一种自动拧取盖的冻存管灌封机及其操作方法
文献发布时间:2023-06-19 18:29:06
技术领域
本发明涉及灌封机结构技术领域,具体是一种自动拧取盖的冻存管灌封机及其操作方法。
背景技术
灌封机主要用于制药、化工行业,尤其是针对西林瓶或预充针灌装液进行灌装密闭封口。
目前市场上的灌封机大多是立式的,很少有台式冻存管机,而且现有技术的灌封机没有自动拧取盖功能,且工序中需要提前开盖,然后再上料灌装,之后再拧盖,该过程时间久且路径长,无形中提高了灌装过程中药液被污染的风险。
故此亟需开发一种自动拧取盖的冻存管灌封机及其操作方法来解决现有技术中的问题。
发明内容
本发明的目的在于提供一种自动拧取盖的冻存管灌封机及其操作方法,能够缩短灌装及拧盖时间和路径,降低灌装时包材内药液被污染的风险,同时多工位自动化灌装,提高了生产效率,结构简单,使用方便,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种自动拧取盖的冻存管灌封机,所述灌封机包括带有电控箱的拧盖灌装机以及与拧盖灌装机平行布置的轨道平台;所述轨道平台上设有放置包材的模具,所述轨道平台和拧盖灌装机均控制连接在电控箱上。本方案中灌封机带有智控的电控箱,用于控制灌封机的正常工作,其中拧盖灌装机用于完成拧盖和灌装动作。
作为本发明进一步的方案:所述拧盖灌装机包括拧松机械臂和拧紧机械臂,所述拧松机械臂和拧紧机械臂的转动方向相反。拧松机械臂用于对传送过来的模具上的包材进行盖子拧取下来,并将拧下来的盖子放置在模具的对应位置上;拧紧机械臂用于拾取模具对应位置上的盖子并拧紧到对应包材上。
作为本发明进一步的方案:所述拧松机械臂和拧紧机械臂均包括拧盖旋臂,所述拧盖旋臂通过旋转臂驱动安装在所述拧盖灌装机上,所述拧盖旋臂包括一对互为配接的夹爪,所述拧盖旋臂上设有驱动夹爪收合的驱动组件以及驱动夹爪旋转拧盖的旋转组件;所述夹爪上设有扭力传感器,且扭力传感器与电控箱电连接。夹爪的设置便于拧松机械臂或拧紧机械臂进行拧盖,扭力传感器的设置便于判断盖子是否拧松或拧紧。
作为本发明进一步的方案:所述驱动组件包括驱动电机,所述驱动电机通过推杆驱动连接在导向杆上,所述导向杆通过收拉滑块驱动连接在所述夹爪上。
作为本发明进一步的方案:所述导向杆与收拉滑块之间设有压紧弹簧,且压紧弹簧套接在所述导向杆上。
作为本发明进一步的方案:所述旋转组件包括与旋转臂驱动安装的同步轮,所述同步轮通过同步带驱动连接在推杆上。
作为本发明进一步的方案:位于拧松机械臂和拧紧机械臂之间的拧盖灌装机上还设有用于灌装的灌装针架,所述灌装针架伸缩式驱动在所述拧盖灌装机上。灌装针架设置在拧松机械臂和拧紧机械臂之间,不仅便于灌装前进行盖子拧松,灌装后进行盖子拧紧,且能够缩短灌装及拧盖时间和路径,降低灌装时包材内药液被污染的风险。
作为本发明进一步的方案:所述灌装针架通过蠕动泵连通连接在灌封机的药液桶上,所述蠕动泵安装在所述拧盖灌装机上。
作为本发明进一步的方案:所述模具上设有若干与包材对应的置盖槽。模具的前端用于排列放置包材,且后端设置置盖槽,便于拧松机械臂或拧紧机械臂进行工作。
一种冻存管灌封机的操作方法,所述方法包括如下步骤:
一:检查设备连接状态是否良好,以及在电控箱上设置生产所需的控制参数;
二:设备启动后,电控箱控制带包材的模具在轨道平台上滑动,用于包材的运送;
