具有电动马达的振动锤
文献发布时间:2023-06-19 19:37:02
技术领域
本发明涉及一种用于将板桩、管道或其他元件打入土壤或从土壤收回的振动锤,所述振动锤包括:
-振动箱;
-偶数个成对布置的偏心配重(eccenter weights),该偏心配重可旋转地安装在振动箱中;
-至少一个驱动马达,该驱动马达用于驱动偏心配重的旋转;
-附接到振动箱的夹具,所述夹具包括用于夹持板桩、管道或其他元件的夹爪;和
-轭,该轭用于将振动锤悬挂在钻机、起重机等上的提升缆绳上,所述轭通过一个或多个振动阻尼元件连接到振动箱。
背景技术
振动锤在本领域中已知用于在土壤中打入或收回板桩、管道、柱等。振动锤实际上悬挂在起重机或钻机或类似设备上。板桩例如由夹具夹持并放在土壤上。通过操作振动箱中的偏心配重,产生振动,振动通过夹具从振动箱传递到板桩和周围土壤中。
常规地,振动锤配备有用于驱动偏心配重的旋转的液压马达。在US2015/0027744A1中示出了这种振动锤的示例。这种所谓的振动锤包括上部配重组(weight set)和下部配重组,各自由液压马达驱动。配重组通过传动装置相互联接,借助该传动装置可以改变配重组之间的相位角。液压马达有利地提供高功率,同时相对紧凑。
作为液压驱动的振动锤的替代方案,已经提出了电驱动的振动锤。优点是不需要液压动力系统,这使得装置更高效、制造起来不太复杂并且减少了维护。
特别地,已知为振动锤配备异步电动马达。在DE 10 2011 103 401 B4中公开了这种振动锤的示例。在这种特定的振动锤中,偏心配重布置成两对。每个偏心配重由单独的异步电动马达驱动,该异步电动马达直接联接到相应偏心配重的偏心轴。在该特定振动锤中,偏心配重之间的相位角可电子地调整。尽管考虑到构造的简单性以及省去了容易磨损和需要维护的液压系统和传动部件,单独的异步马达与偏心配重的轴的直接耦合是非常有吸引力的,但是这种已知的振动锤与液压驱动的振动锤相比是相当庞大的,而电驱动的振动锤能够提供比(较小的)液压驱动的振动锤少得多的动力。因此,这种已知的电驱动的振动锤仅可用于相对轻的应用。此外,更庞大的振动锤更难以在适当位置操纵以定位板桩或其他元件,这削弱了这种电驱动的振动锤的实际使用。
还有已知的更重的电驱动的振动锤,以满足更高的功率要求。然而,在这种情况下,较大的异步马达放置在振动壳体的顶部,其中偏心配重由马达通过环形带传动来驱动。这种振动锤例如在CN 102839667中示出。
发明内容
本发明的目的是提供一种替代的振动锤。
该目的通过一种用于将板桩、管道或其他元件打入土壤或从土壤收回的振动锤来实现,所述振动锤包括:
-振动箱;
-偶数个成对布置的偏心配重,该偏心配重可旋转地安装在振动箱中;
-至少一个驱动马达,该驱动马达用于驱动偏心配重的旋转;
-联接到振动箱的夹具,所述夹具包括用于夹持板桩、管道或其他元件的夹爪;和
-轭,该轭用于将振动锤悬挂在提升缆绳等上,所述轭通过一个或多个振动阻尼元件连接到振动箱,其中所述至少一个驱动马达是同步电动马达。
特别地,同步电动马达是永磁体同步马达(PMSM)。
同步马达,特别是PMSM为振动锤提供了更紧凑的设计,同时该同步马达提供的功率接近液压驱动的振动锤的功率密度(单位体积的功率-W/m
PMSM可以是轴向磁通型或径向磁通型。马达可以是空气冷或水冷的。
径向或轴向磁通型PMSM具有以比标准液压马达高得多的速度运行的可能性(PMSM为10.000rpm,而液压马达为3000rpm)。这提供了以相同的离心力但以较低的惯性振动的机会。
