一种用于环境试验的自动采样器
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及取样器技术领域,更具体地说,它涉及一种用于环境试验的自动采样器。
背景技术
在环境试验中,由于涉及的因素较多,比如试验面积大、时间跨度时间长、试验环境要素多等问题,为了提高试验的准确度,通常采用取样的方式,在试验环境中对具有代表特征的区域进行采样,并对采样的样品进行检测。
经检索,中国专利(公开号:CN112729943A)公开了一种车载式采样装置,该专利包括用于竖向安装于移动车上的升降臂组件,升降臂组件上设有横向布置的伸缩臂组件,伸缩臂组件的伸缩端设有铲斗组件,伸缩臂组件上还设有接料斗组件,伸缩臂组件用于伸出将铲斗组件伸至车厢内进行采样后再缩回、以使缩回后的铲斗组件处于接料斗组件上方进行卸料,升降臂组件用于带动伸缩臂组件下降以使伸出后的铲斗组件落放于采样点进行采样、并在采样后带动伸缩臂组件上升以便于铲斗组件从车厢内缩回至接料斗组件上方。
随技术的发展,在对试验面积较大的区域进行取样时,通常将采样器与运输设备进行组装,以降低工作人员的劳动强度;
并且基于自动化和电气化设备的发展,采样器的工作也趋向于自动化作业,因此,本申请提出了一种用于环境试验的自动采样器。
发明内容
针对现有技术存在的不足,本发明的目的在于提供一种用于环境试验的自动采样器。
为实现上述目的,本发明提供了如下技术方案:一种用于环境试验的自动采样器,包括设备箱,所述设备箱的外侧设置有组装部位;设备箱基于组装部位,与所需的运输设备进行组装;
所述设备箱的两侧均通过合页铰接有检测板,在日常工作时,检测板固定在设备箱的侧边,在检修时,将其展开,即可将设备箱内部的空间漏出;
两组所述检测板的侧面均开设有贯通口,两组所述贯通口的内部安装有多个遮挡件;多个遮挡件在未受力时,垂直分布并且对贯通口进行遮挡;
所述设备箱内部位于两组贯通口之间安装有旋转架,且设备箱内部安装有贯穿旋转架的侧推结构,所述设备箱内部位于旋转架的一侧安装有固定架,所述固定架的内部安装有至少一组容纳箱;
容纳箱的内部安装有多个取样机构,取样机构为固体采样器、液体采样器或空气质量采样器中的任一种;
所述旋转架的上侧安装有三组滑轨,两组滑轨分别朝向两组贯通口,一组滑轨朝向固定架;
两组贯通口之间与固定架垂直分布;
各个所述滑轨的上侧均安装有夹持结构,各个夹持结构均基于侧推结构,进行水平方向移动。
进一步的,所述固定架包括与设备箱相连接的架体,所述架体的内部旋转连接有旋转框,且架体的上侧安装有第一转动机构,第一转动机构的输出端与旋转框相连接;
多个容纳箱安装在旋转框的内部时,第一转动机构通过旋转旋转框,将不同的容纳箱分别转动至对应滑轨的一侧,即转动后,垂直于固定架方向的一组滑轨正对转动后的容纳箱。
进一步的,所述架体内的上、下端均安装有至少一组电磁吸附件,各个电磁吸附件分别位于对应容纳箱的两端;
在电磁吸附件启动后,将容纳箱固定在旋转框的内部。
进一步的,所述侧推结构包括与设备箱相连接的柱体,所述柱体的内部安装有三组推动气缸;
三组推动气缸在柱体的轴心线上径向分布,并且三组推动气缸分别处于三组高度,形成错位的工作空间。
