基于人脸识别的车辆安全报警系统
文献发布时间:2023-06-19 13:46:35
技术领域
本发明属于车载人脸识别设备技术领域,具体涉及一种基于人脸识别的车辆安全报警系统。
背景技术
目前,随着经济的不断发展,各种汽车成为人们日常出行的最主要的交通工具,另一方面,随着全球范围内车辆保有量的增加,交通事故数量的急速增长已经成为一个严峻的社会问题。据相关数据统计,每年交通事故中有约三分之一的人员伤亡是疲劳驾驶造成的。国家统计局数据显示,我国近五年来每年交通事故发生次数均超过12万起,其中货车交通事故尤为严重,货车事故率高于普通机动车辆,且造成的损失也高于平均水平。其中,因为疲劳驾驶造成的交通运输事故每年给人民生命财产安全造成重大损失,各种研究表明,在所有道路事故中,约有20%与疲劳有关,在某些道路上高达50%。
由于司机长时间驾驶或睡眠不足引发的瞌睡和困倦,许多国家都有数据表明驾驶疲劳是引发恶性交通事故的重要原因之一;驾驶员疲劳已经和酒后驾驶一样,成为交通事故的主要隐患,所不同的是,酒后驾驶很容易被检测出来,而驾驶疲劳则具有一定的隐蔽性。驾驶疲劳是指短暂且无意识的注意力丧失,通常表现为眼神茫然空洞以及频繁且无意识地合上双眼等特征。现有的疲劳驾驶检测大多是针对驾驶员人脸眼部特征、异常行为的检测,结合机器学习的方法做出判断,由于此类方法的疲劳驾驶检测需要采集大量数据,且不同的驾驶员各种驾驶习惯有较大偏差,因此此类程序在实时性与准确性上仍需要改进。
随着智能传感器、智能模式识别和汽车电子技术以及车辆动力学技术的高度发展,疲劳驾驶检测装置与技术成为近年来国内外交通安全领域的研究热点。通过对驾驶员疲劳状态的检测,可以大大减少疲劳驾驶引起的交通事故。特别是对于从事长途客运、货运等业务运营的驾驶员,由于职业要求,经常有长期连续驾驶,驾驶时很难保持高警戒状态的情况;因此实时检测疲劳状态更为重要。现有疲劳驾驶检测装置如公开号为109902663 A的一种疲劳驾驶预警方法及装置,包括步骤S1、实时获取驾驶人员的深度图像数据和彩色图像数据;步骤S2、基于所述彩色图像数据,识别所述驾驶人员的人脸关键信息;步骤S3、基于所述深度图像数据,识别所述驾驶人员的身体姿态信息;步骤S4、根据所述人脸关键信息和所述身体姿态信息,确定所述驾驶人员是否存在疲劳驾驶。这类技术是基于视觉特征的疲劳驾驶检测装置及方法,其技术手段是运用计算机视觉技术提取驾驶员的视觉特征信息进行疲劳判断,视觉特征受到光照的影响较大,转弯、变线又会对基于车辆行为的检测产生较大影响,导致其准确性、可靠性和实用性不高。
公开号为111422206 A的一种展车模式下异常驾驶状态的预警模拟方法、系统、存储介质及汽车,所述方法包括:在车辆处于展车模式下,响应于输入的模拟行车指令将车载系统进入模拟行车状态;在所述模拟行车状态下,实时拍摄位于主驾位置的用户的模拟影像及获取模拟行车监测数据,并发送至车载系统界面上进行显示;通过所述模拟影像监测位于主驾位置的用户的异常驾驶状态,对所述异常驾驶状态对应的异常模拟影像上进行标注;将所述标注的异常模拟影像及其对应的模拟行车监测数据在车载系统界面上进行展示。这一类方案是基于汽车行驶状态的疲劳驾驶检测装置及方法,其技术手段是利用车载传感器检测车辆本身的速度、侧向加速度、横向位移量、车道偏离和车辆行驶轨迹的变化等特征来推测驾驶人的疲劳状态。然而,由于受到车辆的具体型号、道路的具体状况和驾驶员个人驾驶习惯、驾驶经验和驾驶条件的限制,这类疲劳驾驶检测方法的准确性有待进一步提高。
