机械臂、具有机械臂的机器人和包装设备
文献发布时间:2023-06-19 18:35:48
技术领域
本发明涉及一种机械臂,特别是一种被配置为在灭菌和/或无菌环境中,甚至更特别是在用于包装可倾倒产品的设备的灭菌和/或无菌环境中操作的机械臂。
有利地,本发明进一步涉及一种机器人,特别是一种用于在灭菌和/或无菌环境中操作的机器人,甚至更特别是用于在用于包装可倾倒产品的设备的灭菌和/或无菌环境中操作的机器人。
有利地,本发明还涉及一种具有机器人的用于包装可倾倒产品的包装设备。
背景技术
用于包装可倾倒食品(例如用于将可倾倒食品包装到诸如瓶子、罐听等容器中)的自动包装设备是已知的。
已知一些包装设备包括无菌环境以便将可倾倒食品包装在无菌环境中。这些类型的设备包括将灭菌和/或无菌内部环境与外部环境隔开的隔离室,以及布置在内部环境中的至少一个处理机器,例如填充器、封盖机、吹塑机或类似物。
在生产期间或在休息期间,可能需要在内部环境中执行某些操作。已知的操作可以例如是对质量控制问题进行探测、进入和/或更换和/或修理处理机器的部分等。
当进入内部环境时,人们希望避免损害内部环境中的灭菌和/或无菌条件。因此,该设备可以例如配备有手套,具有与外部环境流体连接的针对手和/或胳膊的进入点。然而,此类解决方案的应用有限,因此,一系列操作导致技术操作员需要进入内部环境,这在技术操作员的活动终止后导致执行灭菌循环的必要性。
因此,在本领域中需要提供用于克服一个或多个上述缺点的手段。
在本领域中还需要提供用于包装可倾倒产品的改进的包装设备。
发明内容
因此,本发明的一个目的是提供以简单且低成本的方式克服上述缺点的手段。
有利地,因此本发明的一个目的是提供一种以简单且低成本的方式克服上述缺点的包装设备。
根据本发明,提供如权利要求1所述的机械臂。
优选的非限制性实施方案在直接或间接从属于权利要求1的权利要求中请求保护。
根据本发明,还提供了根据权利要求15所述的机器人。
根据本发明,提供了根据权利要求16所述的设备。
附图说明
将参照附图以示例的方式描述本发明的非限制性实施方案,其中:
图1是根据本发明的具有机器人的设备的示意性俯视图,其中为清楚起见去除了一些部件;
图2是图1的机器人的一部分处于一种状态的局部分解侧视图,在该状态下,机器人的机械臂的第二臂部分相对于同一机械臂的第一臂部分采用第一轴向位置,其中为清楚起见去除了一些部件;
图3是图2的一部分处于一种状态的透视图,在该状态下,第二臂部分相对于第一臂部分采用第二轴向位置,其中为清楚起见去除了一些部件;
图4是机械臂的第二臂部分,以及机械关节的一部分的透视图,其中为清楚起见去除了一些部件;
图5是第一臂部分和机械关节的透视图,其中为清楚起见去除了一些部件;
图6是机械关节在对应于采用第一轴向位置的第二臂部分的状态下的透视图,其中为清楚起见去除了一些部件;
图7是处于对应于相对于第一臂部分采用第二轴向位置和第一角位置的第二臂部分的状态下的机械关节的透视图,其中为清楚起见去除了一些部件;
图8是处于图7的状态下的机械关节的示意性前视和局部视图,其中为清楚起见去除了一些部件;
图9是机械关节处于对应于相对于第一臂部分采用第二轴向位置和第二角位置的第二臂部分的状态下的示意性前视和局部示意图,其中为清楚起见去除了一些部件;
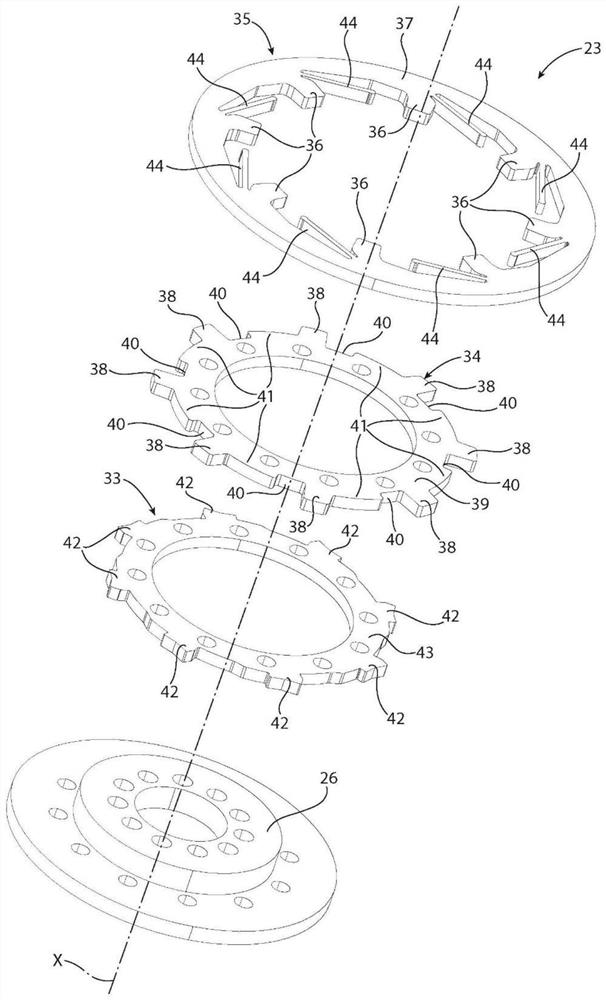
图10是机械关节的分解图,其中为清楚起见去除了一些部件。
具体实施方式
