一种食品罐头封盖装置
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及食品罐头生产技术领域,尤其与一种食品罐头封盖装置相关。
背景技术
在食品罐头的生产过程中,需要先将食品放入罐体中,然后再将罐头进行封盖处理,对罐头进行封盖的原理都是通过对盖板施加压力,使盖板配合于罐体中,利用盖板与罐体之间的过盈配合,使罐头密封,而现有技术中所采用的的封盖机在对罐头进行封盖时,会出现停顿,使得对罐头的封盖作业需要间歇进行,十分影响罐头的生产效率,并且需要手动将盖板放置于罐体上,必须保证每个罐体上都有一个盖板,并且处在正确的位置上,而人工操作过程中会出现纰漏,若是罐体上没有盖板或者盖板放歪都会导致对罐头的封盖失败,从而使罐头报废。
发明内容
针对上述相关现有技术的不足,本申请提供一种食品罐头封盖装置,能够不停顿地对罐头进行封盖作业,并且自动对盖板进行输送,减少人工操作,在提高生产效率的同时,又保证封盖的成功率,具有较强的实用性。
为了实现上述目的,本发明采用以下技术:
一种食品罐头封盖装置,包括:支撑座、定位机构、送料机构、压合机构。
支撑座顶面设有绕其中心转动的转动座,转动座呈环形,且上方预定距离处设有支撑板,支撑座上还设有可拆卸的并且首尾相接的第一限位环和第二限位环,第一限位环的首端与第二限位环的末端之间具有预定间距并形成开口,开口处设有第一传送带的输送末端和第二传送带的输送起始端,用于输送罐头;定位机构包括多个安装于转动座上并沿其圆周方向相邻布置的定位块,定位块外侧设有卡槽,应用时,罐头位于第一限位环、第二限位环与定位块之间的环形区域中,且罐头卡设于卡槽中;送料机构设于开口的上方,包括间距可调的输送轨道,用于输送盖板,输送轨道包括直线段和弧形段,弧形段在竖直方向上的投影与环形区域重合,直线段内侧与定位块所围成的圆相切;压合机构包括多个安装于支撑板上并沿其圆周方向间隔均匀布置的压合组件,压合组件包括沿竖直方向移动的压块,用于将盖板压合于罐体上。
进一步地,第一传送带的两侧沿其长度方向设有第一导向杆,第二传送带的两侧沿其长度方向设有第二导向杆,其中一个第一导向杆和第二导向杆的一端位于环形区域内,第一导向杆的一端呈弯曲状,且分别与第一限位环的外圆和定位块围成的圆相切,第二导向杆的一端也呈弯曲状,且分别与第二限位环的外圆和定位块围成的圆相切。
进一步地,支撑座上设有两个支板,支板分别位于第一传送带和第二传送带的一侧,支板上穿设有转轴,转轴上端套设有转动板,转轴下端连接电机,电机安装于支板下方,转动板呈正方形,且四角均设有垂直于其侧面的凸杆,凸杆均沿转动板转动方向排布,凸杆一端从第一导向杆或者第二导向杆的一侧穿出另一侧。
进一步地,卡槽内设有凹槽,凹槽内设有推块,推块侧面设有推杆,推杆一端穿过定位块,推杆上设有挡板,推杆上还套设有弹簧,弹簧两端分别抵接到挡板和定位块的内侧,且弹簧始终处于压缩状态;转动座内侧设有支架,支架上设有定位槽,推杆位于定位槽中,且挡板位于支架和定位块之间。
进一步地,定位机构还包括顶块,顶块一侧呈弧形,另一侧连接于第一伸缩杆的移动端,第一伸缩杆安装于支撑架上,支撑座底面设有连接架,支撑架安装于连接架上,推杆一端设有连接块,连接块端面设有可转动的滚珠,应用时,滚珠与顶块的弧面接触。
进一步地,输送轨道的内轨和外轨上均设有凸块,内轨的凸块上设有连杆,连杆的一端穿设于外轨的凸块中,凸块安装于承载板的底面,承载板安装于第二伸缩杆的移动端,第二伸缩杆安装于支撑座上,承载板上设有两个垂直于输送轨道的滑槽,其中外轨的凸块至少两个上端穿设于滑槽中,并连接于第三伸缩杆的移动端,第三伸缩杆安装于承载板上。
进一步地,滑槽之间设有贯穿的通孔,通孔内设有物料框,物料框下端抵接到输送轨道顶部,物料框两侧设有第一螺杆,第一螺杆两端安装于U形架中,第一螺杆的螺纹分为两段,两段螺纹的旋向相反,且两段螺纹上分别套设有一个限位块,限位块的一端呈直角状,用于对物料框的四角限位,且靠近外轨的U形架连接于第四伸缩杆的移动端,第四伸缩杆安装于承载板上。