公开号为CN 106408874 A的疲劳驾驶的提醒系统中,信息站采集待提醒驾驶员在驾驶过程中的动作信息及待提醒驾驶员的心率曲线,并将动作信息及心率曲线发送至通信终端。通信终端接收动作信息及心率曲线,并将动作信息及心率曲线发送至服务器。服务器接收动作信息及心率曲线,并根据动作信息、心率曲线、平均能量及事故心率曲线,判断待提醒驾驶员是否疲劳,若是,服务器发送报警信号至通信终端该方法是非目前较可靠的疲劳驾驶检测。这类技术是基于驾驶员生理特征的疲劳驾驶检测装置及方法,其技术手段是利用一些生理指标传感器来判断驾驶员是否进入疲劳状态。因为相关研究表明,人体在疲劳状态下,生理反应会变得迟钝,即人体生理信号的响应会出现延迟,指标也会偏离正常的状态。
目前现有用以人脸识别检测技术或驾驶员生理指标检测技术普遍存在的技术问题:1)人本自身生理指标信号比较微弱,而驾驶员行车过程中由运动和环境噪音对信号采集的干扰导致疲劳驾驶检测精度不高;2)现有基于生理特征的疲劳驾驶检测装置大多采用智能手环,利用多种传感器(如皮肤温度传感器、心率传感器和光电容积描记传感器等)多种生物信号进行疲劳驾驶状态检测,但仍然不能监测脑电和眼动功能,其灵敏度和特异度依然不够理想;3)现有基于生理特征的疲劳驾驶检测方法大多采用预设比较阈值的方式进行判断(如心率小于某个设置阈值就判定为疲劳驾驶),而驾驶员个体身体状况的差异性使得阈值比较方法不具有普适性;4)现有应用于疲劳驾驶设备普遍以摄像头采集为主,导致图像处理信息量过大,耗能和存储空间需求高等问题,以及要求配置设备的处理性能较高和成本高的问题。由于疲劳状态为极限状态和偶发事件,采用实时摄像和图像处理会使设备的大部分时间处于无效启动运行阶段,不仅资源浪费,而且影响设备使用寿命。
发明内容
针对现有应用于疲劳驾驶设备普遍以摄像头采集为主,导致图像处理信息量过大,耗能和存储空间需求高等问题,以及针对现有疲劳驾驶预警设备存在敏感性强,容易给驾驶员带来特殊干扰等问题进行改进,本发明提供一种基于人脸识别的车辆安全报警系统。
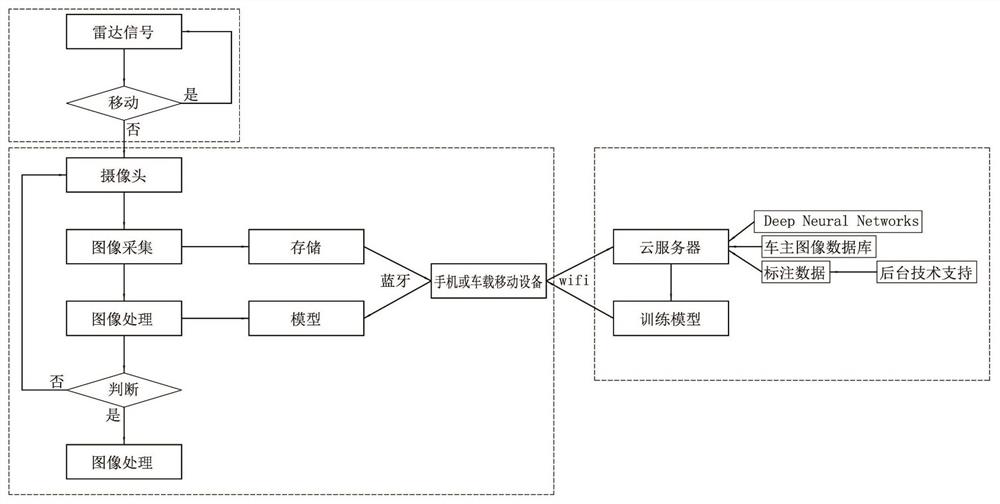
本发明解决其技术问题所采用的方案是:一种基于人脸识别的车辆安全报警系统,该系统包括雷达检测单元,摄像头采集及图像处理模块,蓝牙模块,手机或车载电子通讯设备,预警设备和云服务器,雷达检测单元包括支架、电源模块、雷达模块(G微动作雷达感应模块)和无线发送模块,雷达设备通过支架固定在车内合适位置,并将雷达探头部分对照驾驶室区域,可个至多个雷达模块。摄像头采集单元包括支架、摄像头、蓝牙模块和处理器,通过雷达检测单元作为预警监测,在满足雷达预警条件时启动拍照程序进行拍照,对采集的驾驶员状态图像数据,不仅要对图像处理,而且需要参与大数据学习,由于所采集图像数据是在必要条件下获取的数据,所以这些图像数据特征与困倦特征匹配程度高,图像数据量较少且集中,处理量较小;拍照图像与手机蓝牙传输,由手机将图像信息发送至后台云服务器,进行大数据分析,分析结果实时传递至手机APP,由手机发出报警信号,摄像头采集单元用以对图像详细监测,仅对特殊图像进行无线发送,对采集的图像,行驶时仅发送特征图像,减少数据传输流量,提高反馈速度,在WIFI环境下大量传输,与云服务器平台建立关系,通过云服务器平台进行深度学习和对标注数据的训练,将训练模型反馈至手机APP或车载设备,手机或车载设备在无wifi环境下利用前期训练模型作为驾驶员图像数据处理比对依据,在wifi环境利用云服务器平台进行特定驾驶员包括面部特征等深度学习,以及通过后台技术人员对图像数据特征进行标注,以强化学习。后台给出经验E的有限个典型模型,进行强化学习随机获取,或在特殊时刻获取的未标注的大量图像数据,在网络环境上传至云平台,由云平台根据已人为标注过其他人图像的大数据样本,自动对新上传图像进行标注,并下载至车载机端,用作进行现场直接比对的模型样本。