图1中的标记1整体表示用于包装可倾倒产品,特别是可倾倒食品的包装设备。
包装设备1可以是自动包装设备,其被配置成用于将可倾倒产品,特别是可倾倒食品包装到容器2中。容器可以是瓶子、坛子、罐子、贮存器等。容器可以由基材组分(如玻璃、纸或纸板、塑料、铝、钢和复合材料)制成。
可倾倒产品可以是可倾倒食品,例如碳酸液体(例如气泡水、软饮料和啤酒)、非碳酸液体(包括不起泡水、果汁、茶、移动饮料、酒、奶等),乳液,或含有果肉的饮料。
每个容器2可以包括保持可倾倒产品的主体和用于闭合主体的盖。封盖可以是皇冠软木塞、螺旋盖、移动盖、塞子或类似物(并且由诸如塑料和金属等多种材料制成)。
该设备包括用于包装可倾倒产品的机器。该设备包括机器所在的内部环境4。该设备被配置成使得所述环境是灭菌和/或无菌的。
设备1包括机器人6。机器人6被配置成用于在内部环境4内操作。机器人6包括机械臂20。
设备1可以包括将(灭菌和/或无菌的)内部环境4与外部环境5隔开的隔离室3。
该设备可以包括多个处理机器。
更详细地,每台机器可以被配置成用于执行至少一个处理步骤。特别地,每个处理步骤可以(以一种或另一种方式)有助于可倾倒产品的包装。
例如,一个处理机器可以是输送机7,该输送机7被配置成用于沿内部环境4和/或隔离室3内的推进路径P推进(一系列)容器2。
替代地或附加地,处理机器可以是布置在内部环境4内的填充机8。填充机被配置成用于在容器2沿着推进路径P的至少填充部分P1推进期间用可倾倒产品填充容器2。
替代地或附加地,处理机器可以是封盖机9。封盖机9布置在内部环境4内。封盖机9被配置成用于在填充的容器2沿着推进路径P的至少封盖部分P2推进期间封盖该容器2。封盖部分P2根据容器2的推进方向布置在填充部分P1的下游。
根据图1所示的具体实施方案,设备1可以包括输送机7、填充机8和封盖机9,或者可以包括填充机8和封盖机9。
附加地或替代地,设备1可以包括填充和封盖机。填充和封盖机被配置成用于用可倾倒产品填充容器2并且用于对填充的容器2进行封盖。
附加地或替代地,处理机器可以是用于由预成型件形成容器2的吹塑机。
更详细地,隔离室3可以包括入口13和出口14。入口13被配置成用于将容器2或预成型件输入到内部环境4中。出口14被配置成用于从内部环境4输出处理过的容器2。
此外,隔离室3可以包括界定内部环境4的多个壁15(仅示出一些)。例如,每个壁可以在相应侧面上界定内部环境4。隔离室3承载入口13和出口14。
设备1可以包括调节单元,其被配置为控制内部环境4内的环境条件,例如温度和/或湿度和/或无菌和/或清洁度和/或气流(方向)。
更具体地,机器人6可以包括底座。底座承载机械臂20。
优选地,机械臂20可以包括至少一对臂部分。该对臂部分可以包括例如末端执行器和承载末端执行器的腕部。该对能够可替代地包括腕部和前臂。该对能够可替代地包括前臂和肘部。该对能够可替代地包括肘部和二头肌部分。该对能够可替代地包括二头肌部分和肩部。该对能够可替代地包括肩部和塔部。
通常,该对包括第一臂部分21和第二臂部分22。
将参照图2至图10解释进一步的细节。图2至图5涉及第一臂部分21为肩部且第二臂部分22为二头肌部分的示例。
机械臂20被配置成使得第二臂部分22可以相对于第一臂部分21经受相对轴向移动。相对轴向移动沿着轴线X,并且在第一轴向位置和第二轴向位置之间。图2和图6涉及第二臂部分22采用第一轴向位置的状态。图3涉及第二臂部分22采用第二轴向位置的状态。
