一种三维点云中多中几何基元自动识别方法
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及计算机视觉的三维感知和机器人导航技术领域,具体为一种三维点云中多中几何基元自动识别方法。
背景技术
近年来,计算机视觉研究蓬勃发展,研究者们不断创造出开创性的算法理论,设计出崭新的产品技术,从而赋予了机器越来越接近人类的视觉能力,给人们的生活和工作带来了翻天覆地的变化。特别是高性能的摄像摄影设备的普及、计算机运算速度飞速提升以及具有学习能力的算法理论的突破,使得计算机视觉在机器人、安防监控、工业生产、游戏娱乐和医学影像等各个领域发挥了重要作用。RGB-D这一高性能摄影设备是新近出现的新产品、新技术的代表之一。它可以便捷的同时获取到彩色(RGB)和深度(D)信息,突破了原有的普通摄像机和激光扫描仪只能采集彩色或深度一种信息的局限。这类设备的出现和快速发展,使得以光学方式获取3D数据变得方便快捷、成本低廉。但随之出现了一个挑战性问题:如何利用计算机自动分析、感知采集到的庞大的3D数据。从3D点云中自动检测几何特征识别平面、球面和柱面等几何基元,是计算机感知世界的一个基础性问题。解决该问题可以降低计算机感知环境的难度,缩小高层语义和底层视觉特征之间的语义鸿沟,有助于使计算机像人一样来分析和感知世界,实现智能操作。因此,提出一种多几何基元的识别方法。目前的识别方法原理复杂,识别精确度低,因此,有必要进行改进。
发明内容
本发明的目的在于提供一种三维点云中多中几何基元自动识别方法,以解决上述背景技术中提出的问题。
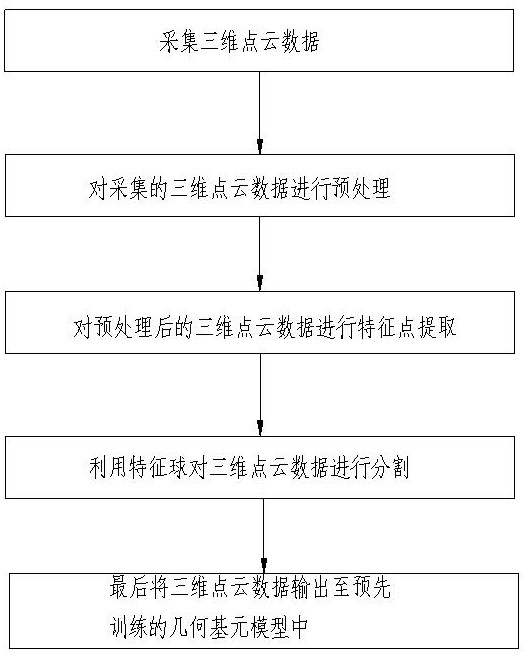
为实现上述目的,本发明提供如下技术方案:一种三维点云中多中几何基元自动识别方法,包括以下步骤:
A、采集三维点云数据;
B、对采集的三维点云数据进行预处理;
C、对预处理后的三维点云数据进行特征点提取;
D、利用特征球对三维点云数据进行分割;
E、最后将三维点云数据输出至预先训练的几何基元模型中。
优选的,本申请提供的一种三维点云中多中几何基元自动识别方法,其中,所述步骤B中三维点云数据进行预处理具体为:对三维点云数据进行统计滤波、点云区域生长处理和体素滤波。
优选的,本申请提供的一种三维点云中多中几何基元自动识别方法,其中,所述步骤C中特征点提取方法如下:
a、获取多组三维点云数据,其中,每组数据包括分别与预定个数据属性相应的数据元素;
b、确定所述预定个数据属性中用于提取特征数据的关键数据属性;
c、根据关键数据属性的数据元素值域和特征数据的关键数据元素的取值范围来建立模板向量,其中,关键数据元素是指特征数据中与关键数据属性相应的数据元素;同时生成数据样本;
d、对数据样本进行数据清洗;
e、最后通过将建立的模板向量应用于所述多组数据中与关键数据属性相应的数据元素来提取特征数据。
优选的,本申请提供的一种三维点云中多中几何基元自动识别方法,其中,所述步骤D中具体方法为:
a、首先,用 Mean-Shift 聚类算法在外层球上,对所有面性点的法向量的顶点进行聚类,进而可将面性点的法向量分为若干类,得到面性片段;
b、用 Mean-Shift 聚类算法在中层球上,对所有线性点的切向量的顶点进行聚类,进而可将线性点的切向量分为若干类,得到线性片段;
c、利用 K-means 聚类算法对所有的点性点进行聚类,将它们分割为一些空间位置独立的点性片段;