雷达检测单元与摄像头采集单元通过有线或无线方式建立信号传输关系,雷达检测单元仅需将摄像头采集单元提供启动时机,使得雷达检测单元与摄像头采集单元能够被分别置于于车内不同部位。
所述的摄像头采集单元将图像信息通过蓝牙发送至手机或车载移动电子设备的APP端,使相应图像数据得到存储,通过手机或车载移动电子设备的APP端与云服务器平台建立连接,实现大数据上传和训练模型的下载,以及通过手机或车载移动电子设备将相应模型数据传输至摄像头采集单元以便于进行车辆行驶状态下的检测与判断。
警示装置通过手机警示或者通过坐垫或手环进行震动或电脉冲方式对驾驶员进行警示。
在驾驶员处于静止状态t时且在驾驶车辆累计t时,摄像头通过捕捉驾驶员面部详细状态信息,并对图像进行处理,以确定驾驶员是否处于疲倦或睡眠状态。
自控雷达设备包括基座、万向调节座、滤波罩和雷达设备,以及显示设备,雷达设备用以获取驾驶员动作变化信息,扑捉的动作信息时并部触发摄像头采集单元,但在t时间内无动作信息,雷达设备才触发摄像头采集单元开始配合工作,首先调整雷达设备探头方向,使其朝向驾驶员,其次是通过滤波罩将驾驶员之外区域屏蔽掉,仅对驾驶员范围进行信号扑捉,最后还需根据驾驶员体位,通过万向调节座自适应调节跟踪驾驶员,使雷达设备仅用于自动跟踪检测驾驶员附近区域。
所述的万向调节座包括第一板层、第二板层和第三板层,第一板层与第二板层之间的右端部固定有左右向弹片,第二板层与第三板层之间的后端部固定有前后向弹片,从而,第一板层与第二板层之间能够相对左右转动,第二板层与第三板层之间能够相对前后转动,这种左右和前后转动的组合,使得第一板层与第三板层之间能够在一定范围内前后左右转动到合适位置;在第一板层的外端固定有左右调节电机,该电机的转轴上连接有调节螺钉,调节螺钉连接于第二板层上对应的螺孔内。在第一板层的外端同排除还固定有前后调节电机,该电机的转轴上连接有调节螺钉,调节螺钉贯穿第二板层上设置的贯穿孔后,又连接于第三板层上对应的螺孔内,分别控制左右调节电机转动和前后调节电机转动,能够实现上述的第一板层与第二板层相对左右转动,第二板层与第三板层相对前后转动,控制器根据雷达设备反馈信号,自动控制上述两电机转动程度,进而自动控制使第一板层与第三板层之间能够在一定范围内前后左右转动到合适位置,雷达设备安装于第三板层的中心,滤波罩套装在雷达设备的外侧。
设置滤波罩为可轴向伸缩调节结构,在第三板层外端固定有支座,该支座包括一个固定套管,该固定套管内套装有伸缩滤波罩,同排除在固定套管内侧设置有轴向限位块,在伸缩滤波罩外侧设置螺纹,同排除在螺纹上沿轴向凹陷有轴向卡槽,轴向限位块嵌入所述轴向卡槽内,在所述固定套管外侧套装有能够转动的调节套,调节套同排除套装与所述伸缩滤波罩外侧,调节套与伸缩滤波罩之间螺纹连接,转动调节套能够驱动伸缩滤波罩沿轴向伸缩。
在位于第三板层的中心设置有穿孔并安装有所述雷达设备,在雷达发射接收探头的后端安装座上设置有动卡座,在所述穿孔位置固定有静卡座,动卡座与静卡座之间的对接面有锯齿状凸凹衔接结构,所述的动卡座中心连接的套管贯穿于所述穿孔后,有安装有碟簧,使得动卡座与静卡座之间具有弹性压紧关系,转动雷达设备能够改变其角位。雷达设备的电源及信号线从所述套管引出后连接电路板,本实施将电路板固定与板层之间或者固定与基座内。
在连接座与底座之间通过转轴连接,从而连接座相对于底座能够转动,同排除在连接座与底座之间分别通过销轴铰接有调节臂,两调节臂的末端通过锁销固定,使得连接座相对于底座具有一个倾斜角度。
本发明的有益效果:
该系统解决现有应用于疲劳驾驶设备普遍以摄像头采集为主,导致图像处理信息量过大,耗能和存储空间需求高等问题,能够降低设备配置要求以降低成本。该系统在大部分时间处于摄像头无启动运行阶段,降低能耗和节约空间资源,提高设备使用寿命。