进一步地,输送轨道的两侧均设有楔形块,楔形块底面设有突出部,突出部侧面与第七伸缩杆的移动端连接,第七伸缩杆安装于承载架上,承载架安装于输送轨道的底面,输送轨道两侧均设有凹陷部,楔形块的一端位于凹陷部中。
进一步地,外轨的弧形段和直线段互相分离,且之间具有预定间距,外轨的弧形段外侧设有升降板,升降板套设于第二螺杆上,第二螺杆可转动的安装于竖杆的空腔内,竖杆安装于第一限位环上,竖杆两侧沿竖直方向还设有通槽,升降板两侧均设有第三螺杆,第三螺杆穿设于通槽中,并用螺母锁紧。
进一步地,压块安装于连接板上,连接板安装于第五伸缩杆的移动端,第五伸缩杆安装于支撑板的底面,压块顶面还设有两个对称布置的第六伸缩杆,第六伸缩杆的移动端设有夹杆,夹杆的底部低于压块的底面预定距离。
本发明有益效果在于:
1、能够自动将盖板输送至罐头的罐体上,并且在输送过程中不停顿地对罐头进行封盖作业,减少人工操作,避免人工放盖造成盖板位置不正甚至漏放的情况发生,在提高生产效率的同时,又保证封盖的成功率;
2、还能适应不同尺寸的罐头,将两个限位环都设置成与支撑座可拆卸连接,并且定位块也与转动座可拆卸连接,从而适应不同长度和宽度的罐头,而输送轨道也能在竖直方向上移动,适应不同高度的罐头,并且输送轨道的间距可以调节,以适应不同尺寸的盖板;
3、利用位置可以调节的限位块对物料框进行限位,避免在将物料框中的盖板转移至输送轨道上时,物料框由于设备的震动而发生晃动,进而对盖板的输送造成影响;
4、将输送轨道设置呈弧形段和直线段两部分组成,并且外轨的弧线段与直线段之间具有预定间距,并且弧线段在竖直方向上的投影位于限位环和定位块围成的弧形区域内,而内轨的直线段与定位块围成的圆相切,保证盖板能顺利从直线段过渡至弧线段,并且确保盖板处在罐头的正上方,便于后续的封盖作业顺利进行。
附图说明
本文描述的附图只是为了说明所选实施例,而不是所有可能的实施方案,更不是意图限制本发明的范围。
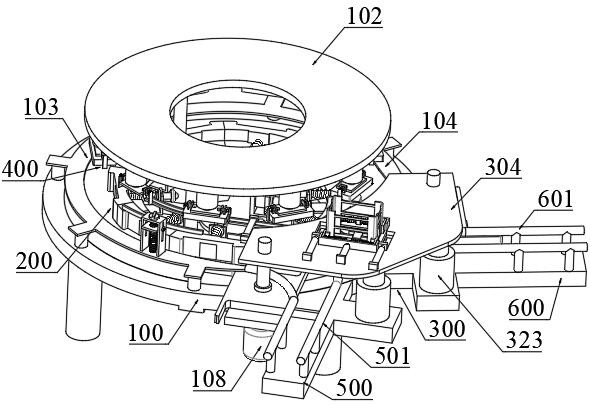
图1为本申请实施例的整体结构立体示意图。
图2为本申请实施例的定位机构安装于支撑座上的立体示意图。
图3为本申请实施例的支撑座立体示意图。
图4为本申请实施例的定位块立体示意图。
图5为本申请实施例的送料机构立体示意图。
图6为本申请实施例的楔形块安装示意图。
图7为本申请实施例的输送轨道的外轨弧形段安装示意图。
图8为本申请实施例的压合机构立体示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面结合附图对本发明的实施方式进行详细说明,但本发明所描述的实施例是本发明一部分实施例,而不是全部的实施例。
如图1~图8所示,本申请实施例提供一种食品罐头封盖装置,包括:支撑座100、定位机构200、送料机构300、压合机构400。
支撑座100顶面设有绕其中心转动的转动座101,转动座101呈环形,且上方预定距离处设有支撑板102,支撑座100上还设有可拆卸的并且首尾相接的第一限位环103和第二限位环104,第一限位环103的首端与第二限位环104的末端之间具有预定间距并形成开口,开口处设有第一传送带500的输送末端和第二传送带600的输送起始端,用于输送罐头;定位机构200包括多个安装于转动座101上并沿其圆周方向相邻布置的定位块201,定位块201外侧设有卡槽202,应用时,罐头位于第一限位环、第二限位环104与定位块201之间的环形区域中,且罐头卡设于卡槽202中;送料机构300设于开口的上方,包括间距可调的输送轨道301,用于输送盖板,输送轨道301包括直线段和弧形段,弧形段在竖直方向上的投影与环形区域重合,直线段内侧与定位块201所围成的圆相切,并且输送轨道301之间可以采用滚轮对盖板进行输送;压合机构400包括多个安装于支撑板102上并沿其圆周方向间隔均匀布置的压合组件,压合组件包括沿竖直方向移动的压块401,用于将盖板压合于罐体上。
