90°结构节点型、立面四向90°结构节点型和立面五向90°结构节点型。
优选的,所述节点卡扣机构包括设在节点卡口上的连动杆固定架,所述连动杆固定架内设有卡锁结构,所述卡锁结构上设有盖板,所述盖板通过固定螺丝固定在连动杆固定架上。
优选的,所述卡锁结构包括转动安装在连动杆固定架上的连动杆,所述连动杆向外连接有拉杆,所述连动杆向内连接有连接臂,所述连接臂向内连接有活动锁臂,所述活动锁臂上安装有锁头,所述锁头上固定有转动安装在杆固定架的活动轴。
优选的,所述结构外观件包括防护板,所述防护板的内侧固定有防护板卡扣,所述防护板卡扣固定在结构支架和结构节点上。
优选的,所述模块化主机箱包括箱体,所述箱体的外侧设有若干螺丝孔、箱体卡扣和箱体卡口,所述箱体安装有箱盖,所述箱盖通过箱盖卡扣和快开锁安装在箱体上。
优选的,所述箱体和箱盖分别设有第二线口。
有益效果
本发明的机器人模块化结构的组件的优点
1、结构紧凑,集中度高,模块化主机箱快速便捷的安装在结构支架上,根据实际控制需求快速调整机器人模块的数量,操作快捷,降低新机器人的开模与开发成本;
2、模块化主机箱外的结构外观件进行防水、防尘,防护稳固,美观性好;
3、机器人模块化结构组件拆卸便捷,根据需要快捷安装模块化主机箱,进行多功能控制,灵活性强,应用能力强,应用稳定。
附图说明
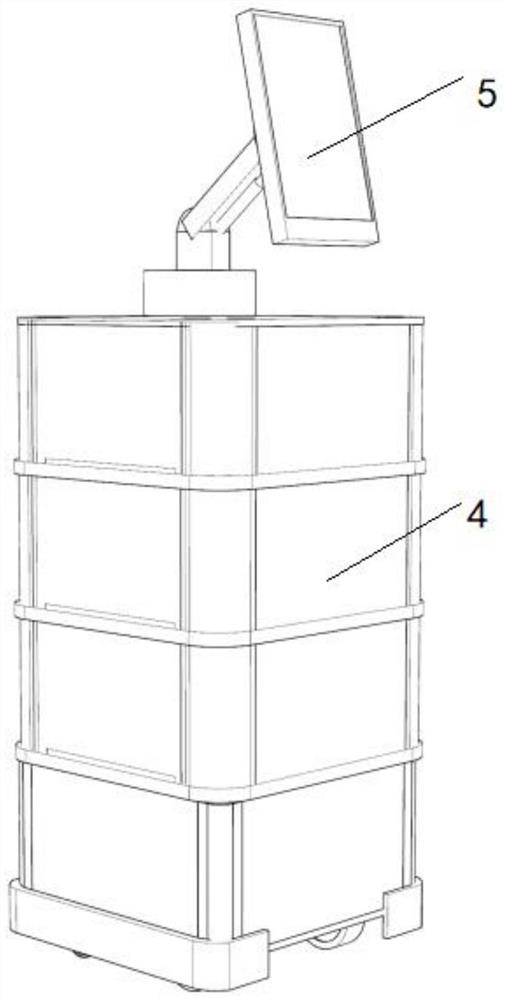
图1为本发明机器人模块化结构组件的结构示意图。
图2为本发明机器人模块化结构组件的拆分结构示意图。
图3为本发明机器人模块化结构组件的结构支架的结构示意图。
图4为本发明机器人模块化结构组件的支杆的结构示意图。
图5为本发明机器人模块化结构组件的多种类结构节点的结构示意图。
图6为本发明机器人模块化结构组件的平面双向180°结构节点型的节点卡口的结构示意图。
图7为本发明机器人模块化结构组件的卡锁结构的闭合状态的结构示意图。
图8为本发明机器人模块化结构组件的卡锁结构的开锁状态的结构示意图。
图9为本发明机器人模块化结构组件的结构外观件的结构示意图。
图10为本发明机器人模块化结构组件的模块化主机箱的结构示意图。
图11为本发明机器人模块化结构组件的模块化主机箱的拆分结构示意图。
具体实施方式
以下结合附图并通过具体实施例对本发明做进一步阐述,应当指出:对于本工艺领域的普通工艺人员来说,在不脱离本发明原理的前提下,对本发明的各种等价形式的修改均落于本申请所附权利要求所限定的范围。
实施例:
如图1-2所示,机器人模块化结构组件,包括:结构支架1,所述结构支架1之间通过结构节点2固定连接,所述结构支架1的内侧固定有模块化主机箱3,所述结构支架1的外侧固定有结构外观件4,所述结构支架1的上端固定有人机交互屏系统5,模块化主机箱3由结构节点2稳固连接、由结构外观件4进行防护、由人机交互屏系统进行控制,结构紧凑,应用效果好;
如图3-4所示,所述结构支架1包括若干通过结构节点2固定连接的支杆11,所述支杆11为内部中空型,所述支杆11上均匀设有若干镂空口12。