三:当包材输送到拧盖灌装机的拧松机械臂下方,电控箱先控制模具停止移动,然后控制拧松机械臂对包材盖子进行拧松操作,通过扭力传感器判断盖子是否拧松,若未拧松,则控制拧松机械臂继续拧动;若已拧松,则控制拧松机械臂移动,将拧下来的盖子放到模具上该包材对应的置盖槽后,电控箱控制拧松机械臂回到预设状态;
四:电控箱继续控制模具向前移动,当模具移动到灌装针架下方,控制模具停止移动,然后控制灌装针架上的灌装针移动到包材内,对包材进行药液灌装,当灌装到预设值后,电控箱控制灌装针架停止灌装并回到预设位置;
五:电控箱继续控制模具向前移动,当包材输送到拧紧机械臂下方时,电控箱先控制模具停止移动,然后控制拧紧机械臂移动,并拾取模具上对应置盖槽内的盖子,之后控制拧紧机械臂移动到包材上对包材进行盖子拧紧
操作,通过扭力传感器判断盖子是否拧紧,若未拧紧,则控制拧松机械臂继续拧动;若已拧紧,则控制拧松机械臂移动,并回到预设状态;
六:循环重复步骤三至步骤五;
七:当该模具上所有包材完成自动灌装之后,电控箱控制该模具进入下一工序,并控制下一模具进入该工序。
与现有技术相比,本发明的有益效果是:能够缩短灌装及拧盖时间和路径,降低灌装时包材内药液被污染的风险,同时多工位自动化灌装,提高了生产效率,结构简单,使用方便。
本发明的其他特点和优点将会在下面的具体实施方式、附图中详细的揭露。
附图说明
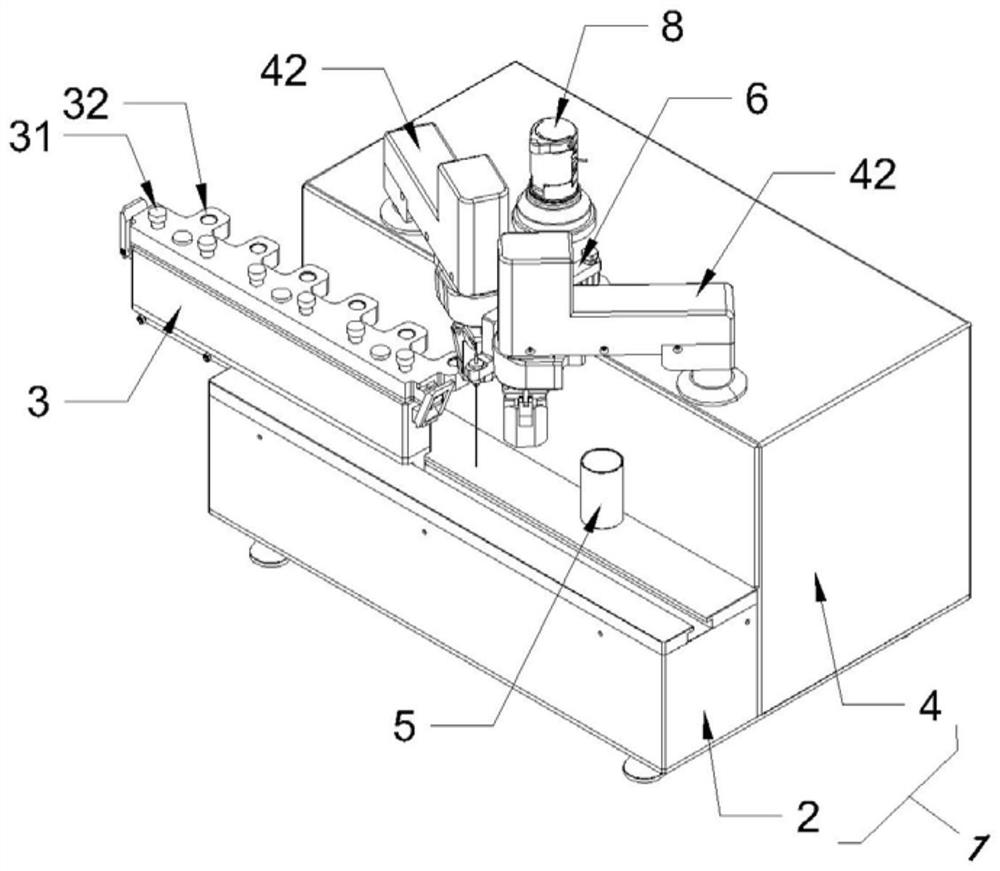
图1是本发明实施例中冻存管灌封机的一种整体结构示意图;
图2是本发明实施例中拧松机械臂的一种结构示意图;
图3是图2在B-B处的一种结构剖视图。
图中各附图标记为:灌封机1,轨道平台2,模具3,包材31,置盖槽32,拧盖灌装机4,拧松机械臂41,拧紧机械臂42,旋转臂401,拧盖旋臂402,驱动组件43,旋转组件44,驱动电机403,推杆404,导向杆405,压紧弹簧4051,收拉滑块406,同步轮407,同步带408,夹爪45,灌装针架6,蠕动泵8,IPC称重器5。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明实施例中,一种自动拧取盖的冻存管灌封机,参见图1-3所示,所述灌封机包括带有电控箱的拧盖灌装机以及与拧盖灌装机平行布置的轨道平台;所述轨道平台上设有放置包材的模具,所述轨道平台和拧盖灌装机均控制连接在电控箱上。本方案中灌封机带有智控的电控箱,用于控制灌封机的正常工作,其中拧盖灌装机4用于完成拧盖和灌装动作。
在本实施例中,所述拧盖灌装机4包括拧松机械臂41和拧紧机械臂42,所述拧松机械臂41和拧紧机械臂42的转动方向相反。拧松机械臂41用于对传送过来的模具3上的包材31进行盖子拧取下来,并将拧下来的盖子放置在模具3的对应位置上;拧紧机械臂42用于拾取模具3对应位置上的盖子并拧紧到对应包材31上。
在本实施例中,所述拧松机械臂和拧紧机械臂均包括拧盖旋臂,所述拧盖旋臂通过旋转臂驱动安装在所述拧盖灌装机上,所述拧盖旋臂包括一对互为配接的夹爪,所述拧盖旋臂上设有驱动夹爪收合的驱动组件以及驱动夹爪旋转拧盖的旋转组件;所述夹爪上设有扭力传感器,且扭力传感器与电控箱电连接。夹爪的设置便于拧松机械臂或拧紧机械臂进行拧盖,扭力传感器的设置便于判断盖子是否拧松或拧紧。