至少一个驱动马达优选地附接到振动箱。振动箱具有垂直于偏心配重的偏心轴的前侧和后侧。PMSM在其中心轴方向上的尺寸非常有限;换句话说,它是相对扁平的。因此,PMSM可以布置在振动箱的前侧或后侧的外侧,而PMSM不会在平行于偏心轴的方向上延伸箱的尺寸。
在另一可能的实施例中,马达可以集成在偏心轴中,其中定子绕组将位于轴内部,并且永磁体将在偏心配重的中空轴内部围绕绕组布置。因此,在该实施例中,定子绕组和永磁体都位于偏心轴内。
在实际实施例中,振动锤包括四个偏心配重,该四个偏心配重布置成一对在另一对之上的两对。一对中的偏心配重的中心轴是平行的,并且在使用中位于一个基本上水平的平面中。一对中的偏心配重的中心轴与另一对中的相应偏心配重的中心轴平行,并且在使用中位于与其基本上垂直的平面中。
尽管如此,具有例如六个、八个或甚至更多个偏心配重的振动锤也是可能的。此外,可以将偏心配重对沿水平方向彼此相邻地定位,而不是将一对定位在另一对之上。
振动锤可以针对每对偏心配重包括一个驱动马达。偏心配重可以通过连接到相应偏心轴的啮合齿轮相互联接。同步电动马达具有驱动轴,该驱动轴可以承载与安装在偏心轴上的齿轮之一配合的齿轮。
可以有承载一个或多个同步齿轮的同步轴,该同步齿轮与两对偏心配重的齿轮啮合,以使这两对偏心配重的旋转同步。同步轴可以包括相位角调节特征,由此可以改变同步轴上的两个齿轮之间的旋转角,从而可以改变偏心配重对之间的相位角。在US 2015/0027744A1中示出了这种相位角调节特征的示例。
在另一可能的实施例中,相应的偏心轴可以直接连接到相关的同步马达(PMSM)的驱动轴。在该实施例中,每个偏心轴和相应的偏心配重因此具有其自己的同步马达(PMSM)。这允许省略齿轮或其他传动元件,以及允许借助控制同步马达的电子控制系统来使偏心配重同步的可能性。而且,一对中的偏心配重之间的相位角的调节可以由电子控制系统完成。相位角的调节也可以在偏心对之间进行。因此,在可能的实施例中,一对中的两个偏心配重之间的同步可以通过齿轮实现,而不同对之间的相位角可以借助控制系统进行电子调节。
在特定实施例中,与每个单独PMSM相关联的频率驱动器或逆变器安装在振动锤上。这减少了必须通向振动锤的电缆的数量和大小。
优选地,提供电子控制系统,该电子控制系统与每个PMSM的频率驱动器或逆变器连接以控制同步马达。控制系统可以被配置为电子控制偏心配重之间的相位角。此外,控制系统可以被配置为提供离心力和速度的成比例控制。优选地,操作和控制振动锤以恒定离心力,但以成比例的速度并因此是振动频率运行,该恒定离心力可以被设置为期望的值。因此,控制系统允许可变地设置离心力,并选择和改变随之发生的频率,从而保持恒定的力。
附图说明
将在以下对可能实施例的详细描述中参照附图来进一步描述本发明,其中:
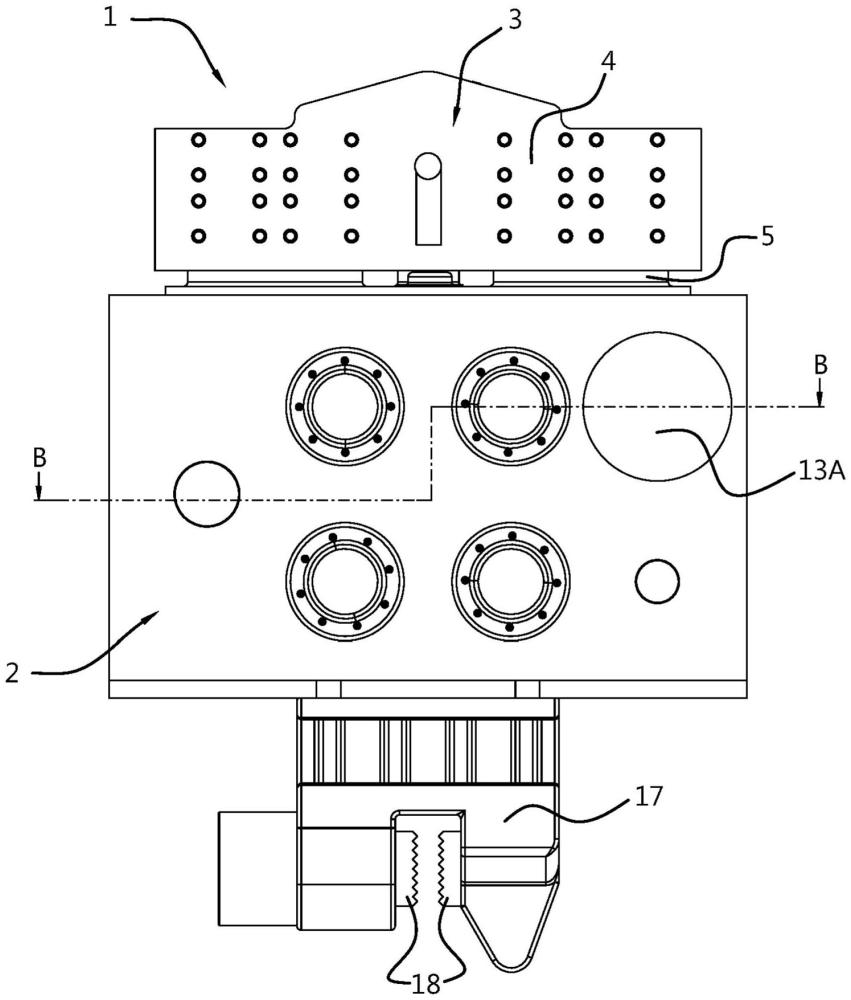
图1示出了根据本发明的振动锤的前视立面图,
图2示出了图1中振动锤的侧视立面图,
图3示出了穿过图2中所示的A-A线的横截面,
图4示出了穿过图1中所示的B-B线的横截面,
图5示出了根据本发明的另一振动锤的前视立面图,
图6示出了图5的振动锤的侧视立面图,
图7示出了穿过图6中所示B-B线的横截面,以及
图8示出了穿过图5中所示的A-A线的横截面。
具体实施方式
在图1至图4中,示意性地示出了振动锤1。振动锤1包括振动壳体2和轭3。
轭3是设计成将振动锤1悬挂在起重机、钻机或类似设备上的部件。轭包括可以与起重机钩状件等配合来将轭附接到起重缆绳上的构件。在该具体实施例中,轭3包括外壳4,外壳4包括钩状装置7,以与起重机、钻机的起重钩状件配合。轭3还包括刚性地附接到振动箱2的内部部件5。内部部件5接纳在外壳4中,并通过多个例如由弹性体材料制成的振动吸收元件6连接到外壳4。振动吸收元件6防止通过运行振动锤1在振动箱2中产生的振动传递到振动锤1悬挂在其上的设备。