进一步的,所述夹持结构包括与对应滑轨滑动连接的连接柱,所述连接柱的上侧安装有推动板;
推动板高度不小于三组推动气缸输出端在径向上的高度;
所述连接柱朝向侧推结构的一端与滑轨之间固定连接有弹性件,且连接柱的另一端安装有转向电机,所述转向电机的输出端安装有夹持机械爪。
进一步的,所述容纳箱包括箱体,所述箱体的内部安装有升降机构,所述升降机构的输出端安装有升降架;
所述升降架的内部转动连接有转向架,且升降架的顶部安装有第二转动机构,所述第二转动机构的输出端与转向架相连接,并且箱体的一侧开设有连通口;
在容纳箱转动至对应夹持结构的一侧后,其连通口正对夹持结构。
进一步的,所述转向架的内部设置有多个纵向设置收纳层,各个收纳层均安装有多个吸附架,每个收纳层中的多个吸附架均成环形分布;
每个收纳层的内部均安装有多个取样机构,各个取样机构分别与对应的吸附架吸附连接;
同一容纳箱中的各个取样机构为固体采样器、液体采样器或空气质量采样器中的任一种。
进一步的,固体采样器包括第一组装箱,所述第一组装箱内部的顶端安装有至少一组第一电伸缩架,所述第一电伸缩架的输出端安装有第一取样箱,所述第一取样箱的内部安装有螺旋取样结构;
并且第一组装箱和第二组装箱的底端均与外部连通。
进一步的,空气质量采样器包括第二组装箱,所述第二组装箱内部的顶端安装有至少一组第二电伸缩架,所述第二电伸缩架的输出端安装有第二取样箱,所述第二取样箱内部的上、下两端分别安装有第一收卷机构和第二收卷机构;
所述第一收卷机构和第二收卷机构之间安装与取样带;
所述第二取样箱的两侧均开设有连通箱,并且第二组装箱的底端与外部连通。
进一步的,所述取样带的中间部位设置有多个等距分布的过滤丝网,且取样带靠近过滤丝网的两侧均安装有侧肋条;
取样带基于第一收卷机构和第二收卷机构进行收卷时,侧肋条将取样带之间的各个过滤丝网进行分隔。
进一步的,液体采样器包括第三组装箱,所述第三组装箱内部的顶端安装有至少一组第三电伸缩架,所述第三电伸缩架的输出端安装有第三取样箱,所述第三取样箱的内部顶端安装有储液箱,且第三取样箱的顶部安装有水泵,水泵的输出端与储液箱相连接;
所述第三取样箱内部的底端安装有第三收卷机构;
所述储液箱的下侧安装有洗液管,所述洗液管的底端安装有配重件,所述配重件与第三收卷机构的输出端之间连接有连接绳。
进一步的,自动采样器还包括采集系统,包括规划模块、识别模块和工作模块;
所述规划模块包括:
地形单元,包括环境试验区域的3D地形数据,并且在3D地形数据中,标记有以往的采集点位置数据,并基于样品的形态,以红、蓝、绿进行标记;
其中,红色标记代表固体样品,绿色标记为空气质量样品,蓝色标记为液体样品;
路线单元,基于运输设备的种类以及所需采样的区域,规划匹配值最高的移动路线。
进一步的,匹配值的获取方法,包括以下步骤:
S1:同一样品形态的标记为同一集合的匹配点,手动输入0-N组固定采集点,并在相邻采集点之间设置多个自动采集点;
在取值为0时,为系统随机生成采集点;
S2:将固定采集点进行连接,获取初始路径,识别对应集合内各个匹配点距初始路径的垂直距离,并基于固定比例,将各个匹配点的距离转为调整系数;
S2:手动输入调整系数的修正值,修正值的取值范围为0-1;
