一种全自动固液混合食品瓶装机的送瓶装置
文献发布时间:2023-06-19 09:29:07
技术领域:
本发明涉及一种全自动固液混合食品瓶装机的送瓶装置。
背景技术:
在固液食品灌装行业中,设备的技术已经发展到全自动灌装的程度了,从瓶子的输送、固体食品的添加、浸泡液的灌注、对瓶内食品的压实等工序都完全由设备自动完成。目前应用较广的自动化技术是转盘式灌注设备,其技术特点是把瓶子置于转盘上,由转盘带动瓶子进行步进式转动传送,转动的每一步各工位上的功能装置就会对各自正下方的瓶子进行相应的加工工作。在这种转盘式灌注设备中负责向其输送瓶子是依靠输送带完成,输送带把瓶子传送到转盘的外圆周旁边,然后需要推瓶装置把瓶子推送到转盘的工位上。而传统的推瓶装置为推送气缸,由推送气缸的活塞杆被输送带上的瓶子推送转盘上。但采用气缸推送存在不足的地方,主要是转盘的转动需要与推送气缸配合,这就要求对转盘和推送气缸的动作配制多个信号感应器,这样才能保证转盘转动动作与推送气缸的推动动作相互协调。但采用这么多的电子部件存在维修的几率会比较高,而且会存在累积误差,即设备使用一段时间后会产生转盘与推送气缸相互动作不协调的问题,导致瓶子不能准确地被推送到转盘上的设计工位位置,这时需要停机调整,影响正常生产。
发明内容:
本发明的目的是为了克服上述现有技术的缺点,提供一种联动式的全自动固液混合食品瓶装机的送瓶装置。
本发明的发明目的可以通过以下的技术方案来实现:一种全自动固液混合食品瓶装机的送瓶装置,送瓶装置设置在双转盘的旁边,送瓶装置包括有瓶子传送带、过渡板和送瓶转动轴,传送带的两侧设置有限位板,在传送带的传送方向末端设置有过渡板,送瓶转动轴设置在过渡板末端并形成竖立设置,在送瓶转动轴上套装有上外齿轮和下外齿轮,上外齿轮的第一内凹齿口造型与瓶子上部瓶身外形相匹配,下外齿轮的第二内凹齿口造型与瓶子下部瓶身外形相匹配,上外齿轮和下外齿轮的高度位置分别对应瓶子上部和下部,在上外齿轮和下外齿轮之间设置有内弧形引导片和外弧形引导片,内弧形引导片和外弧形引导片之间形成的通道接驳两限位板之间形成的通道,同时内弧形引导片和外弧形引导片的弧形状是从输送带朝转盘方向转向,转盘转动轴与送瓶转动轴之间通过机械传动实现联动。
转盘转动轴与送瓶转动轴之间的机械传动结构是,在驱动电机的减速箱主轴上套装有主动齿轮和主动皮带轮,在转盘转动轴上设置有从动齿轮,主动齿轮与从动齿轮相互啮合传动,在送瓶转动轴上套装有从动皮带轮,主动皮带轮与从动皮带轮之间通过传动带连接传动。
在外弧形引导片的末端都成型有导入片,导入片导入方向与转盘圆周转动方向相同。
采用本技术方案后,与现有技术相比,本技术方案具有以下优点:通过把转盘的转动与送瓶转动轴的转动动作通过机械传动的方式实现联动,这样可保证转盘的转动与上外齿轮和下外齿轮的转动配合更为精准,长时间生产也不会产生累积误差,避免正常生产过程中经常需要停机调节修正误差的问题,提高生产效率。
附图说明:
图1是应用本发明送瓶装置的全自动瓶装机的立体结构图;
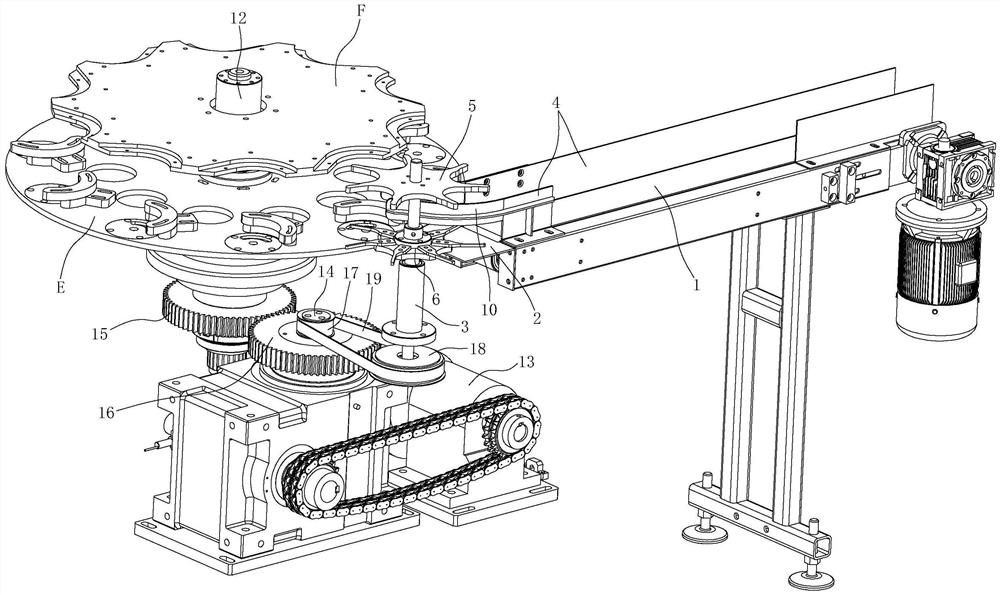
图2是图1的放大结构图;
图3是全自动瓶装机去掉称量加料装置后的立体结构图;
图4是图3的放大结构图;
图5是本发明两转盘与上外齿轮和下外齿轮联动结构的立体结构图之一;