所述镂空孔12包括第一线口121和支杆卡口122,所述第一线口121用于机器人电源线插入和引出,机器人电源线无外露,传输效果好,对数据控制线起到保护作用,所述支杆卡口122用于结构节点2、模块化主机箱3和结构外观件4的卡接固定;
如图6所示,所述结构节点2上设有节点卡口21,所述节点卡口21上设有节点卡扣机构22,所述节点卡扣机构22用于支杆12的固定连接,所述节点卡口21用于模块化主机箱3和结构外观件4的卡接固定,结构支架1连接稳定;
所述节点卡扣机构22包括设在节点卡口21上的连动杆固定架221,所述连动杆固定架211内设有卡锁结构222,所述卡锁结构222上设有盖板223,所述盖板223通过固定螺丝224固定在连动杆固定架221上,通过卡锁结构222,使机器人模块化结构达到快速组装与拆卸的效果;
如图5所示,所述节点卡口21包括平面双向180°结构节点型、平面双向90°结构节点型、平面三向90°结构节点型、平面四向结构节点型、立面三向90°结构节点型、立面四向90°结构节点型和立面五向90°结构节点型,在安装时,选取合适的节点卡口21用于连接,形成稳固的结构支架1,结构支架1包括稳固的底盘,可根据安装需要进行多层固定、延长和转向,继而结合形成机器人框架,支撑性强,根据实际需求调整模块数量即可,降低新机器人的开模与开发成本;
如图7-8所示,所述卡锁结构222包括转动安装在连动杆固定架221上的连动杆2211,所述连动杆2211向外连接有拉杆2212,所述连动杆2211向内连接有连接臂2213,所述连接臂2213向内连接有活动锁臂2214,所述活动锁臂2214上安装有锁头2215,所述锁头2215上固定有转动安装在杆固定架221的活动轴2216,在模块化结构安装闭合时,拉杆2212是放平状态,开锁时,提拉拉杆2212,连动杆2211随之转动,连动杆2211带动固定其上的连;连接臂2213随之转动,并带动活动锁臂2214,活动轴2216进行旋转,锁头2215完成开锁操作,拆卸便捷,操作方便;
如图9所示,所述结构外观件4包括防护板41,所述防护板41的内侧固定有防护板卡扣42,所述防护板卡扣42固定在结构支架1和结构节点2上,防护板41用于防水、防尘,同时可以在上加装LED装饰、机器人其他外设组件,防护组件美观性高。
如图10-11所示,所述模块化主机箱3包括箱体31,所述箱体31的外侧设有若干螺丝孔311、箱体卡扣312和箱体卡口313,所述箱体31安装有箱盖32,所述箱盖32通过箱盖卡扣33和快开锁34安装在箱体31上,所述箱体31和箱盖32上分别设有第二线口35,螺丝孔311用于固定不同规格的设备,兼容多种设备,同时箱体31与箱盖32上预留了多个第二线口35便于内部机器人控制设备的数据线接入和引出,对数据线起到很好的保护作用,控制应用稳定,安装多个主机箱,功能齐全,应用效果好。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
- 机器人模块化结构组件
- 一种基于并联式模块化结构的可重构轮足机器人