修正值的取值越小,距对应匹配点的距离越近,取值为设备箱时,初始路径对应部位的位置不变;
S3:初始路径修正后,获得移动路线。
进一步的,所述识别模块包括:
图像单元,用于获取采集点的图像信息;
判断模块,基于取样机构的工作范围,在图像信息中生成模拟工作区域,将模拟工作区域与图像信息进行对比;
在图像信息中符合模拟工作区域的面积不大于70%时,则确定作业区域,并发出执行指令;
在图像信息中符合模拟工作区域的面积大于70%时,进行自动调整。
进一步的,所述自动调整的方法包括以下步骤:
A1:采用广角镜头,将图像信息进行扩大,获得大比例图像信息,将大比例图像信息靠近移动路线的一侧设置为第一权重移动方向,将垂直于第一权重移动方向的两侧设置为第二权重移动方向,将远离移动路线的一侧设置为第三权重移动方向;
A2:将图像单元依次沿着第一权重移动方向、第二权重移动方向和第三权重移动方向进行移动固定距离,获取持续更新的增加区域;
A3:将增加区域增加至图像信息中,判断模块持续对模拟工作区域与图像信息进行对比;
A4:在沿着固定移动方向移动至固定距离后,若无法获得符合标准的作业区域,则按权重依次更换移动方向;
若沿着第一权重移动方向、第二权重移动方向和第三权重移动方向均无法获得作业区域,则重复A2和A3步骤,并将固定距离增加一倍。
与现有技术相比,本发明具备以下有益效果:
本发明中的设备箱可基于需要,与不同的运输设备进行组装,从而方便在环境试验的区域中进行移动,进而方便进行多个位置的采样;
另一方面,设备箱中可储存中多种和多个数量的取样机构,在使用时,可以根据需要进行调整,从而方便对固体、液体和空气质量进行采样,进而可以增大本发明中自动采样器的采样数量和种类;
进一步,固体采样器、液体采样器或空气质量采样器均独立设置,并且其内部的结构均不同,在采样对应材质的样品时,可以效率更高,并且采样的杨平数量更多。
附图说明
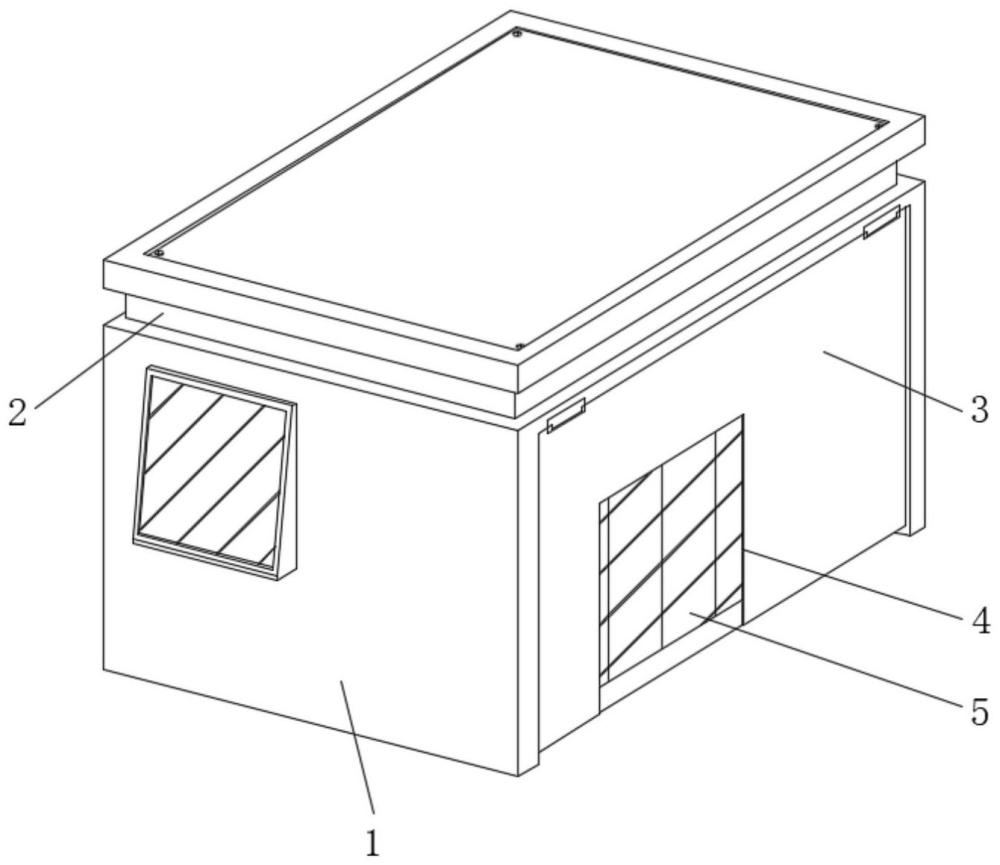
图1为一种用于环境试验的自动采样器的结构示意图;
图2为本发明的侧剖视图;
图3为本发明的正剖视图;
图4为本发明中侧推结构的俯剖视图;
图5为本发明中夹持结构的俯视图;
图6为本发明中容纳箱的剖视图;
图7为本发明中固体采样器的剖视图;
图8为本发明中空气质量采样器的剖视图;
图9为本发明中液体采样器的剖视图。
图中:1、设备箱;2、组装部位;3、检测板;4、贯通口;5、遮挡件;6、侧推结构;7、滑轨;8、夹持结构;9、固定架;10、容纳箱;11、旋转架;91、架体;92、电磁吸附件;93、旋转框;94、第一转动机构;61、柱体;62、推动气缸;81、连接柱;82、弹性件;83、推动板;84、转向电机;85、夹持机械爪;101、箱体;102、升降机构;103、升降架;104、转向架;105、第二转动机构;106、吸附架;107、取样机构;110、第一组装箱;111、第一电伸缩架;112、第一取样箱;113、螺旋取样结构;120、第二组装箱;121、第二电伸缩架;122、侧肋条;123、第二取样箱;124、第一收卷机构;125、第二收卷机构;126、连通箱;127、取样带;128、过滤丝网;130、第三组装箱;131、第三电伸缩架;132、第三取样箱;133、储液箱;134、水泵;135、洗液管;136、配重件;137、第三收卷机构;138、连接绳。