在第一轴向位置,第一臂部分21和第二臂部分22沿轴线X相互间隔开。在第二轴向位置,第一臂部分21和第二臂部分22轴向相互机械接触,从而限定公共外壳25。公共外壳25在图3中可见。
第一臂部分21限定或具有至少一个相应的第一端28。第二臂部分22限定或具有至少一个相应的第二端29。第一端28和第二端29中的每一个是轴向端。在第二臂部分22的第二轴向位置,第一臂部分21的第一端28和第二臂部分22的第二端29轴向相互机械接触,使得第一臂部分21和第二臂部分22限定公共外壳25。
第一臂部分21包括第一壳体24a。第二臂部分22包括第二壳体24b。臂20被配置成使得当第二臂部分22采用第二轴向位置时,第一壳体24a和第二壳体24b一起限定公共外壳25。
相对轴向移动可以通过移动和操纵第一臂部分21,或者通过移动和操纵第二臂部分22,或者通过移动和操纵第一臂部分21和第二臂部分22两者来获得。
臂20包括头部26。头部26由所述第一臂部分21支撑。臂20被配置成使得头部26可相对于第一臂部分21并围绕轴线X旋转。
臂20包括马达27。臂20被配置成使得马达27使头部26相对于第一臂部分21并绕轴线X旋转。马达27由第一臂部分21支撑。马达27仅在图2中示出。头部26在图2和10中示出。
马达27至少部分或完全定位在第一壳体24a内。
臂20被配置成使得第二臂部分22在采用所述第二轴向位置时能够经受相对旋转移动。相对旋转移动相对于第一臂部分21并且围绕所述轴线X。相对旋转移动在第一角位置和第二角位置之间。如下文将更清楚的,图7和图8涉及第二臂部分22采用第二轴向位置和第一角位置的状态。如下文将更清楚的,图9涉及第二臂部分22采用第二轴向位置和第二角位置的状态。
相对旋转移动可以通过移动和操纵第一臂部分21,或者通过移动和操纵第二臂部分22,或者通过移动和操纵第一臂部分21和第二臂部分22两者来获得。
臂20包括机械关节23。机械关节23部分地由第一臂部分21并部分地由第二臂部分22整体支撑。
关节23被配置为采用操作状态。图5和图9涉及机械关节23采用操作状态的状态。臂20被配置成使得借助于关节23采用操作状态,第二臂部分22可以与头部26围绕轴线26的旋转操作地成一体。
特别地,当关节23处于操作状态时,第二臂部分22可操作地且固定地耦合到头部26。以这种方式,头部26围绕轴线X的任何旋转速度可以可操作地传递到第二臂部分22,以便还引起第二臂部分22围绕轴线X的旋转。
机械臂20被配置成使得机械关节23的操作状态对应于第二臂部分22的第二轴向位置和第二角位置。机械关节20被配置成使得机械关节23的操作状态由相对于第一臂部分21采用第二轴向位置和第二角位置的第二臂部分22引起。机械臂20被配置成使得关节23的操作状态由相对于第一臂部分21采用第二轴向位置和第二角位置的第二臂部分22限定。机械臂20被配置成使得关节23的操作状态对应于采用第二轴向位置和第二角位置的第二臂部分22。可以通过执行安装方法使关节23从非操作状态变为操作状态。该安装方法用于安装机械臂20。该安装方法包括使第二臂部分22在从第一轴向位置到第二轴向位置的方向上执行轴向移动,随后使第二臂部分22在从第一角位置到第二角位置的方向上执行旋转移动。可以通过执行拆卸方法使关节23从操作状态变为非操作状态。拆卸方法是用于拆卸机械臂20。拆卸方法包括使第二臂部分22在从第二角位置到第一角位置的方向上执行旋转移动,随后使第二臂部分22在沿从第二轴向位置到第一轴向位置的方向上执行轴向移动。