由于雷达检测单元仅需将摄像头采集单元提供启动时机,所以优选通过蓝牙建立通讯,使得雷达检测单元与摄像头采集单元能够被分别置于于车内不同部位。不同于摄像头采集单元必须用以采集驾驶员面部特征,雷达检测单元可被置于例如驾驶员右侧、前侧、后侧、顶部、左侧或被隐藏区域均可。从而雷达检测单元的布置方式更加灵活多样。
对采集的驾驶员状态图像数据,不仅要对图像处理,而且需要参与大数据学习,由于所采集图像数据是在必要条件下获取的数据,所以这些图像数据特征与困倦特征匹配程度高,且图像数据量较少且集中,所以处理量较小。在WIFI环境下大量传输,行程时仅发送特征图像,减少数据传输流量,提高反馈速度,该系统需要与云服务器平台建立关系,通过云服务器平台进行深度学习和对标注数据的训练,将训练模型反馈至车载设备,车载设备在无wifi环境下利用前期训练模型作为驾驶员图像数据处理比对依据,在wifi环境利用云服务器平台进行特定驾驶员包括面部特征等深度学习,以及通过后台技术人员对图像数据特征进行标注,以强化学习。
该设备仅在必要的条件下才进行摄像和图像处理工作。绝大部分时间,驾驶员处于非疲劳状态下,仅由耗能较低且运行成本较低的雷达设备进行监控作业。触发摄像头启动工作和图像处理的条件可通过设置敏感度来控制,但雷达主要用以检测人体运动状态,即雷达获取驾驶员(非其他乘坐人员)头颈运动状态、手臂运动状态、身体运动状态等,用以确定驾驶员处于清醒状态。以上为摄像头采集单元介入时机的选择特点,使得摄像头采集单元介入后所或驱动的图像信息与困倦特征关联性较强,排除大量无关联的图像信息,从而大量简化图像处理的信息量和成本。
对于所采集的关联程度较高的驾驶员状态图像数据,还进一步需要参与大数据学习,这种通过雷达模块初步筛选的与困倦关联度高的特征数据,能够简化对大数据特征标注难度,以及提高数据训练精度。
该系统避免因实时后台通讯导致的信息处理速度慢,反馈结果延迟等弊端,通过获取训练模型,在不予后台直接通讯的情况下进行图像处理能够显著减少数据传输流量和提高反馈速度,实现轻量化人工智能图像处理的效果。该系统与云服务器平台建立关系的时机可以在非驾驶状态的任何其他情形,通过云服务器平台进行深度学习和对标注数据的训练,将训练模型反馈至车载设备,以及通过后台技术人员对图像数据特征进行标注,以强化学习。
采用自控雷达设备,首先调整雷达设备探头方向,使其朝向驾驶员,其次是通过滤波罩将驾驶员之外区域屏蔽掉,仅对驾驶员范围进行信号扑捉,最后还需根据驾驶员体位,通过万向调节座自适应调节跟踪驾驶员,使雷达设备仅用于自动跟踪检测驾驶员附近区域。雷达设备能够独立运行,控制器根据雷达设备实时反馈信号,控制左右调节电机转动和前后调节电机转动,使得雷达设备的朝向能够随驾驶员体位而自适应改变和定位,从而能够获得仅有驾驶员的动作信息。
将万向螺钉轴应用于万向调节座时能够提供第一板层、第二板层和第三板层具有更多的转动功能,从而相对于实施例能够提高转动范围,使得该雷达检测设备能够被放置于更加接近驾驶员位置。
警示装置为手环式,与两侧导电凸块对应位置的手环上分别固定有电磁体,电磁体的内端设置有嵌槽用以安置相应的导电凸块,使其自然状态下并不外露,以提高佩戴的舒适性。启动脉冲电路和电磁体,电磁体导电后提供给永磁体一个排斥力,该排斥力能够迫使所述内弹片向内弹出,两端内弹片同时弹出后,能够使得两侧的铜片导体分别接触手臂上的肌肉皮层,脉冲电路发出脉冲电流,刺激手臂进而唤醒睡眠的驾驶者。驾驶者清醒后,雷达设备检测驾驶者动作信号后判断其处于情形状态,向摄像头采集单元或来自于手机端发射相应的停止信号,手环处理器不再提供脉冲电流。
附图说明
图1是本发明系统框图。
图2是本发明系统流程图。
图3是自控雷达设备侧视图。
图4是图3的局部剖面结构示意图。