具体实施方式
实施例1
参照图1至图9所示,一种用于环境试验的自动采样器,包括设备箱1,设备箱1的外侧设置有组装部位2;
在此实施例中,环境试验的区域中铺设有固定轨道,并且固定轨道中安装有行驶装置,设备箱1通过组装部位2与行驶装置进行组装;
设备箱1的两侧均通过合页铰接有检测板3,在日常工作时,检测板3固定在设备箱1的侧边,在检修时,将其展开,即可将设备箱1内部的空间漏出;
两组检测板3的侧面均开设有贯通口4,两组贯通口4的内部安装有多个遮挡件5;多个遮挡件5在未受力时,垂直分布并且对贯通口4进行遮挡;
遮挡件5采用柔性的塑料材质;
设备箱1内部位于两组贯通口4之间安装有旋转架11,且设备箱1内部安装有贯穿旋转架11的侧推结构6,设备箱1内部位于旋转架11的一侧安装有固定架9,固定架9的内部安装有三组容纳箱10;
容纳箱10的内部安装有多个取样机构107;
旋转架11的上侧安装有三组滑轨7,两组滑轨7分别朝向两组贯通口4,一组滑轨7朝向固定架9;
各个滑轨7的上侧均安装有夹持结构8,各个夹持结构8均基于侧推结构6,进行水平方向移动。
自动采样器还包括采集系统,包括规划模块、识别模块和工作模块;
规划模块包括:
地形单元,包括环境试验区域的3D地形数据,并且在3D地形数据中,标记有以往的采集点位置数据,并基于样品的形态,以红、蓝、绿进行标记;
其中,红色标记代表固体样品,绿色标记为空气质量样品,蓝色标记为液体样品;
路线单元,基于运输设备的种类以及所需采样的区域,规划匹配值最高的移动路线。
匹配值的获取方法,包括以下步骤:
S1:同一样品形态的标记为同一集合的匹配点,手动输入15组固定采集点,并在相邻采集点之间设置4个自动采集点;
S2:将固定采集点进行连接,获取初始路径,识别对应集合内各个匹配点距初始路径的垂直距离,并基于固定比例,将各个匹配点的距离转为调整系数;
S2:手动输入调整系数的修正值,修正值的取值范围为0.5,即初始路径距对应部位的中间位置;
S3:初始路径修正后,获得移动路线。
识别模块包括:
图像单元,用于获取采集点的图像信息;
判断模块,基于取样机构107的工作范围,在图像信息中生成模拟工作区域,将模拟工作区域与图像信息进行对比;
在图像信息中符合模拟工作区域的面积不大于70%时,则确定作业区域,并发出执行指令;
在图像信息中符合模拟工作区域的面积大于70%时,进行自动调整。
自动调整的方法包括以下步骤:
A1:采用广角镜头,将图像信息进行扩大,获得大比例图像信息,将大比例图像信息靠近移动路线的一侧设置为第一权重移动方向,将垂直于第一权重移动方向的两侧设置为第二权重移动方向,将远离移动路线的一侧设置为第三权重移动方向;
A2:将图像单元依次沿着第一权重移动方向、第二权重移动方向和第三权重移动方向进行移动固定距离,获取持续更新的增加区域;
A3:将增加区域增加至图像信息中,判断模块持续对模拟工作区域与图像信息进行对比;
A4:在沿着固定移动方向移动至固定距离后,若无法获得符合标准的作业区域,则按权重依次更换移动方向;
若沿着第一权重移动方向、第二权重移动方向和第三权重移动方向均无法获得作业区域,则重复A2和A3步骤,并将固定距离增加一倍。