在振动箱2中布置有两对旋转偏心配重,其中一对中的偏心配重由附图标记8A表示,另一对中的偏心配重由附图标记8B表示。偏心配重8A和8B各自分别布置在偏心轴9A和9B上。偏心轴9A、9B通过轴承10安装在振动箱2中。齿轮11A和11B分别安装在偏心轴9A和9B上(参见图3)。上部的一对偏心配重8A的偏心轴9A的齿轮11A彼此啮合,由此上部的一对中的两个偏心配重8A彼此同步。类似地,下部的一对偏心配重8B的偏心轴9B的齿轮11B彼此啮合,由此下部的一对中的两个偏心配重8B彼此同步。
在振动箱2的靠近偏心配重对的区域中,将两个永磁体同步马达(PMSM)13A和13B安装到振动箱2外侧。特别地,马达13A布置在振动箱2的前侧。另一马达13B布置在振动箱2的后侧。PMSM的13A、13B各自具有马达轴,马达轴连接到相应的驱动轴12A、12B,驱动轴可旋转地安装在振动箱2中。齿轮14A安装在驱动轴12A上。齿轮14B安装在驱动轴12B上。齿轮14A与齿轮11A之一啮合,齿轮14B与齿轮11B之一啮合。因此,马达13A布置成驱动上部的一对偏心配重8A,并且另一马达13B布置成驱动下部的一对偏心配重8B。
在偏心配重8B对的另一侧,将同步轴15安装在振动箱2中。两个齿轮16A和16B安装在同步轴15上。齿轮16A与齿轮11A之一啮合,并且齿轮16B与齿轮11B之一啮合。因此,通过同步轴15,上部的一对偏心配重8A的旋转与下部的一对偏心配重8B的旋转同步。上部的一对偏心配重8A的偏心轴9A的齿轮11A彼此啮合,由此上部的一对中的两个偏心配重8A彼此同步。在启动或关闭阶段,旋转频率降低,可能发生共振,这可能会对环境,诸如附近的建筑物造成损害。同步轴15可以具有调节机构,该调节机构能够在振动锤1的启动和关闭阶段期间调节上部的一对偏心配重和下部的一对偏心配重之间的相位角,由此可以避免环境的共振。
在振动箱2的下侧,将夹具17附接到振动箱2。夹具17包括夹爪,以夹持待打入土壤或从土壤中收回的板桩的上侧或另一物体的上侧。由旋转偏心配重引起的振动通过夹具17从振动箱2传递到板桩或其他物体中,从而使板桩或其他物体打入其中或从其中收回的土壤振动并松散。
振动锤21的另一可能实施例在图5至图8中示出。在该实施例中,类似的部件由与图1至图4中相同的附图标记表示,对于这些部件的描述,参考前面的描述。该实施例具有四个永磁体同步马达23,这四个永磁同步马达与偏心轴9A、9B成一直线地安装在振动箱2的外部。在该实施例中,同步马达23延伸的相应马达轴直接联接到偏心轴9A、9B。偏心配重8A、8B之间的同步通过控制同步马达23的控制器电子地完成。控制器还可以被配置为在振动锤21的启动和关闭阶段期间负责调节上部的一对偏心配重8A和下部的一对偏心配重8A、8B之间的相位角。
在另一可能的实施例中,振动锤是图1至图4和图5至图8的实施例之间的一种混合,一对中的偏心配重8A或8B由一个马达驱动,并且由齿轮联接因而同步,如图3所示。这些对之间的相位角可以由控制器进行电子控制,而不是使用同步轴15,因此在这样的实施例中省略了同步轴15。
与每个单独的同步电动马达13A、13B、23相关联的频率驱动器或逆变器可以安装在振动锤1、21上,例如安装在轭上或振动箱上。也可以将频率驱动器和逆变器集成到马达中。不位于振动锤上的更高级别的控制系统可以通过有线或无线与频率驱动器和逆变器连接,并且可以用于控制马达13A、13B、23的速度和同步。