图5是图3的剖面结构示意图。
图6是图3的立体图。
图7是图6中万向调节座示意图。
图8是另一种万向调节座示意图。
图9是万向螺钉轴的侧视图。
图10是万向螺钉轴的装配示意图。
图11是固定底座结构图。
图12是可调角度底座结构图。
图13是卡座结构图。
图14是电脉冲手环结构图。
图15是图14的控制框图。
图中标号:基座1,万向调节座2,滤波罩3,雷达设备4,第一板层5,第二板层6,第三板层7,左右向弹片8,前后向弹片9,左右调节电机10,前后调节电机11,万向节12,螺钉13,轴段14,支座15,伸缩滤波罩16,轴向限位块17,轴向卡槽18,调节套19,安装座20,动卡座21,套管22,碟簧23,静卡座24,电路板25,信号线26,连接座27,底座28,调节臂29,锁销30,支架31,卡环32,锁丝33,粘贴层34,转轴35,销轴36,手环37,电源显示屏模块38,电磁体39,内弹片40,导电凸块41,贯穿孔42,螺套43,转向电机44,轴承45。
具体实施方式
下面结合附图和实施例对本发明进一步说明。
实施例1:一种基于人脸识别的车辆安全报警系统,如图1所示,该系统主要包括雷达检测单元,摄像头采集及图像处理设备,蓝牙模块,手机或车载电子通讯设备,预警模块和云服务器等。主要解决现有应用于疲劳驾驶设备普遍以摄像头采集为主,导致图像处理信息量过大,耗能和存储空间需求高等问题,以及要求配置设备的处理性能较高和成本高的问题。由于疲劳状态为极限状态和偶发事件,采用实时摄像和图像处理会使设备的大部分时间处于无效启动运行阶段,不仅资源浪费,而且影响设备使用寿命。本实施例同时针对现有疲劳驾驶预警设备存在敏感性强,容易给驾驶员带来特殊干扰等问题进行改进。
该系统中的雷达检测单元包括支架、独立电源或车载电源、雷达设备、无线发送模块例如蓝牙。雷达设备通过支架固定在车内合适位置,并将雷达探头部分对照驾驶室区域,一套雷达设备可实现该功能,不排除使用多个雷达设备的情况,例如可采用前雷达和侧雷达配合。雷达检测单元与摄像头采集单元通过有线或无线方式建立信号传输关系,由于雷达检测单元仅需将摄像头采集单元提供启动时机,所以优选通过蓝牙建立通讯,使得雷达检测单元与摄像头采集单元能够被分别置于于车内不同部位。不同于摄像头采集单元必须用以采集驾驶员面部特征,雷达检测单元可被置于例如驾驶员右侧、前侧、后侧、顶部、左侧或被隐藏区域均可。从而雷达检测单元的布置方式更加灵活多样。
摄像头采集单元包括支架、单目或双目摄像头、蓝牙模块和处理器等。用以对采集的图像进行处理和监测,但仅对特殊图像进行无线发送。
需要说明的是,摄像头采集单元必要性1:对采集的驾驶员状态图像数据,不仅要对图像处理,而且需要参与大数据学习,由于所采集图像数据是在必要条件下获取的数据,所以这些图像数据特征与困倦特征匹配程度高,且图像数据量较少且集中,所以处理量较小。必要性2:在WIFI环境下大量传输,行程时仅发送特征图像,减少数据传输流量,提高反馈速度,该系统需要与云服务器平台建立关系,通过云服务器平台进行深度学习和对标注数据的训练,将训练模型反馈至车载设备,车载设备在无wifi环境下利用前期训练模型作为驾驶员图像数据处理比对依据,在wifi环境利用云服务器平台进行特定驾驶员包括面部特征等深度学习,以及通过后台技术人员对图像数据特征进行标注,以强化学习。
关于雷达检测单元和摄像头采集单元的支架,可以采用现有任何形式的固定支架或调节支架,本实施例不详述。
手机或车载移动电子设备,所述的摄像头采集单元将图像信息通过蓝牙发送至手机或车载移动电子设备的APP端,使相应图像数据得到存储,通过手机或车载移动电子设备的APP端与云服务器平台建立连接,实现大数据上传和训练模型的下载。以及通过手机或车载移动电子设备将相应模型数据传输至摄像头采集单元以便于进行车辆行驶状态下的检测与判断。