臂20被配置成使得关节23的操作条件对应于关节23被布置或定位在外壳25内。臂20被配置成使得关节23的操作条件对应于关节23被完全布置或定位在外壳25内。臂20被配置成使得关节23在采用操作状态时被布置或位于外壳25内。臂20被配置成使得关节23在采用操作状态时被布置或完全位于外壳25内。
需要注意的是,图3中可见的任何螺钉都不是机械关节23的一部分,并且不旨在有助于机械关节23执行的任何功能。
因此,机械关节23可操作地被保护在由机械臂20限定的外壳25内,并且关节23的任何部分都没有伸出外壳25。一方面,这有助于在其降低时保持内部环境4内的无菌状态或消除关节23的机械配置可能成为污染源的风险,该污染将从机械臂20扩散到内部环境4中。关节23被配置为采用空闲状态。图7和图8涉及机械关节23采用空闲状态的情况。臂20被配置成使得当关节23采用空闲状态时,第二臂部分22尚未与头部26围绕轴线X的旋转操作地成一体。
机械臂20被配置成使得机械关节23的空闲状态对应于第二臂部分22的第二轴向位置和第一角位置。机械关节20被配置成使得机械关节23的空闲状态由相对于第一臂部分21采用第二轴向位置和第一角位置的第二臂部分22引起。机械臂20被配置成使得关节23的空闲状态由采用第二轴向位置和第一角位置的第二臂部分22限定。机械臂20被配置成使得关节23的空闲状态对应于采用第二轴向位置和第一角位置的第二臂部分22。
在安装方法期间,在从第一轴向位置到第二轴向位置的方向上的轴向移动使关节23处于空闲状态。随后,在从第一角位置到第二角位置的方向上的角移动使关节23从空闲状态变为操作状态。
在拆卸方法期间,从第二角位置到第一角位置的方向上的旋转移动使关节23处于空闲状态。随后,在从第二轴向位置到第一轴向位置的方向上的轴向移动使关节23从空闲状态变为非操作状态。
因此,安装方法和/或拆卸方法可以更快捷和/或更简单。以这种方式,机器人6的组装和/或拆卸可以更快捷和/或更简单。
臂20可以包括一个或多个密封元件。臂20被配置成使得,在关节23的空闲状态和操作状态两者下,一个或多个密封元件布置在第一臂部分21(特别是相应的端部28)与第二臂部分22(特别是相应的端部29)之间以便进一步保证外壳25的密封。
臂20被配置成使得在关节23的操作状态下,马达27的操作不能使关节23从操作状态变为空闲状态,具体原因将在下面进一步解释。
关节23包括安装或固定到头部26上的第一盘33。关节23包括安装或固定到第一盘33上的第二盘34。关节23包括安装或固定到第二盘33上的第三盘35。因此,第一盘33和第二盘34由第一臂部分21支撑,并且第三盘35由第二臂部分22支撑。
关节23被配置成使得操作状态对应于轴向耦合和旋转耦合或者由轴向耦合和旋转耦合引起。轴向耦合沿着所述轴线X并且在第三盘35和第二盘34之间。旋转耦合围绕所述轴线X并且在第三盘35和第一盘33之间。
以这种方式,臂20被配置成使得第二臂部分22的所述轴向移动和旋转移动一起对应于第三盘35相对于第二盘34的卡栓移动。以这种方式,臂20设置有机械关节23,其被配置为降低或消除污染风险,并且同时被配置成用于使安装和拆卸方法更简单和更快捷。在机械关节23的操作状态下,第三盘35相对于头部26沿轴线X和围绕轴线X的相对轴向移动和角移动至少受到限制或完全被阻止。
旋转耦合对应于大于下限的耦合扭矩。下限对应于马达27的最大操作扭矩。以这种方式,在机器人6的使用期间可以操作地保持旋转耦合。耦合扭矩小于上限。