在本实施例中,所述驱动组件包括驱动电机,所述驱动电机通过推杆驱动连接在导向杆上,所述导向杆通过收拉滑块驱动连接在所述夹爪上。
在本实施例中,所述导向杆与收拉滑块之间设有压紧弹簧,且压紧弹簧套接在所述导向杆上。
在本实施例中,所述旋转组件包括与旋转臂驱动安装的同步轮,所述同步轮通过同步带驱动连接在推杆上。
在本实施例中,位于拧松机械臂41和拧紧机械臂42之间的拧盖灌装机4上还设有用于灌装的灌装针架6,所述灌装针架6伸缩式驱动在所述拧盖灌装机4上。灌装针架6设置在拧松机械臂41和拧紧机械臂42之间,不仅便于灌装前进行盖子拧松,灌装后进行盖子拧紧,且能够缩短灌装及拧盖时间和路径,降低灌装时包材内药液被污染的风险。
在本实施例中,所述灌装针架6通过蠕动泵8连通连接在灌封机1的药液桶上,所述蠕动泵8安装在所述拧盖灌装机4上。
在本实施例中,所述模具3上设有若干与包材31对应的置盖槽32。模具3的前端用于排列放置包材31,且后端设置置盖槽32,便于拧松机械臂41或拧紧机械臂42进行工作。
一种伸缩式灌封机的操作方法,所述方法包括如下步骤:
一:检查设备连接状态是否良好,以及在电控箱上设置生产所需的控制参数;
二:设备启动后,电控箱控制带包材31的模具3在轨道平台2上滑动,用于包材31的运送;
三:当包材31输送到拧盖灌装机4的拧松机械臂41下方,电控箱先控制模具3停止移动,然后控制拧松机械臂41对包材31盖子进行拧松操作,通过扭力传感器判断盖子是否拧松,若未拧松,则控制拧松机械臂41继续拧动;若已拧松,则控制拧松机械臂41移动,将拧下来的盖子放到模具3上该包材31对应的置盖槽32后,电控箱控制拧松机械臂41回到预设状态;
四:电控箱继续控制模具3向前移动,当模具3移动到灌装针架6下方,控制模具3停止移动,然后控制灌装针架6上的灌装针移动到包材31内,对包材31进行药液灌装,当灌装到预设值后,电控箱控制灌装针架6停止灌装并回到预设位置;
五:电控箱继续控制模具3向前移动,当包材31输送到拧紧机械臂42下方时,电控箱先控制模具3停止移动,然后控制拧紧机械臂42移动,并拾取模具3上对应置盖槽32内的盖子,之后控制拧紧机械臂42移动到包材31上对包材31进行盖子拧紧操作,通过扭力传感器判断盖子是否拧紧,若未拧紧,则控制拧松机械臂42继续拧动;若已拧紧,则控制拧松机械臂42移动,并回到预设状态;
六:循环重复步骤三至步骤五;
七:当该模具上所有包材完成自动灌装之后,电控箱控制该模具进入下一工序,并控制下一模具进入该工序。
可以理解的,本实施例中步骤一的控制参数包括模具3的移动距离、摇瓶器7的振动幅度、拧盖灌装机4的拧松机械臂41和拧紧机械臂42的移动距离、灌装针架6的灌装时间和灌装量、灌装针架6上灌装针的移动方式、扭力传感器的扭力阈值等。
本实施例中,灌封机1上设有与灌装针架6配接的IPC称重器5,IPC称重器5与电控箱控制连接。
在本实施例中,灌装针架6上灌装针的移动方式为:匀速下降,匀减速上升的灌装方式,能够有效防止灌装药液的飞溅。
本发明提供了一种自动拧取盖的冻存管灌封机及其操作方法,能够缩短灌装及拧盖时间和路径,降低灌装时包材内药液被污染的风险,同时多工位自动化灌装,提高了生产效率,结构简单,使用方便,可靠性高。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。