警示装置可以通过手机警示,或者通过特殊设计的特殊的坐垫或手环进行如震动或电脉冲方式对驾驶员进行警示。
通过雷达作为预警监测,在满足条件时启动拍照程序进行拍照,拍照图像与手机蓝牙传输,由手机将图像信息发送至后台云服务器,进行大数据分析,分析结果实时传递至手机,由手机发出报警信号。
关于摄像头采集单元的图像处理,通过摄像头采集单元来对驾驶员当前状态拍摄一段视频,将视频通过基于Python的OpenCV代码解码成若干张图片,按照4:1的比例分为驾驶员某困倦的训练集和测试集,其中80%为驾驶员某困倦的训练集存储和20%为驾驶员某困倦的测试集用以判断检测。根据历史云服务器平台人工对数据标注软件LabelImg在数据集上标注待测困倦图像数据。将数据集利用2080Ti上的GPU在Yolov4-tiny模型上进行训练,通过通道修剪算法修剪训练后的Yolo-V4tiny困倦图像数据模型中的冗余通道和权重参数,将上述得到的权重参数应用于Yolov4-tiny模型中用来检测人脸识别和困倦程度。
关于云服务器平台的大数据深度强化学习和模型训练,后台给出经验E的有限个典型模型,进行强化学习,随机获取,或在特殊时刻获取的未标注的大量图像数据,在网络环境上传至云平台,由云平台根据已人为标注过其他人图像的大数据样本,自动对新上传图像进行标注,并下载至车载机端,用作进行现场直接比对的模型样本。摄像头采集单元将上述得到的模型样本权重参数应用于Yolov4-tiny模型中用来检测实时图像中驾驶员面部区域矩形框并将框的颜色显示成白色。之后利用图像二值化的特性通过将阈值设置为白色对应的灰度值对数据标注后的实时图像进行图像二值化以保留白色的待检测区域矩形框,滤除除白色外的冗余背景以减少后续检测出冗余的角点,最后利用矩形顶点特征的Harris算法检测出四个角点得到像素坐标。将优化后的立体标定参数和待测图像的像素坐标结合SGBM立体匹配算法进行困倦判断以得到困倦图像结论。
该设备仅在必要的条件下才进行摄像和图像处理工作。绝大部分时间,驾驶员处于非疲劳状态下,仅由耗能较低且运行成本较低的雷达设备进行监控作业。触发摄像头启动工作和图像处理的条件可通过设置敏感度来控制,但雷达主要用以检测人体运动状态,即雷达获取驾驶员(非其他乘坐人员)头颈运动状态、手臂运动状态、身体运动状态等,用以确定驾驶员处于清醒状态。仅在驾驶员处于静止状态t1时且在驾驶车辆累计t2时,摄像头通过捕捉驾驶员面部详细信息来获取例如是否闭眼,是否对话等必要的状态信息,并对图像进行处理,以确定驾驶员是否处于疲倦或睡眠状态。以上为摄像头采集单元介入时机的选择特点,使得摄像头采集单元介入后所或驱动的图像信息与困倦特征关联性较强,排除大量无关联的图像信息,从而大量简化图像处理的信息量和成本。
对于所采集的关联程度较高的驾驶员状态图像数据,还进一步需要参与大数据学习,这种通过雷达模块初步筛选的与困倦关联度高的特征数据,能够简化对大数据特征标注难度,以及提高数据训练精度。
该系统避免因实时后台通讯导致的信息处理速度慢,反馈结果延迟等弊端,通过获取训练模型,在不予后台直接通讯的情况下进行图像处理能够显著减少数据传输流量和提高反馈速度,实现轻量化人工智能图像处理的效果。该系统与云服务器平台建立关系的时机可以在非驾驶状态的任何其他情形,通过云服务器平台进行深度学习和对标注数据的训练,将训练模型反馈至车载设备,以及通过后台技术人员对图像数据特征进行标注,以强化学习。