具体地,第一传送带500的两侧沿其长度方向设有第一导向杆501,第二传送带600的两侧沿其长度方向设有第二导向杆601,其中一个第一导向杆501和第二导向杆601的一端位于环形区域内,第一导向杆501的一端呈弯曲状,且分别与第一限位环103的外圆和定位块201围成的圆相切,第二导向杆601的一端也呈弯曲状,且分别与第二限位环104的外圆和定位块201围成的圆相切,从而方便罐头从第一传送带500移动至第一限位环103与定位块201之间,并且在封盖结束后从第二限位环104与定位块201之间移动至第二传送带600上。
具体地,支撑座100上设有两个支板105,支板105分别位于第一传送带500和第二传送带600的一侧,支板105上穿设有转轴106,转轴106上端套设有转动板107,转轴106下端连接电机108,电机108安装于支板105下方,转动板107呈正方形,且四角均设有垂直于其侧面的凸杆109,凸杆109均沿转动板107转动方向排布,凸杆109一端从第一导向杆501或者第二导向杆601的一侧穿出另一侧,在转动板107转动时,罐头的长度方向一侧与转动板107接触,而宽度方向一侧与凸杆109接触,从而在转动板107的转动下,将罐头从第一传送带500移动至第一限位环103与定位块201之间,在罐头与第一导向杆501推力接触时,罐头恰好卡设于卡槽202中,并且在封盖结束后从第二限位环104与定位块201之间移动至第二传送带600上。
具体地,卡槽202内设有凹槽203,凹槽203内设有推块204,推块204侧面设有推杆205,推杆205一端穿过定位块201,推杆205上设有挡板208,推杆205上还套设有弹簧209,弹簧209两端分别抵接到挡板208和定位块201的内侧,且弹簧209始终处于压缩状态,在罐头卡设于卡槽202中时,弹簧209的弹力会将推块204一直限制在凹槽203中;转动座101内侧设有支架210,支架210上设有定位槽211,推杆205位于定位槽211中,且挡板208位于支架210和定位块201之间,保证推杆205的定位块201转动过程中保持稳定。
更加具体地,定位块201底面设有卡块215,转动座101表面沿圆周方向设有多个限位槽111,卡块215配合于限位槽111中。
具体地,定位机构200还包括顶块212,推杆205一端设有连接块206,连接块206端面设有可转动的滚珠207,应用时,滚珠207与顶块212的弧面接触,顶块212一侧呈弧形,增大顶块212与滚珠207的接触时间,保证推块204能顺利将罐头从卡槽202中推出,另一侧连接于第一伸缩杆213的移动端,第一伸缩杆213安装于支撑架214上,支撑座100底面设有连接架110,支撑架214安装于连接架110上。
具体地,输送轨道301的内轨和外轨上均设有凸块302,内轨的凸块302上设有连杆303,连杆303的一端穿设于外轨的凸块302中,凸块302安装于承载板304的底面,承载板304安装于第二伸缩杆323的移动端,第二伸缩杆323安装于支撑座100上,承载板304上设有两个垂直于输送轨道301的滑槽305,其中外轨的凸块302至少两个上端穿设于滑槽305中,并连接于第三伸缩杆306的移动端,第三伸缩杆306安装于承载板304上,通过第三伸缩杆306来推动外轨的凸块302移动,从而调整内轨和外轨之间的间距,以适应不同尺寸的盖板。
具体地,滑槽305之间设有贯穿的通孔307,通孔307内设有放置盖板的物料框308,根据不同尺寸的罐头选择不同尺寸的盖板,则物料框308的尺寸的应当不同,物料框308下端抵接到输送轨道301顶部,物料框308两侧设有第一螺杆309,第一螺杆309两端安装于U形架310中,第一螺杆309的螺纹分为两段,两段螺纹的旋向相反,且两段螺纹上分别套设有一个限位块311,两个限位块311相向或者相反的方向移动,限位块311的一端呈直角状,用于对物料框308的四角限位,且靠近外轨的U形架310连接于第四伸缩杆312的移动端,第四伸缩杆312安装于承载板304上,第四伸缩杆312推动靠近外轨的U形架310移动,从而适应不同尺寸的物料框308。