马达27包括减速器或齿轮单元。该上限对应于马达27的减速器或齿轮单元的最大可承受扭矩。以这种方式,臂20的拆卸不会对马达27造成任何损坏。
第三盘35包括多个齿36。第三盘35的齿36围绕轴线X成角度地分布。第二盘34包括多个齿38。第二盘34的齿38围绕轴线X成角度地分布。
关节23被配置成使得在第二臂部分22的所述第一轴向位置,第三盘35的齿36围绕所述轴线X相对于第二盘34的齿38成角度地交错。
关节23被配置成使得所述轴向移动对应于第三盘35的每个齿36在第二盘34的两个相应成角度连续的齿38之间的通道。
以这种方式,可以在安装第二盘34的同时获得轴向移动,以简化安装和拆卸方法。
第二盘34包括多个狭槽40。狭槽40围绕轴线X成角度地分布。每个狭槽40限定在第二盘34的两个相应成角度连续的齿38之间。
关节23被配置成使得每个狭槽40在轴向移动期间引导第三盘35的相应齿36在第二盘34的两个相应成角度连续的齿35之间的通道。
以这种方式,第二臂部分22在第一轴向位置和第二轴向位置之间的移动可以由属于同一关节23的部件引导。因此进一步简化了安装和拆卸方法。
第二盘34包括围绕轴线X成角度分布的多个辅助部分41。每个辅助部分41布置在第二盘34的两个相应成角度连续的齿38之间。第二盘34被配置成使得每个槽40围绕轴线X的成角度延伸部由第二盘34的相应齿38和相应的辅助部分41界定。
通过提供辅助元件41,可保证第三盘35相对于第二盘34的特别是在安装期间的正确对准。
为了获得所述轴向耦合,臂20被配置成使得第二臂部分22在从第一角位置到第二角位置的方向上的旋转移动导致第三盘35的每个齿36相对于第二盘34的相应齿38采用围绕所述轴线X的相同角位置。以这种方式,随着在从第一角位置到第二角位置的方向上的旋转移动,第三盘35的每个齿36沿平行于轴线X的轴向方向在空间上插入在头部26和第二盘34的相应齿38之间。所述方向由图6和7的箭头D指示。随着在从第一角位置到第二角位置的方向上的旋转移动,第三盘35的每个齿36变得与第二盘34的相应齿38成角度地对齐。
以这种方式,由于第三盘35的每个齿36在空间上插入第二盘34的相应齿38和头部26之间,因此实现了第二臂部分22相对于第一臂部分21并沿轴线X的轴向移动被阻止。
第二盘34沿所述方向D与头部26隔开轴向距离,该轴向距离设计成使得所述轴向耦合对应于第三盘35的每个齿36通过第二盘34的相应齿38和头部26之间的机械接触而被锁定。因此,增加了轴向耦合。以这种方式,机械臂20在操作期间可以更加准确。
第一盘33包括多个齿42。第一盘33的齿42围绕所述轴线X成角度地分布。
为了获得所述旋转耦合,机械臂20被配置成使得在从第一角位置到第二角位置的方向上的所述角移动导致第三盘35的每个齿36机械地接触第一盘35的相应齿42。
因此,可同时获得轴向耦合和旋转耦合。以这种方式,安装方法和拆卸方法可以更快捷且更简单。
第三盘35包括多个接合元件44。接合元件44围绕所述轴线X成角度地分布。每个接合元件44成角度地插入在第三盘35的两个相应成角度连续的齿36之间。
为了获得所述旋转耦合,机械臂20被配置成使得在从第一角位置到第二角位置的方向上的所述角移动使每个接合元件44机械地锁定在第一盘33的相应齿42上。以这种方式,对于包括第三盘35的相应齿36和第三盘35的相应接合元件44的每个耦合,旋转耦合对应于第三盘35的齿36和第一盘33的相应齿42之间的机械接触,并且对应于接合元件44锁定在第一盘33的另一个相应齿42上。这种情况可以关于图9进行理解。
