一种基于光纤传感器的体征分布式监测方法和系统
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及生命体征监测技术领域,特别涉及一种基于光纤传感器的体征分布式监测方法和系统。
背景技术
光纤传感器的基本工作原理是将来自光源的光经过光纤送入调制器,使待测参数与进入调制区的光相互作用后,导致光的光学性质(如光的强度、波长、频率、相位、偏振态等)发生变化,称为被调制的信号光,再利用被测量对光的传输特性施加的影响,完成测量。
在医学上,通过采用光纤传感器进行生命体征的监测,现有都是通过将传感器部件贴附到病人生体表,属于接触式测量,贴附后影响病人动作并且当病人需要起身后躺下需要进行重新贴附,极其麻烦。
现有技术中,也并不能将监测信息与待测人员历史信息结合分析。
发明内容
本发明目的之一在于提供了一种基于光纤传感器的体征分布式监测方法,自动进行光纤传感器位置调整,无需贴附操作,更加便捷。
本发明实施例提供的一种基于光纤传感器的体征分布式监测方法,包括:
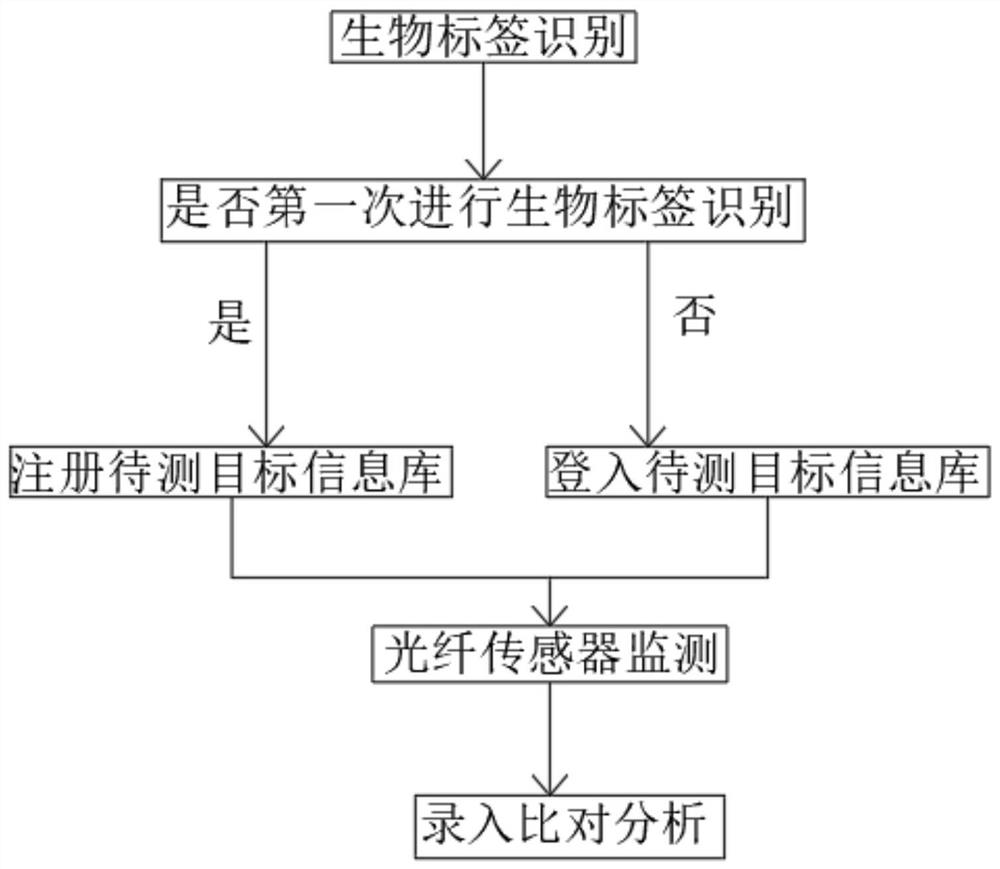
S1对待测目标进行生物标签识别;
S2注册或登录待测目标信息库;
S3进行光纤传感器监测;
S4录入并比对待测目标监测信息;
所述生物标签识别包括指纹识别、面容识别和语音识别;
当待测目标为第一次进行生物标签识别时,建立注册待测目标信息库,并将生物标签加密为登录待测目标信息库密钥;当待测目标非第一次进行生物标签识别,匹配对应其生物标签的待测目标信息库;
对待测目标进行定位,确定待测目标的位置信息及位姿信息;
对位置信息和位姿信息进行分析,确定检测位置及检测姿态;
基于检测位置,控制光纤传感器的搭载模块的动作。
优选的,对待测目标进行定位,确定待测目标的位置信息及位姿信息,包括:
通过设置在病房内的第一图像采集模块获取病床区域内的第一图像;
对第一图像进行轮廓识别;
确定是否存在人体轮廓并确定人体轮廓是否位于病床上;
当人体轮廓位于病床上时,提取人体轮廓并确定人体轮廓位于病床的位置信息;
基于人体轮廓和预设的姿态识别库,确定位姿信息。
优选的,对位置信息和位姿信息进行分析,确定检测位置,包括:
构建包含病床的三维分析空间;
基于位姿信息,从预设的人体模型库中,提取对应位姿信息的人体模型;
基于位置信息,将人体模型映射至三维分析空间;
提取人体模型上的预设的测试目标区域;
基于测试目标区域和传感器位置与测试目标区域位置关联库,确定检测位置及检测姿态。
优选的,基于检测位置及检测姿态,控制光纤传感器的搭载模块的动作,包括:
确定设置在病床上的多个预设位置在三维分析空间中各自的对应的定位点;
确定搭载模块的当前状态以及搭载模块的设置位置对于预设位置的位置关系;
基于当前状态、位置关系和定位点,将光纤传感器的第一三维模型映射至三维分析空间中;
基于检测位置和检测姿态,将光纤传感器的第二三维模型映射至三维分析空间中;
获取第一三维模型上至少两个预设的第一采样点的第一坐标信息;
获取第二三维模型上至少两个预设的分别与第一采样点对应的第二采样点的第二坐标信息;
基于第一坐标信息、第二坐标信息和当前状态,构建调整参数集;
获取预设的调整数据库;
基于调整参数集和调整数据库,确定搭载模块的动作的控制参数集。
优选的,搭载模块包括:
底座,固定设置在病床上方的天花板上;
机械臂,设置底座上,其末端设置有光纤传感器。
优选的,基于光纤传感器的体征分布式监测方法,还包括:
通过设置在病床的床头的语音采集模块获取第一语音信息;
对第一语音信息进行分析;
当第一语音信息的分析结果为触发词且第一语音信息对应的人员为待测目标时,确定触发搭载模块的复位模式;
当触发复位模式后,控制搭载模块复位至初始位置;
在复位后,通过对第一图像采集模块采集的第一图像进行分析,当病床上再次出现人体轮廓,并且人体轮廓符合预设的再次启动要求时,启动搭载模块动作再次对待测目标进行检测;将待测目标置为非触发人;
当医护人员触发复位模式后,再将待测目标置为触发人。
优选的,基于光纤传感器的体征分布式监测方法,还包括:
在搭载模块动作完成后,通过设置在搭载模块的末端且位于光纤传感器旁的第二图像采集模块获取第二图像;
对第二图像进行识别,识别待测目标上的标记;
当未识别到标记时,控制搭载模块回退至初始状态;
当识别到标记时,基于标记在第二图像中的位置,对光纤传感器的位置进行微调。
本发明还提供一种用于生命体征的光纤传感器监测系统,包括:
定位模块,用于对待测目标进行定位,确定待测目标的位置信息及位姿信息;
确定模块,用于对位置信息和位姿信息进行分析,确定检测位置及检测姿态;
控制模块,用于基于检测位置,控制光纤传感器的搭载模块的动作。
优选的,定位模块对待测目标进行定位,确定待测目标的位置信息及位姿信息,执行如下操作:
通过设置在病房内的第一图像采集模块获取病床区域内的第一图像;
对第一图像进行轮廓识别;
确定是否存在人体轮廓并确定人体轮廓是否位于病床上;
当人体轮廓位于病床上时,提取人体轮廓并确定人体轮廓位于病床的位置信息;
基于人体轮廓和预设的姿态识别库,确定位姿信息。
优选的,确定模块对位置信息和位姿信息进行分析,确定检测位置,执行如下操作:
构建包含病床的三维分析空间;
基于位姿信息,从预设的人体模型库中,提取对应位姿信息的人体模型;
基于位置信息,将人体模型映射至三维分析空间;
提取人体模型上的预设的测试目标区域;
基于测试目标区域和传感器位置与测试目标区域位置关联库,确定检测位置及检测姿态。
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
图1为本发明光纤传感器监测方法的示意图;
图2为本发明光纤传感器系统的示意图;
图3为本发明光纤传感器的体征分布式监测方法的流程图。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
本发明实施例提供了一种基于光纤传感器的体征分布式监测方法,
S1对待测目标进行生物标签识别;
S2注册或登录待测目标信息库;
S3进行光纤传感器监测;
S4录入并比对待测目标监测信息;
基于光纤传感器的体征分布式监测方法,所述生物标签识别包括指纹识别、面容识别和语音识别;当待测目标为第一次进行生物标签识别时,建立注册待测目标信息库,并将生物标签加密为登录待测目标信息库密钥;当待测目标非第一次进行生物标签识别,匹配对应其生物标签的待测目标信息库。
光纤传感器监测包括:
步骤S1:对待测目标进行定位,确定待测目标的位置信息及位姿信息;
步骤S2:对位置信息和位姿信息进行分析,确定检测位置及检测姿态;
步骤S3:基于检测位置,控制光纤传感器的搭载模块的动作。
上述技术方案的工作原理及有益效果为:
待测目标为病人,首先对在病床上的病人进行定位,主要确定病人在病床上的位置(位置信息)以及姿态(位姿信息);根据病人的位置和姿态,确定光纤传感器的检测位置及检测姿态;进而实现调整搭载模块的动作,使光纤传感器移动到检测位置并调整好检测姿态;通过上述步骤实现光纤传感器的自动定位,无需进行传感器的贴附,实现当移动病人或病人主动移动前后的监测定位。其中,光纤传感器主要监测的生命体征包括体温、脉搏、心率、呼吸率等。
在一个实施例中,对待测目标进行定位,确定待测目标的位置信息及位姿信息,包括:
通过设置在病房内的第一图像采集模块获取病床区域内的第一图像;第一图像采集模块包括第一摄像头,设置在病床对应的墙壁上方,拍摄方向正对着病床;
对第一图像进行轮廓识别;轮廓识别主要识别出病床的轮廓以及人体轮廓;
确定是否存在人体轮廓并确定人体轮廓是否位于病床上;当同时识别出人体轮廓和病床轮廓时,确定人体轮廓的边界是否位于病床轮廓的边界内;当是时,确定人体轮廓位于病床上;
当人体轮廓位于病床上时,提取人体轮廓并确定人体轮廓位于病床的位置信息;位置信息包括:人体轮廓对应的头部在病床的位置、脚部在病床的位置,中心在病床的位置等;
基于人体轮廓和预设的姿态识别库,确定位姿信息。将人体轮廓与姿态识别库中各个标准轮廓进行匹配,基于匹配符合的标准轮廓对应关联的位姿数据确定病人的位姿信息。
在一个实施例中,对位置信息和位姿信息进行分析,确定检测位置,包括:
构建包含病床的三维分析空间;
基于位姿信息,从预设的人体模型库中,提取对应位姿信息的人体模型;
基于位置信息,将人体模型映射至三维分析空间;
提取人体模型上的预设的测试目标区域;测试目标区域为女性可以采用人体胸部靠近脖子部分、男性可以采用心脏外侧的胸部位置、脖子靠近动脉的位置等;
基于测试目标区域和传感器位置与测试目标区域位置关联库,确定检测位置及检测姿态。
上述技术方案的工作原理及有益效果为:
采用三维分析空间的方法进行位姿以及位置的映射,将对应的人体模型映射至三维分析空间,根据人体模型的预设的测试目标区域进行检测位置及检测姿态的确定,实现依据病人的位置和位姿进行测试位置的定位,便于实现光纤传感器的定位;其中,基于测试目标区域和传感器位置与测试目标区域位置关联库,确定检测位置及检测姿态,具体可以实施为提取测试目标区域的中心的坐标参数和边缘区域上至少两个点的坐标参数;将其按照次序排列,形成调取参数集;将调取参数集与传感器位置与测试目标区域位置关联库的各个定位参数集进行匹配;提取与调取参数集匹配的定位参数集对应关联的测试参数集,解析测试参数集,确定检测位置及检测姿态;测试参数集主要以点位的坐标参数形式限定检测位置及检测姿态;在构建传感器位置与测试目标区域位置关联库时,首先测试目标区域对应的中心点和边缘两点确定一个平面,确定经过中心点且垂直与平面的直线,在直线上确定对应光纤传感器最佳测量距离的点位为检测位置对应的点位,将光纤传感器对应的模型基于该直线为轴线以及检测位置对应的点位映射,将模型对应区域进行点位的坐标的提取,确定检测姿态。
在一个实施例中,基于检测位置及检测姿态,控制光纤传感器的搭载模块的动作,包括:
确定设置在病床上的多个预设位置在三维分析空间中各自的对应的定位点;
确定搭载模块的当前状态以及搭载模块的设置位置对于预设位置的位置关系;
基于当前状态、位置关系和定位点,将光纤传感器的第一三维模型映射至三维分析空间中;
基于检测位置和检测姿态,将光纤传感器的第二三维模型映射至三维分析空间中;
获取第一三维模型上至少两个预设的第一采样点的第一坐标信息;
获取第二三维模型上至少两个预设的分别与第一采样点对应的第二采样点的第二坐标信息;