具体地,输送轨道301的两侧均设有楔形块313,楔形块313底面设有突出部314,突出部314侧面与第七伸缩杆315的移动端连接,第七伸缩杆315安装于承载架316上,承载架316安装于输送轨道301的底面,输送轨道301两侧均设有凹陷部317,楔形块313的一端位于凹陷部317中,在第七伸缩杆315的推动下,楔形块313朝向输送轨道301中轴线移动,在移动过程中将最下一个盖板和上一个盖板分离,最下一个盖板在输送轨道301的输送下,朝向其弧形段移动,直到移动至弧形段与直线段的过渡处。
具体地,外轨的弧形段和直线段互相分离,且之间具有预定间距,避免盖板在从直线段移动至弧形段上时发生干涉,外轨的弧形段外侧设有升降板318,升降板318套设于第二螺杆319上,第二螺杆319可转动的安装于竖杆320的空腔内,转动第二螺杆319即可使外轨的弧形段上升或者下降,从而与直线段的高度相匹配,竖杆320安装于第一限位环103上,竖杆320两侧沿竖直方向还设有通槽321,升降板318两侧均设有第三螺杆322,第三螺杆322穿设于通槽321中,并用螺母锁紧,从而将外轨的弧形段锁紧,避免其晃动。
具体地,压块401可拆卸地安装于连接板402上,可以采用螺钉进行连接,在对不同尺寸的食品罐头进行生产时,便于更换相应的压块401,连接板402安装于第五伸缩杆403的移动端,第五伸缩杆403安装于支撑板102的底面,并且沿支撑板102的直径方向移动,以适配不同的定位块201,压块401顶面还设有两个对称布置的第六伸缩杆404,第六伸缩杆404的移动端设有夹杆405,夹杆405的底部低于压块401的底面预定距离,用来对盖板进行夹持。
利用上述装置将对食品罐头进行封盖的详细操作步骤为:
首先根据所要进行生产的食品罐头的尺寸对各零部件进行适配性调整,将第一限位环103和第二限位环104安装于底座100上,不同直径的第一限位环103上对应不同直径的外轨的弧形段,并且选择卡槽202的宽度合适的卡块201安装于转动座101上,并且推杆205位于支架210的定位槽211中,之后根据食品罐头的高度和宽度调整输送轨道301的高度以及间距,启动第二伸缩杆323,使承载板304上升或者下降,然后启动第三伸缩杆306,使输送轨道301的外轨朝向内轨移动,然后在承载板304的通孔307内放置物料框308,启动第四伸缩杆312,使U形架310朝向另一个U形架310移动,并且转动两个第一螺杆309,使同侧的两个限位块311相向移动,从而将物料框308卡紧,并在物料框308内放置盖板,之后即可开始进行罐头的封盖作业;
启动第一传送带500和第二传送带600,第一传送带500开始向转动座101中输送还未封盖的罐体,同时启动电机108,驱使转轴109转动,转动板107也开始转动,在转动板107的推动下,在第一传送带500上的罐头被推到第一限位环、第二限位环104与定位块201之间形成的环形区域中,并且罐头卡在卡槽202中,随着转动座101的继续抓动,从而使罐头跟随转动,在罐头卡在卡槽202中的同时,盖板移动至输送轨道301的弧形段与直线段的交界处,此时启动第五伸缩杆403,使压块401向下移动,直到与盖板接触,与此同时,启动第六伸缩杆404,使两个夹杆405相向移动,对盖板进行夹持,并且使盖板处在罐体的正上方,盖板跟随罐体一起移动,在盖板从输送轨道301移出后,使压块401继续下降,在压块401的压力下,盖板被压入罐体中,之后将压块401收回,在封盖后的罐头移动至即将到达开口时,启动第一伸缩杆213,使顶块212朝向外侧移动,顶块212会与滚珠207接触,并迫使推块204移动,从而将罐头从卡槽202中移出,此时第二传送带600一侧的转动板107会将封盖后的罐头推到第二传送带600上。
以上仅为本发明的优选实施例,并不用于限制本发明,显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。