一种夹牛状态监控系统
文献发布时间:2023-06-19 19:35:22
技术领域
本发明涉及牛舍监控领域,尤其是夹牛状态监控系统。
背景技术
目前牛舍的监控,主要针对实现精准喷淋设置,检测牛是否进入喷淋范围。常用的检测设备两类:一类是红外、雷达或超声波感应器,另外一类是摄像头。
红外、雷达或超声波感应器,人、牛、车辆都没办法区分开来,没办法检测牛颈枷的夹牛状态。且红外、雷达或超声波感应器容易受牛舍内环境温湿度、牛舍灰尘、感应距离的影响,牧场用户认可度较低。
摄像头克服了红外、雷达或超声波感应器的一些缺点,不受环境温湿度、感应距离的影响,也可以区分人员、车辆,以及监控牛颈枷的夹牛状态,相对于雷达感应方式有了明显的提升,但在当前并未运用于实现夹牛状态监控。但是牛舍中空气环境比较恶劣,夏季牛舍两边窗口开放,有灰尘,还有饲喂草料、卧床垫料等形成的灰尘;牛舍内有喷淋水和牛只尿粪排泄物,湿度大,久之会在物体表面附着一层污垢;牛粪、牛打嗝放屁产生的甲烷、氨气等气体,会对物体表面腐蚀,有研究表明,一头高产奶牛一年的温室气体排放量相当于一辆小汽车一年的废气排放量;尤其夏季苍蝇多会有苍蝇屎附着在照明灯具、摄像头上,很难清洗。这些不利条件不止会使得摄像头透镜外部脏污,还会加速摄像头内部感光系统元件老化,导致性能降低,摄像头识别精确度逐渐降低,影响使用效果。
综上,目前还没有对牛舍中牛颈枷夹牛状态实施监控的措施。
发明内容
有鉴于此,本发明的主要目的在于提供一种夹牛状态监控系统,通过监控牛颈枷的活动杆进入有牛位置及持续在该位置的时长,实现监控牛颈枷夹牛状态,并依据夹牛状态预警或发出警报,避免了发生夹牛超时危害牛健康的情况。
为达到上述目的,本申请提供了一种夹牛状态监控系统,包括:监控模块、定位器、预警模块、警报器;其中,
定位器设置在牛颈枷的活动杆上,检测该活动杆是否在设定的有牛范围内,并在活动杆在有牛范围内时,上传有牛信息;
监控模块,用于接收有牛信息,记录接收时间和上传该有牛信息的定位器,并依据记录监测该定位器连续上传有牛信息的时长;监控到有定位器的所述时长超出第一设定时间,认为该定位器所在牛颈枷进入夹牛状态;监控到进入夹牛状态的定位器不少于定位器总数的30%时,开始计时,直至日常工作夹牛的定位器中断上传有牛信息,并在计时超出第二设定时间时,触发预警模块,在计时超出第三设定时间时,触发警报器;
预警模块,用于被触发后发出预警;
警报器,用于被触发后发出警报。
在一个可能的实现中,所述第一设定时间取值范围为5~8分钟,所述第二设定时间取值范围为35~45分钟,所述第三设定时间取值范围为40~60分钟。
在另一个可能的实现中,所述监控模块,还用于监控到进入夹牛状态的定位器不足定位器总数的20%时,每间隔第四设定时间,触发一次警报器,直至异常夹牛的定位器中断上传有牛信息。
在另一个可能的实现中,所述第四设定时间的取值范围为5~10分钟。
在另一个可能的实现中,还包括采集模块,用于接收定位器上传的有牛信息并转发给监控模块。
在另一个可能的实现中,所述定位器包括:加速度传感器、计算模块和通信模块;其中,
加速度传感器检测该活动杆水平/垂直方向的加速度;
计算模块,通过该水平/垂直方向的加速度,计算该活动杆与水平面的夹角;确定该活动杆与水平面的夹角是否在所述有牛范围内,并在夹角在所述有牛范围内时发送有牛信息给通信模块;
通信模块,将接收到的有牛信息上传给控制器;
所述有牛范围为(80°,100°)。
在另一个可能的实现中,所述定位器包括:加速度传感器、计算模块和通信模块;其中,