工作模块用于控制设备箱1内部对应的工作单位进行工作。
参照图2所示,固定架9包括与设备箱1相连接的架体91,架体91的内部旋转连接有旋转框93,且架体91的上侧安装有第一转动机构94,第一转动机构94的输出端与旋转框93相连接;
多个容纳箱10安装在旋转框93的内部时,第一转动机构94通过旋转旋转框93,将不同的容纳箱10分别转动至对应滑轨7的一侧。
架体91内的上、下端均安装有三组电磁吸附件92,各个电磁吸附件92分别位于容纳箱10的两端;
在电磁吸附件92启动后,将容纳箱10固定在旋转框93的内部。
参照图4所示,侧推结构6包括与设备箱1相连接的柱体61,柱体61的内部安装有三组推动气缸62;
三组推动气缸62在柱体61的轴心线上径向分布,并且三组推动气缸62分别处于三组高度。
参照图5所示,夹持结构8包括与对应滑轨7滑动连接的连接柱81,连接柱81的上侧安装有推动板83;
推动板83高度不小于三组推动气缸62输出端在径向上的高度;
连接柱81朝向侧推结构6的一端与滑轨7之间固定连接有弹性件82,且连接柱81的另一端安装有转向电机84,转向电机84的输出端安装有夹持机械爪85。
参照图6所示,容纳箱10包括箱体101,箱体101的内部安装有升降机构102,升降机构102的输出端安装有升降架103;
升降架103的内部转动连接有转向架104,且升降架103的顶部安装有第二转动机构105,第二转动机构105的输出端与转向架104相连接,并且箱体101的一侧开设有连通口;
在容纳箱10转动至对应夹持结构8的一侧后,其连通口正对夹持结构8。
转向架104的内部设置有多个纵向设置收纳层,各个收纳层均安装有多个吸附架106,每个收纳层中的多个吸附架106均成环形分布;
每个收纳层的内部均安装有多个取样机构107,各个取样机构107分别与对应的吸附架106吸附连接;
同一容纳箱10中的各个取样机构107为固体采样器,并对环境试验区域中的土壤进行采样。
参照图7所示,固体采样器包括第一组装箱110,第一组装箱110内部的顶端安装有至少一组第一电伸缩架111,第一电伸缩架111的输出端安装有第一取样箱112,第一取样箱112的内部安装有螺旋取样结构113;
并且第一组装箱110和第二组装箱120的底端均与外部连通;
在各个固体采样器位于容纳箱10内部时,其底部的开口朝上设置。
工作原理:
设备箱1移动至作业区域的一侧后,一组容纳箱10基于固定架9转动至对应夹持结构8的一侧,随后侧推结构6中的对应方向一组的推动气缸62启动,将夹持结构8水平移动,直至贯穿对应容纳箱10的连通口至内部;
在夹持结构8移动的同时,其内部的夹持机械爪85展开,在夹持结构8移动后,夹持机械爪85移动至对应容纳箱10中的一组取样机构107外侧,随后夹持机械爪85将一组取样机构107进行夹持;
随后夹持结构8复位,将取样机构107取出,随后旋转架11转动,将取样机构107转动至朝向作业区域的一侧,随后侧推结构6再次启动对应一侧的推动气缸62,将取样机构107移动至组装部位2的外侧,直至作业区域的上侧;
然后夹持结构8中的转向电机84,转动,将取样机构107转动至第一组装箱110底端朝下的位置;