d、最后将面性片段、线性片段、点性片段通过训练点云样本,利用 Max-margin 方法对条件随机场模型进行学习,并获得模型的所有参数。
优选的,本申请提供的一种三维点云中多中几何基元自动识别方法,其中,所述步骤E中输出多个几何基元模型,并在在多个候选几何模型中确定出最优模型。
与现有技术相比,本发明的有益效果是:本发明采用的识别方法操作简单,自动化程度高,精确度高,大大提高了对三维点云的识别与分析能力;其中,采用的特征点提取方法可快速地从大量数据中提取特征数据,而不必进行大量的逻辑判断,从而能够有效地提高提取特征数据的效率,节省提取特征数据的时间;三维点云数据进行分割方法将三维点云按照邻域结构分为点、线和面三大类,进一步提高了识别精度。
附图说明
图1为本发明流程图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1,本发明提供如下技术方案:一种三维点云中多中几何基元自动识别方法,包括以下步骤:
A、采集三维点云数据;
B、对采集的三维点云数据进行预处理;
C、对预处理后的三维点云数据进行特征点提取;
D、利用特征球对三维点云数据进行分割;
E、最后将三维点云数据输出至预先训练的几何基元模型中。
本发明中,步骤B中三维点云数据进行预处理具体为:对三维点云数据进行统计滤波、点云区域生长处理和体素滤波。
本发明中,所述步骤C中特征点提取方法如下:
a、获取多组三维点云数据,其中,每组数据包括分别与预定个数据属性相应的数据元素;
b、确定所述预定个数据属性中用于提取特征数据的关键数据属性;
c、根据关键数据属性的数据元素值域和特征数据的关键数据元素的取值范围来建立模板向量,其中,关键数据元素是指特征数据中与关键数据属性相应的数据元素;同时生成数据样本;
d、对数据样本进行数据清洗;
e、最后通过将建立的模板向量应用于所述多组数据中与关键数据属性相应的数据元素来提取特征数据。
本发明中,所述步骤D中具体方法为:
a、首先,用 Mean-Shift 聚类算法在外层球上,对所有面性点的法向量的顶点进行聚类,进而可将面性点的法向量分为若干类,得到面性片段;
b、用 Mean-Shift 聚类算法在中层球上,对所有线性点的切向量的顶点进行聚类,进而可将线性点的切向量分为若干类,得到线性片段;
c、利用 K-means 聚类算法对所有的点性点进行聚类,将它们分割为一些空间位置独立的点性片段;
d、最后将面性片段、线性片段、点性片段通过训练点云样本,利用 Max-margin 方法对条件随机场模型进行学习,并获得模型的所有参数。
本发明中,所述步骤E中输出多个几何基元模型,并在在多个候选几何模型中确定出最优模型。
综上所述,本发明采用的识别方法操作简单,自动化程度高,精确度高,大大提高了对三维点云的识别与分析能力;其中,采用的特征点提取方法可快速地从大量数据中提取特征数据,而不必进行大量的逻辑判断,从而能够有效地提高提取特征数据的效率,节省提取特征数据的时间;三维点云数据进行分割方法将三维点云按照邻域结构分为点、线和面三大类,进一步提高了识别精度。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
- 一种三维点云中多中几何基元自动识别方法
- 一种三维点云中多种几何基元自动识别方法