实施例2:一种适用于车辆安全报警系统的自控雷达设备,主要包括基座1、万向调节座2、滤波罩3和雷达设备4,以及显示设备等。该设备能够根据采集的雷达信号,自动调整雷达扑捉范围,从而获取准确的驾驶员动作信息,以及避免被其他动作信息干扰。可见,该雷达设备4主要用以获取驾驶员动作变化信息,雷达设备对该信息扑捉尤其敏感,如图2所示,雷达设备扑捉的动作信息时并部触发摄像头采集单元,但在t1时间内无动作信息,雷达设备才触发摄像头采集单元开始配合工作。普通雷达设备获取动作信息很容易被干扰,从而该系统中在采用普通雷达设备时,需要考虑排除干扰因素,尤其是在空间较小的车内环境,雷达设备扑捉驾驶员动作信息时,首先调整雷达设备探头方向,使其朝向驾驶员,其次是通过滤波罩3将驾驶员之外区域屏蔽掉,仅对驾驶员范围进行信号扑捉,最后还需根据驾驶员体位,通过万向调节座2自适应调节跟踪驾驶员,使雷达设备仅用于自动跟踪检测驾驶员附近区域。
具体地,所采用的万向调节座2包括第一板层5、第二板层6和第三板层7,如图4和图7所示,第一板层5与第二板层6之间的右端部固定有左右向弹片8,第二板层6与第三板层7之间的后端部固定有前后向弹片9。从而,第一板层5与第二板层6之间能够相对左右转动,第二板层6与第三板层7之间能够相对前后转动,这种左右和前后转动的组合,使得第一板层5与第三板层7之间能够在一定范围内前后左右转动到合适位置。
图3和图4可以看出,在第一板层5的外端固定有左右调节电机10,该电机的转轴上连接有调节螺钉,调节螺钉连接于第二板层6上对应的螺孔内。在第一板层5的外端同时还固定有前后调节电机11,该电机的转轴上连接有调节螺钉,调节螺钉贯穿第二板层6上设置的贯穿孔42后,又连接于第三板层7上对应的螺孔内。分别控制左右调节电机10转动和前后调节电机11转动,能够实现上述的第一板层5与第二板层6相对左右转动,第二板层6与第三板层7相对前后转动,控制器根据雷达设备反馈信号,自动控制上述两电机转动程度,进而自动控制使第一板层5与第三板层7之间能够在一定范围内前后左右转动到合适位置。
如图5所示,所述的雷达设备4安装于第三板层7的中心,滤波罩3套装在雷达设备4的外侧。
由以上结构和控制关系可以看出,本实施例雷达设备能够独立运行,控制器根据雷达设备实时反馈信号,控制左右调节电机10转动和前后调节电机11转动,使得雷达设备的朝向能够随驾驶员体位而自适应改变和定位,从而能够获得仅有驾驶员的动作信息。
实施例3:在实施例2基础上,分别在所述左右调节电机10和前后调节电机11的转轴上安装有万向螺钉轴。具体结构如图9或图10所示,这种左右调节电机10转动和前后调节电机11转动能够随相应的板层转动而自适应弯曲,但仍然能够传递扭力,使得其末端的螺钉13转动。图9中可以看出,万向螺钉轴包括位于首端的轴,14,位于中部的万向节12和位于末端的螺钉13。一种组合方式如图10所示,在万向节12的端部设置有异形孔如六棱状卡槽,在螺钉的端部设置有异形柱如六棱柱,两者匹配套装在一起,更换不同长度的螺钉13能够改变其传动距离。
将万向螺钉轴应用于万向调节座2时如图4所示,在本实施例中,这种结构能够提供第一板层5、第二板层6和第三板层7具有更多的转动功能,从而相对于实施例2能够提高转动范围,使得该雷达检测设备能够被放置于更加接近驾驶员位置。
实施例4:在实施例2或3基础上,设置滤波罩3为可轴向伸缩调节结构。如图5所示,一种调节方式是在第三板层7外端固定有支座15,该支座15包括一个固定套管,该固定套管内套装有伸缩滤波罩16,同时在固定套管内侧设置有轴向限位块17,在伸缩滤波罩16外侧设置螺纹,同时在螺纹上沿轴向凹陷有轴向卡槽18,轴向限位块17嵌入所述轴向卡槽18内。在所述固定套管外侧套装有能够转动的调节套19,调节套19同时套装与所述伸缩滤波罩16外侧,调节套19与伸缩滤波罩16之间螺纹连接,转动调节套19能够驱动伸缩滤波罩16沿轴向伸缩。