最后第一组装箱110中的第一电伸缩架111启动,将第一取样箱112向下按压,同时螺旋取样结构113启动,将土壤采样至第一取样箱112中;
采样之后,取样机构107复位,直至收纳至容纳箱10中,随后容纳箱10中的第二转动机构105启动,将转向架104进行旋转,将新的一组取样机构107转动至朝向容纳箱10连通口的一侧。
实施例2
相较于实施例1,同一容纳箱10中的各个取样机构107为空气质量采样器,并对环境试验区域中的空气进行采样。
参照图8所示,空气质量采样器包括第二组装箱120,第二组装箱120内部的顶端安装有至少一组第二电伸缩架121,第二电伸缩架121的输出端安装有第二取样箱123,第二取样箱123内部的上、下两端分别安装有第一收卷机构124和第二收卷机构125;
第一收卷机构124和第二收卷机构125之间安装与取样带127;
第二取样箱123的两侧均开设有连通箱126,并且第二组装箱120的底端与外部连通。
在工作时,第一收卷机构124和第二收卷机构125同步启动,第二收卷机构125将收卷的取样带127进行展开,第一收卷机构124将取样带127进行收卷,将新的一组过滤丝网128移动至连通箱126的一侧;
在第二组装箱120位于设备箱1的外侧时,空气从连通箱126中穿过,并经过滤丝网128过滤后排出;
在过滤丝网128过滤空气达到设定时间后,第一收卷机构124和第二收卷机构125再次启动,将取样带127进行收卷,进而将过滤丝网128进行回收,在回收时,取样带127两侧的侧肋条122将取样带127本体进行分隔,避免贴合在一起;
在后续检测时,通过对过滤丝网128单位面积内的杂质进行检测,以获得空气质量信息。
实施例3
相较于实施例1,同一容纳箱10中的各个取样机构107为液体采样器,并对环境试验区域中的水体进行采样。
参照图9所示,液体采样器包括第三组装箱130,第三组装箱130内部的顶端安装有至少一组第三电伸缩架131,第三电伸缩架131的输出端安装有第三取样箱132,第三取样箱132的内部顶端安装有储液箱133,且第三取样箱132的顶部安装有水泵134,水泵134的输出端与储液箱133相连接;
第三取样箱132内部的底端安装有第三收卷机构137;
储液箱133的下侧安装有洗液管135,洗液管135的底端安装有配重件136,配重件136与第三收卷机构137的输出端之间连接有连接绳138。
在工作时,第三组装箱130的底部朝下,基于所需采样的水体深度,第三收卷机构137启动,将洗液管135的底端沉降至水体对应的深度,随后水泵134启动,将水体抽取至储液箱133中进行储存。
实施例4
相较于实施例1,设备箱1通过组装部位2与无人机装置进行组装,并且自动采样器基于无人机进行移动,并按移动路线进行移动。
实施例5
相较于实施例1,设备箱1通过组装部位2与远程控制汽车底座进行组装,并且自动采样器基于控制汽车底座进行移动,并按移动路线进行移动。
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本模板的保护范围。
- 一种用于加速水泥基材料泛碱试验的全自动装置
- 一种环境试验用的酸雨自动采样器
- 一种环境试验用的酸雨自动采样器