加速度传感器检测该活动杆水平方向的加速度;
计算模块,确定该水平方向的加速度是否在所述有牛范围内,并在水平方向的加速度在所述有牛范围内时发送有牛信息给通信模块;
通信模块,将接收到的有牛信息上传给控制器;
所述有牛范围为(985,1000mg)。
在另一个可能的实现中,所述定位器包括:加速度传感器、计算模块和通信模块;其中,
加速度传感器检测该活动杆垂直方向的加速度;
计算模块,确定该垂直方向的加速度是否在所述有牛范围内,并在垂直方向的加速度在所述有牛范围内时发送有牛信息给通信模块;
通信模块,将接收到的有牛信息上传给控制器;
所述有牛范围为(-174,174mg)。
附图说明
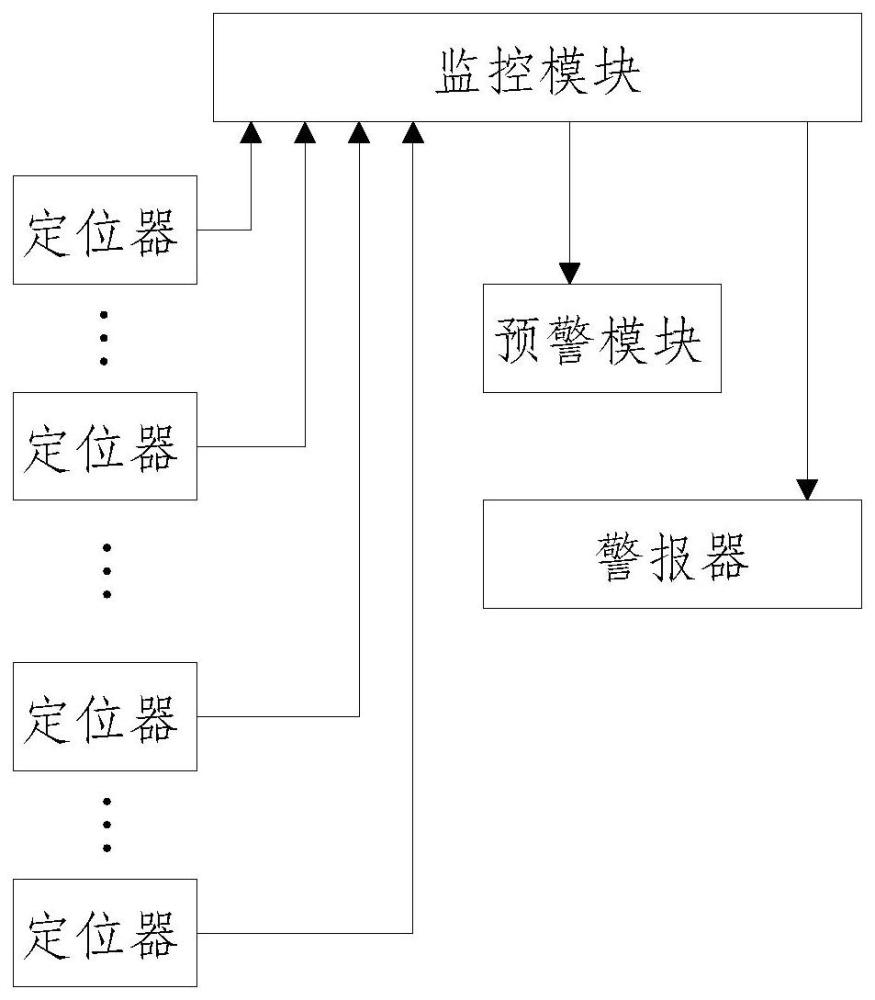
图1为本发明实施例一种夹牛状态监控系统的结构示意图;
图2为牛颈枷结构示意图;
图3为牛颈枷夹牛状态示意图。
具体实施方式
具体的,本发明实施例一种夹牛状态监控系统如图1所示,包括:监控模块、定位器、预警模块、警报器;其中,
定位器设置在牛颈枷的活动杆上,检测该活动杆是否在设定的有牛范围内,并在活动杆在有牛范围内时,上传有牛信息;
监控模块,用于接收有牛信息,记录接收时间和上传该有牛信息的定位器,并依据记录监测该定位器连续上传有牛信息的时长;监控到有定位器的所述时长超出第一设定时间,认为该定位器所在牛颈枷进入夹牛状态;监控到进入夹牛状态的定位器不少于定位器总数的30%时,认为进入夹牛状态的定位器所在牛颈枷进入日常工作夹牛状态,开始计时,直至日常工作夹牛的定位器中断上传有牛信息,并在计时超出第二设定时间时,触发预警模块,在计时超出第三设定时间时,触发警报器;
预警模块,用于被触发后发出预警;
警报器,用于被触发后发出警报。
其中,所述第一设定时间取值范围为5~8分钟,所述第二设定时间取值范围为35~45分钟,所述第三设定时间取值范围为40~60分钟。
这里,所述有牛范围是指,牛低头进食压下牛颈枷的活动杆底部时,活动杆所处位置的范围,可以通过活动杆和水平面的夹角、活动杆水平/垂直方向的加速度,或者活动杆水平方向的加速度变化量来表征。牛进食的习惯是低头采食30秒~3分钟后抬头咀嚼一次,抬头咀嚼时,撤销了对活动杆底部的压力,活动杆转动回到不受外力时的状态,如图2所示,转到有牛范围外,定位器中断上传有牛信息。如2中,①为50*50方管,②为活动杆,③为槽钢支架,④为Φ42固定立管,⑤为配重铁,⑥为蝴蝶锁卡。
鉴于此,本发明实施例在监测到定位器连续上传有牛信息的时长超出第一设定时间,则认为该定位器所在牛颈枷进入夹牛状态,此时,如图3所示,活动杆被蝴蝶锁卡⑥锁死在有牛范围内,同时牛被锁定在牛颈枷上无法离开,且该第一设定时间的取值范围为5~8分钟,确保进入夹牛状态。日常工作夹牛一般选在牛集中采食时,由此,在监控到进入夹牛状态的定位器不少于定位器总数的30%时,认为进入日常工作夹牛状态。这里,定位器总数一般指,设置所述系统的包含的定位器的数量。
一般日常工作夹牛时间需要控制在40分钟内。本发明实施例在超出所述第二设定时间时,发出预警信息给工作人员,提醒工作人员即将到达40分钟;在超出第三设定时间,仍未结束夹牛时,触发警报器,警醒工作人员日常工作夹牛操作超时,打开蝴蝶锁卡⑥结束夹牛,以免给牛造成伤害。
在一个可能的实现中,所述监控模块,还用于监控到进入夹牛状态的定位器不足定位器总数的20%时,认为时长超出的定位器所在牛颈枷发生了异常夹牛,每间隔第四设定时间,触发一次警报器,直至异常夹牛的定位器中断上传有牛信息。