图6是本发明两转盘与上外齿轮和下外齿轮联动结构的立体结构图之二;
图7是本发明中瓶子传送带与上外齿轮和下外齿轮的装配结构图。
具体实施方式:
下面结合附图对本技术作进一步说明。
本实施例的全自动固液混合食品瓶装机的送瓶装置,送瓶装置G设置在双转盘的旁边,沿双转盘圆周方向上依次设置有称量加料装置A、注液头B、压实装置C和脱离装置D,称量加料装置A负责添加固体食品,注液头B负责灌注浸泡液,压实装置C负责把瓶子内的固体食品压实,脱离装置D是负责把压实后的瓶子送离转盘。为了保证在下转盘E上的瓶子固定在下转盘E上,在上转盘F上专门设置了压瓶装置F1。本送瓶装置G是位于称量加料装置A的前方,它包括有瓶子传送带1、过渡板2和送瓶转动轴3,瓶子传送带1的两侧设置有限位板4,限位板4的作用是限制瓶子a只能在瓶子传送带1上移动,传送过程瓶子a不会离开瓶子传送带1,在瓶子传送带1的传送方向末端设置有过渡板2,送瓶转动轴3设置在过渡板2末端并形成竖立设置,在送瓶转动轴3上套装有上外齿轮5和下外齿轮6,上外齿轮5的第一内凹齿口7造型与瓶子上部瓶身外形相匹配,下外齿轮6的第二内凹齿口8造型与瓶子下部瓶身外形相匹配,上外齿轮5和下外齿轮6的高度位置分别对应瓶子上部和下部,在送瓶转动轴3转动时,会带动上外齿轮5和下外齿轮6一起同步转动,当瓶子a被瓶子传送带1传送至过渡板2时,最前方的瓶子的上部会被上外齿轮5的第一内凹齿口7叉住,瓶子下部会被下外齿轮6的第二内凹齿口8叉住,然后随着上外齿轮5和下外齿轮6的转动,瓶子a会被推送到双转盘的下转盘E上。在上外齿轮5和下外齿轮6之间设置有内弧形引导片9和外弧形引导片10,内弧形引导片9和外弧形引导片10之间形成的通道接驳两限位板4之间形成的通道,使瓶子a从瓶子传送带1被传送过渡到内弧形引导片9和外弧形引导片10之间的通道内,转为由内弧形引导片9和外弧形引导片10一起引导转移瓶子a,内弧形引导片9和外弧形引导片10的弧形状是从瓶子传送带1朝转盘方向转向,在外弧形引导片10的末端都成型有导入片11,导入片11导入方向与两转盘圆周转动方向相同。转盘转动轴12与送瓶转动轴3之间通过机械传动实现联动,具体地说,在驱动电机13的减速箱主轴14上套装有主动齿轮15和主动皮带轮17,在转盘转动轴12上设置有从动齿轮16,主动齿轮15与从动齿轮16相互啮合传动,在送瓶转动轴3上套装有从动皮带轮18,主动皮带轮17与从动皮带轮18之间通过传动带19连接传动,在上述结构下,通过驱动电机13的驱动,使减速箱主轴14同时带动转盘转动轴12和送瓶转动轴3同时转动,使转盘转动轴12与送瓶转动轴3实现联动。
本装置的技术原理是,驱动电机13驱使两转盘与上外齿轮5和下外齿轮6一起联动式转动,两转盘的转动负责圆周步进式转动,使下转盘E园周边缘上的多个瓶子位按序到达本送瓶装置处,而送瓶转动轴3上的上外齿轮5和下外齿轮6的转动会把瓶子a从过渡板2转送到下转盘E上的瓶子位。这种联动方式误差非常少,不需要经常调机,提高生产效率。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围情况下,都可利用上述揭示的方法和技术内容对本发明技术方案作出许多可能的变动和修饰,或修改为等同变化的等效实施例。故凡是未脱离本发明技术方案的内容,依据本发明之形状、构造及原理所作的等效变化,均应涵盖于本发明的保护范围内。