以这种方式,旋转耦合在顺时针方向和逆时针方向都起作用。
因此,关节23的操作状态对应于:
-第一盘33的每个齿42围绕轴线X被旋转地锁定在相应的接合元件44和第三盘35的相应齿36之间;
-第三盘35的每个齿36沿平行于轴线X的方向D轴向锁定在头部26和第二盘34的相应齿38之间。
因此,可以通过非常紧凑的关节23来增加旋转耦合扭矩。以这种方式,关节23的效率得到提高。
每个接合元件44均包括柔性突耳。臂20被配置成使得在从第一角位置到第二角位置的方向上的所述旋转移动借助于卡扣运动使每个柔性突耳贴靠在第一盘33的相应齿42上。能够经受卡扣运动的柔性突耳的使用减少了机械关节23的重量。
突耳可以成形为调节旋转耦合扭矩。以这种方式,关节23的制造期间的灵活性得到改善。
臂20被配置成使得,借助于第三盘35的突耳和第一盘33的齿42中的至少一种,耦合扭矩大于上述下限和/或小于上述上限。
特别地,在第二臂部分22在从第一角位置到第二角位置的方向上的旋转移动期间,每个接合元件44,特别是相应的柔性突耳,在相应的齿42上移动以执行相应的卡扣运动。
在拆卸方法期间,必须在第三盘35上施加从第二角位置到第一角位置方向上的拆卸扭矩。拆卸扭矩必须克服耦合扭矩,该耦合扭矩大于马达27的最大操作扭矩和/或小于马达27的减速器或齿轮单元的最大可承受扭矩。
第一盘33和第二盘34中的至少一个从第一壳体24a突出。可能的是,第一盘33和第二盘34中的每一个都从第一壳体24a突出。第三盘35安装在第二壳体24b内。以这种方式,当第二臂部分22采用第二轴向位置时,机械关节可以布置在壳体25内。
替代地,可能的是,第一盘33和第二盘34安装在第一壳体24a内,并且第三盘35从第二壳体24b突出。
第一盘33可以包括主环43。第一盘33的齿42从第一盘33的主环43径向突出。第二盘34可以包括主环39。第二盘34的齿38从第二盘34的主环39径向突出。第三盘35可以包括主环37。第三盘35的齿36和接合元件44从第三盘35的主环37径向突出。
第三盘35的齿36和接合元件44相对于轴线X径向向内突出。第一盘33的齿42和第二盘34的齿38相对于轴线X径向向外突出。
以这种方式,这些盘可以有效地相互配合以获得轴向耦合和旋转耦合,从而提供非常紧凑的关节23。
替代地,第三盘35的齿36和接合元件44可以相对于轴线X径向向外突出,并且第一盘33的齿42和第二盘34的齿38可以相对于轴线X径向向内突出。
机械臂20和/或机器人6和/或设备1的优点将从前面的描述中显见。
特别地,机械臂20可以容易地组装和拆卸,从而也保证了在无菌环境中使用机械臂20的可能性。
另一个优点在于,当关节23处于操作状态时,机械关节23不需要使用任何从外壳25突出的元件。
第一盘33可以借助于电腐蚀工艺制成。第二盘34可以借助于电腐蚀工艺制成。第三盘35可以借助于电腐蚀工艺制成。借助于电腐蚀工艺,每个盘的形状可以根据需要尽可能复杂,以使安装和拆卸方法尽可能容易。例如,在第一盘33的两个成角度连续的齿42之间的每个部分中的第一盘33的表面的形状可以成形为在从第一轴向位置到第二轴向位置的方向上的轴向移动期间避免与第三盘35的任何干涉,特别是在第三盘35已经轴向穿过第二盘35之后。此外,该表面可以成形为允许第一盘33借助于在从第一角位置到第二角位置的方向上的旋转移动进行径向定心。
显然,可以对本文所述的机械臂20和/或机器人6和/或设备进行改变,而不偏离如所附权利要求所限定的保护范围。