其中,所述第四设定时间的取值范围为5~10分钟。
这里,所述异常夹牛是指,因牧场工作人员对牛颈枷操作不当,或者牛颈枷故障,牛上枷采食时被锁住。牛是群体动物,个别牛只落单被夹住时间过长,会产生非常严重的牛只应激,造成“掉奶”或牛只挣扎受伤等。这些后果一般在异常夹牛超出15分钟后产生,而异常夹牛不容易被工作人员及时发现,进而不能及时处理。
鉴于此,在监测到异常夹牛,每隔第四设定时间发出警报,通知工作人员发生异常夹牛,并催促工作人员及时处理,进而使得异常夹牛事件能够被及早发现及时处理,避免了异常夹牛带来的严重后果。
在另一个可能的实现中,还包括采集模块,用于接收定位器上传的有牛信息并转发给监控模块。
目前常见的牛舍,其中的牛颈枷划分了多个跨,每跨八个牛颈枷,每个牛颈枷的活动杆上设置一个定位器。牛舍包括太多跨,距离跨度太大,定位器采用短距离传输,例如,低功耗蓝牙技术,没法直接与所述监控模块通信时,通过每个跨或数个跨设置一个采集模块转发。
在另一个可能的实现中,所述定位器包括:加速度传感器、计算模块和通信模块;其中,
加速度传感器检测该活动杆水平/垂直方向的加速度;
计算模块,通过该水平/垂直方向的加速度,计算该活动杆与水平面的夹角;确定该活动杆与水平面的夹角是否在所述有牛范围内,并在夹角在所述有牛范围内时发送有牛信息给通信模块;
通信模块,将接收到的有牛信息上传给控制器;
所述有牛范围为(80°,100°)。
进一步的,所述通过水平方向的加速度计算该活动杆与水平面的夹角为:
将所述水平方向的加速度代入如下公式算得活动杆与水平面的夹角α:
α=arcsin(A/g)
其中:A为测得的水平方向的加速度;g为重力加速度。
所述通过水平方向的加速度计算该活动杆与水平面的夹角为:
将所述垂直方向的加速度代入如下公式算得活动杆与水平面的夹角α:
α=arccos(B/g)
其中:B为测得的垂直方向的加速度;g为重力加速度。
牛低头采食时,会压下活动杆下方使得活动杆垂直,考虑活动杆安装、定位器检测的误差,这里,设置所述有牛范围为(80°,100°),即,活动杆与水平面的夹角落入(80°,100°)范围,认为定位器处有牛。
在另一个可能的实现中,所述定位器包括:加速度传感器、计算模块和通信模块;其中,
加速度传感器检测该活动杆水平方向的加速度;
计算模块,确定该水平方向的加速度是否在所述有牛范围内,并在水平方向的加速度在所述有牛范围内时发送有牛信息给通信模块;
通信模块,将接收到的有牛信息上传给控制器;
所述有牛范围为(985,1000mg)。
当活动杆垂直时,即活动杆与水平面的夹角α=90°时,水平方向的加速度为1000mg;当α=80°时,水平方向的加速度为985mg;当α=100°时,水平方向的加速度为985mg;其中,g为重力加速度,1mg=1/1000g。
在另一个可能的实现中,所述定位器包括:加速度传感器、计算模块和通信模块;其中,
加速度传感器检测该活动杆垂直方向的加速度;
计算模块,确定该垂直方向的加速度是否在所述有牛范围内,并在垂直方向的加速度在所述有牛范围内时发送有牛信息给通信模块;
通信模块,将接收到的有牛信息上传给控制器;
所述有牛范围为(-174,174mg)。
当活动杆垂直时,即活动杆与水平面的夹角α=90°时,垂直方向的加速度为0mg;当α=80°时,垂直方向的加速度为174mg;当α=100°时,垂直方向的加速度为-174mg。
以上所述,仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。