基于第一坐标信息、第二坐标信息和当前状态,构建调整参数集;当前状态为搭载模块的各个自由度上的动作量;将第一坐标信息的坐标值、第二坐标信息的坐标值及各个自由度上的动作量按次序排列形成调整参数集;
获取预设的调整数据库;调整数据库为事先经过专业工作人员构建;
基于调整参数集和调整数据库,确定搭载模块的动作的控制参数集。
上述技术方案的工作原理及有益效果为:
通过在现实空间中,在病床上设置的多个预设位置设置定位模块、在光纤传感器上设置定位模块,实现病床与光纤传感器的位置定位,进而实现三维分析空间中的定位向现实空间中映射,实现了搭载模块的动作调整。其中,基于调整参数集和调整数据库,确定搭载模块的动作的控制参数集,具体为将调整参数集与调整数据库中各个标识参数集进行匹配,将匹配符合的标识参数集对应的控制参数集作为控制搭载模块的动作的控制参数集;匹配可以采用计算相似度的方式,相似度的计算可以采用余弦相似度计算法。
在一个实施例中,搭载模块包括:
底座,固定设置在病床上方的天花板上;
机械臂,设置底座上,其末端设置有光纤传感器。
上述技术方案的工作原理及有益效果为:
搭载模块为调整光纤传感器与人体相对位置的机构,主要可以采用机械臂的方式搭载,将其设置在病床上方的天花板是避免妨碍病人家属以及医护工作人员在病房内的移动。机械臂可以采用六自由度的机械臂,实现精确的光纤传感器位置的调整。
在一个实施例中,基于光纤传感器的体征分布式监测方法,还包括:
通过设置在病床的床头的语音采集模块获取第一语音信息;
对第一语音信息进行分析;
当第一语音信息的分析结果为触发词且第一语音信息对应的人员为待测目标时,确定触发搭载模块的复位模式;
当触发复位模式后,控制搭载模块复位至初始位置;
在复位后,通过对第一图像采集模块采集的第一图像进行分析,当病床上再次出现人体轮廓,并且人体轮廓符合预设的再次启动要求时,启动搭载模块动作再次对待测目标进行检测;将待测目标置为非触发人;
当医护人员触发复位模式后,再将待测目标置为触发人。
上述技术方案的工作原理及有益效果为:
通过病人采用语音控制搭载模块复位,实现当病人起身活动等情况下的搭载模块复位以及再次进行监测;此外,当病人无法动作时,触发人员还可以为病人家属,方便病人家属对病人的日常护理;通过在病人或者病人家属触发后将病人或者病人家属置为非触发人,然后经由医护人员触发后再将其置为触发人,避免病人或病人家属的频繁触发,造成搭载模块的频繁动作的损坏。触发词包括:我要起身;医护人员触发复位模式的触发词为“XX号床的监测装置复位”。此外,人体轮廓符合预设的再次启动要求,具体为人体轮廓位于病床轮廓中。
在一个实施例中,基于光纤传感器的体征分布式监测方法,还包括:
在搭载模块动作完成后,通过设置在搭载模块的末端且位于光纤传感器旁的第二图像采集模块获取第二图像;
对第二图像进行识别,识别待测目标上的标记;
当未识别到标记时,控制搭载模块回退至初始状态;
当识别到标记时,基于标记在第二图像中的位置,对光纤传感器的位置进行微调。
上述技术方案的工作原理及有益效果为:
在搭载模块动作完成将光纤传感器送到检测位置时,通过第二图像采集模块采集的图像进行光纤传感器的检测位置的确定,其中标记是事先通过可擦拭记号笔书写至人体皮肤位置,在移动完成后,为识别到标记,说明进入病床的人员并不是待测目标,因此通过回退操作,无需进行监测;系统设置时,标记的中心位于第二图像的中心位置时,光纤传感器的位置无偏差;根据标记的中心与第二图像的中心位置偏差情况进行相应的位置微调,保证光纤传感器的检测位置的精准定点检测。