在位于第三板层7的中心设置有穿孔并安装有所述雷达设备4。具体地,考虑雷达设备具有发射和接收端,本实施例通过如图5所示的结构形式,能够改变发射接收的角位。如在雷达发射接收探头的后端安装座20上设置有动卡座21,在所述穿孔位置固定有静卡座24,动卡座21与静卡座24之间的对接面有锯齿状凸凹衔接结构,所述的动卡座21中心连接的套管22贯穿于所述穿孔后,有安装有碟簧23,使得动卡座21与静卡座24之间具有弹性压紧关系,转动雷达设备能够改变其角位。雷达设备的电源及信号线从所述套管22引出后连接电路板25,本实施将电路板25固定与板层之间或者固定与基座内。
实施例5:在以上各实施例基础上,所述基座被固定在连接座上,连接座被固定于车体内任何适当位置。图11、图12和图13分别提供了其中三种固定连接结构,如图11所示,基座1被固定与连接座27上,与连接座一体的底座28被粘贴或吸合固定于车体安装在前挡风玻璃中下偏低的位置,尽量不要遮挡影响到视线。如图12所示,在图11基础上在连接座27与底座28之间通过转轴35连接,从而连接座27相对于底座28能够转动,同时在连接座27与底座28之间分别通过销轴铰接有调节臂29,两调节臂29的末端通过锁销30固定,使得连接座27相对于底座28具有一个倾斜角度。如图13所示,采用卡接的方式,将该设备固定在空调出风口的排风口格栅位置上,或者套装在后视镜支座位置,如图中的一种结构形式是在连接座上固定有支座31,支架上安装有卡环32,两侧卡环32的端部贯穿有锁丝33,这种结构可被固定于副座椅靠背头枕下方杆件上。以及采用以上多种结构的组合形式。以及采用防滑垫配合粘贴层摆放在仪表台上较为平坦、靠前挡底下位置即可。
实施例6:在以上各实施例基础上,警示装置的一种结构形式如图14所示,该警示装置为手环式,包括手环37、电源显示屏模块38、电磁体39和内弹片40,手环37与电源显示屏模块38连接,自然状态下,位于电源显示屏模块38底部固定的内弹片40,被隐藏于手环37的凹槽内。从图中可以看出,内弹片40两侧对称,内弹片40的两外端各有一个导电凸块41,导电凸块41的前侧为铜片导体,后侧为永磁体,两者复合在一起被固定于内弹片端部,与铜片导体连接的电源线被包裹于内弹片并引入与脉冲电路的输出端连接。与两侧导电凸块41对应位置的手环上分别固定有电磁体39,电磁体的内端设置有嵌槽用以安置相应的导电凸块41,使其自然状态下并不外露,以提高佩戴的舒适性。
从图15可以看出,位于电源显示屏模块38内安置有电源、处理器和无线接收模块,处理器通过接收来自于摄像头采集单元或来自于手机端发射的警示信号,启动脉冲电路和电磁体,电磁体导电后提供给永磁体一个排斥力,该排斥力能够迫使所述内弹片向内弹出,两端内弹片同时弹出后,能够使得两侧的铜片导体分别接触手臂上的肌肉皮层,脉冲电路发出脉冲电流,刺激手臂进而唤醒睡眠的驾驶者。驾驶者清醒后,雷达设备检测驾驶者动作信号后判断其处于情形状态,向摄像头采集单元或来自于手机端发射相应的停止信号,手环处理器不再提供脉冲电流。
应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。不排除在相应的板层上设置贯穿孔后,又在贯穿孔内套固有如图4所示的螺套43,将所述万向螺钉轴的螺钉旋入该螺套内。关于实施例2的万向调节座2的另一种结构如图8所示,该万向调节座仅包括了第一板层5和第二板层6,以及在两者之间的右端部固定有左右向弹片8,同时在位于第二板层6的中心通过轴承45安装有转向电机44,转向电机44被固定在基座1上。且在第一板层5上安装有左右调节电机10,该左右调节电机10用以自动控制第一板层5和第二板层6之间的转动。从而当第一板层5和第二板层6转动后,再控制转向电机44转动,能够改变雷达设备的朝向。