一种基于计算机图形学的农机作业面积测算方法
文献发布时间:2023-06-19 19:23:34
技术领域
本发明属于农机技术领域,具体涉及一种基于计算机图形学的农机作业面积测算方法。
背景技术
在精准农业的发展趋势下,农业现代化水平和自动化程度在不断的发展和提高,对农机作业面积的精确计算也越来越重要。精确的农机作业面积测算及重复作业面积统计不仅关系到政府补贴发放、农机操作人员费用结算,更关系到农业数据统计和作业效率评估以及整体作业进度管理。
目前带有卫星定位功能的农机智能终端在耕、种、管、收各环节的应用越来越普及,依托定位技术出现了一些作业面积计算方法,如:多边形边界建模法、栅格面积积分法、空间网络剖分法。多边形区域边界建模法采集多边形农田作业区域边界的顶点,建立上边界函数模型和下边界函数模型完成边界建模,然后计算上下边界函数之间的面积,该方法对区域边界顶点定位的准确性要求较高,边界顶点定位不准确,作业面积测算结果也不准确且并没有对重耕问题进行有效地解决。栅格积分算法根据作业轨迹计算出大致的作业边界,并按照一定的边长对作业范围进行栅格化,然后将作业点看作孤立点,根据坐标分别映射到对应的栅格中,最后通过统计有作业点的栅格个数乘上每个栅格的面积得到作业面积。此种算法可以有效的解决重耕问题,但是计算精度受栅格边长选择的影响较大,并且在轨迹较为分散,作业范围较大的情况下计算量过大,算法效率低下。空间网格剖分法主要利用机器学习方法来对耕地区域进行区域划分,如利用聚类算法对区域进行聚类分块,但是现有方法并没有应用该方法解决作业重耕问题,且由于耕地路径不规则,导致聚类后的区域存在很多无定位点的空白区域,所以聚类方法及其改进方法的直接应用并不能有效的对区域进行分块划分。
发明内容
本发明要解决的问题是提供一种基于计算机图形学的农机作业面积测算方法,不仅能够准确高效计算出作业面积和重复作业面积的大小,而且还能实时反映出作业地块面积分布,可以部署在硬件资源和计算能力都不是很高的农机终端中,直观的反映农机操作员的驾驶作业情况。
为解决上述技术问题,本发明采用的技术方案是:一种基于计算机图形学的农机作业面积测算方法,包括以下步骤:步骤A、根据农机记录的所有作业轨迹点建立地块图形;步骤B、以地块图形中的一个点为原点建立坐标系,坐标系中经度方向为X轴,纬度方向为Y轴;步骤C、将得到的地块图形离散为像素点,像素点是边长为L
进一步的,在步骤A中遍历所有作业轨迹点,计算得到轨迹点中经度方向的最长距离D
进一步的,在步骤B中遍历所有作业轨迹点,找到轨迹点中位于最西侧的经度值lon
进一步的,在步骤E中,通过Bresenham算法在地块图形上确定相邻轨迹点轨迹轮廓,轨迹轮廓面积为w*l+π(w/2)
进一步的,步骤E中采用种子填充算法对轨迹轮廓内的像素点的状态进行修改,初始状态时所有像素点均为未作业像素点S
本发明的有益效果是:通过计算机图形学将地块图形离散化为像素点,在图形像素点面积划分很小的情况下能够达到很高的测算精度,且可以实时、准确的判别重复作业面积,真实的反映出作业地块的面积分布,对于辅助农机操作人员提高作业质量和效率及作业统计分析具有重要意义;可以部署在硬件资源和计算能力都不是很高的农机终端中,即:处理器只需要在内存中开辟一块虚拟图形缓存,每次计算根据最新两个轨迹点的轮廓修改轮廓内像素点状态,然后遍历图形缓存根据每个像素点状态进行简单的判断和面积累加即可以得到准确的面积测算结果,将该图形缓存显示在显示器上,可以直观的反映农机操作员的驾驶作业情况。
下面结合附图对本发明进行详细说明。
附图说明
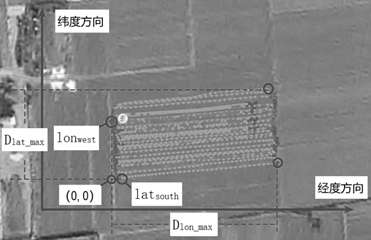
图1为根据地块图形建立的坐标系;
图2为网格划分为像素点后的地块图形;
图3为两个相邻轨迹点的轨迹轮廓的示意图;
图4为对像素点的状态进行修改的示意图;
图5为地块图形中的像素点状态修改后的示意图。
具体实施方式
本发明提供了一种基于计算机图形学的农机作业面积测算方法,包括以下步骤。
步骤A、根据农机记录的所有作业轨迹点建立地块图形。
具体地,遍历所有作业轨迹点,计算得到轨迹点中经度方向的最长距离D
步骤B、以地块图形中的一个点为原点建立坐标系,坐标系中经度方向为X轴,纬度方向为Y轴。
具体地,遍历所有作业轨迹点,找到轨迹点中位于最西侧的经度值lon
步骤C、将得到的地块图形离散为像素点,像素点是边长为L
在本步骤中,将地块图形以单位长度L
步骤D、计算所有作业轨迹点相对于原点的距离并沿X轴和Y轴方向进行投影得到各作业轨迹点在坐标系中的坐标。
步骤E、将所有作业轨迹点的坐标按时间顺序进行排序,根据农具的幅宽在地块图形上确定所有相邻轨迹点的轨迹轮廓并按照时间顺序依次对轨迹轮廓内像素点的状态进行修改。相邻轨迹点的轮廓面积为w*l+π(w/2)
由于农机在作业时行进速度较慢而轨迹点的更新频率很快,所以认为两个相邻定位点之间的轨迹近似是一条直线,其轮廓是一个矩形,宽度为农具的幅宽w,长度为相邻定位点间的连线距离l。同时,为了保证轨迹轮廓的连贯性认为定位点处的轨迹轮廓是一个以定位点为圆心,以幅宽为直径的圆。这样相邻轨迹点(x
可以是得到所有相邻轨迹点的轨迹轮廓后再对轨迹轮廓内像素点的状态进行修改,也可以是一边计算相邻轨迹点的轨迹轮廓一边对轨迹轮廓内像素点的状态进行修改。
进一步的,根据在地块图形上确定的轨迹轮廓,采用种子填充算法对轨迹轮廓内的像素点的状态进行修改,得到未作业像素点S
具体地,初始状态时所有像素点均为未作业像素点S
如图4所示,在对像素点的状态进行修改时:
a.如果当前像素点状态为未作业像素点S
b.如果当前像素点状态为重复作业像素点S
c.如果当前像素点状态为已作业像素点S
步骤F、分别统计地块图形中已作业像素点S
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制;尽管参照较佳实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者对部分技术特征进行等同替换;而不脱离本发明技术方案的精神,其均应涵盖在本发明请求保护的技术方案范围当中。