本发明还提供一种用于生命体征的光纤传感器监测系统,如图2所示,包括:
定位模块1,用于对待测目标进行定位,确定待测目标的位置信息及位姿信息;
确定模块2,用于对位置信息和位姿信息进行分析,确定检测位置及检测姿态;
控制模块3,用于基于检测位置,控制光纤传感器的搭载模块的动作。
在一个实施例中,定位模块1对待测目标进行定位,确定待测目标的位置信息及位姿信息,执行如下操作:
通过设置在病房内的第一图像采集模块获取病床区域内的第一图像;
对第一图像进行轮廓识别;
确定是否存在人体轮廓并确定人体轮廓是否位于病床上;
当人体轮廓位于病床上时,提取人体轮廓并确定人体轮廓位于病床的位置信息;
基于人体轮廓和预设的姿态识别库,确定位姿信息。
在一个实施例中,确定模块2对位置信息和位姿信息进行分析,确定检测位置,执行如下操作:
构建包含病床的三维分析空间;
基于位姿信息,从预设的人体模型库中,提取对应位姿信息的人体模型;
基于位置信息,将人体模型映射至三维分析空间;
提取人体模型上的预设的测试目标区域;
基于测试目标区域和传感器位置与测试目标区域位置关联库,确定检测位置及检测姿态。
在一个实施例中,控制模块3基于检测位置及检测姿态,控制光纤传感器的搭载模块的动作,执行如下操作:
确定设置在病床上的多个预设位置在三维分析空间中各自的对应的定位点;
确定搭载模块的当前状态以及搭载模块的设置位置对于预设位置的位置关系;
基于当前状态、位置关系和定位点,将光纤传感器的第一三维模型映射至三维分析空间中;
基于检测位置和检测姿态,将光纤传感器的第二三维模型映射至三维分析空间中;
获取第一三维模型上至少两个预设的第一采样点的第一坐标信息;
获取第二三维模型上至少两个预设的分别与第一采样点对应的第二采样点的第二坐标信息;
基于第一坐标信息、第二坐标信息和当前状态,构建调整参数集;
获取预设的调整数据库;
基于调整参数集和调整数据库,确定搭载模块的动作的控制参数集。
在一个实施例中,搭载模块包括:
底座,固定设置在病床上方的天花板上;
机械臂,设置底座上,其末端设置有光纤传感器。
在一个实施例中,用于生命体征的光纤传感器监测系统还包括:语音控制模块,
语音控制模块执行如下操作:
通过设置在病床的床头的语音采集模块获取第一语音信息;
对第一语音信息进行分析;
当第一语音信息的分析结果为触发词且第一语音信息对应的人员为待测目标时,确定触发搭载模块的复位模式;
当触发复位模式后,控制搭载模块复位至初始位置;
在复位后,通过对第一图像采集模块采集的第一图像进行分析,当病床上再次出现人体轮廓,并且人体轮廓符合预设的再次启动要求时,启动搭载模块动作再次对待测目标进行检测;将待测目标置为非触发人;
当医护人员触发复位模式后,再将待测目标置为触发人。
在一个实施例中,用于生命体征的光纤传感器监测系统,还包括:微调模块,
微调模块执行如下操作:
在搭载模块动作完成后,通过设置在搭载模块的末端且位于光纤传感器旁的第二图像采集模块获取第二图像;
对第二图像进行识别,识别待测目标上的标记;
当未识别到标记时,控制搭载模块回退至初始状态;
当识别到标记时,基于标记在第二图像中的位置,对光纤传感器的位置进行微调。
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 一种用于监测人体生命体征参数的光纤微弯传感器
- 一种基于光纤传感器的生命体征监测系统及方法
- 基于分布式光纤传感器的交通状况监测系统及监测方法