一种手术针穿刺导航装置
文献发布时间:2023-06-19 19:37:02
技术领域
本文涉及医疗设备技术,尤指一种手术针穿刺导航装置。
背景技术
手术穿刺针是常用医疗器械,主要应用于临床介入手术。手术针的应用,可直达病症点取样治疗,是医院中必不可少的一款医疗器械。在使用手术针刺入到患者体内进行手术时,需要准确的调节手术针的刺入位置和角度,并在完成穿刺后保证其位置和角度不会发生过大变化,以避免手术针对患者的体内组织造成损伤。
在介入手术的诊疗过程中,由于人手无法精准的控制手术针的穿刺方向,甚至即使在定位完好的情况下,穿刺时由于肌肉阻力和医生手部发力方向与穿刺方向不一致等问题,也会导致手术针与原本的穿刺方向发生偏移。导致手术精度低,并发症比例高,手术失败风险高等情况。
发明内容
本申请提供了一种手术针穿刺导航装置,可以辅助医生开展介入手术,确保术中穿刺方向与术前一致,减小人为的手动穿刺误差。
本申请提供了一种手术针穿刺导航装置,包括:导向机构,用于在手术针穿刺时对手术针进行导向;具有夹持状态和释放状态的夹持机构,所述夹持机构在夹持状态被设置成夹持所述导向机构,所述夹持机构在释放状态被设置成释放所述导向机构,所述夹持机构还被设置成能够自释放状态向夹持状态进行复位;和具有锁定状态和解锁状态的锁定机构,与所述夹持机构配合使用,所述锁定机构在锁定状态被设置成维持所述夹持机构的释放状态,所述锁定机构在解锁状态被设置成解锁所述夹持机构,实现所述夹持机构自释放状态向夹持状态进行复位。
其中:不同内径的导向机构适配不同直径规格的手术针,让医生可以选用最合适的手术针进行手术;夹持机构可以稳定输出恒定力和力矩,保证导向机构的角度和方向维持不变。
在一示例性实施例中,所述夹持机构包括:两个抱爪,其上均设有夹持部、第一铰接连接部和第一活动连接部,所述第一铰接连接部位于所述夹持部和所述第一活动连接部之间;安装座,其上设有第二活动连接部和两个第二铰接连接部,两个所述第一铰接连接部和两个所述第二铰接连接部一一对应铰接连接、并对应设置两个第一复位弹簧,两个所述第一活动连接部与所述第二活动连接部通过连接轴活动连接,所述连接轴可同时在两个所述第一活动连接部和第二活动连接部内往复移动;
所述夹持机构在夹持状态,所述连接轴处于第一位置;
所述夹持机构在释放状态,所述连接轴处于第二位置。
在一示例性实施例中,两个所述第二铰接连接部左右间隔,所述第二活动连接部在左右方向位于两个所述第二铰接连接部之间、在前后方向位于两个所述第二铰接连接部的后方,所述第一位置位于所述第二位置的后方。
在一示例性实施例中,两个所述第一活动连接部均为第一条形孔,所述第二活动连接部为第二条形孔,所述第二条形孔沿前后方向布置,两个所述第一条形孔相对于所述第二条形孔倾斜且对称设置,两个所述第一复位弹簧为扭簧。
在一示例性实施例中,两个所述夹持部相背的一侧还凸设有第一驱动部,所述第一驱动部用于驱动所述夹持机构自夹持状态改变为释放状态。
在一示例性实施例中,所述锁定机构包括锁定件,可移动地安装在所述安装座上,所述锁定件的运动轨迹与所述连接轴的运动轨迹相交,且所述锁定件具有止挡部和避让部,所述锁定件与所述安装座之间设有第二复位弹簧;和解锁件,可移动地安装在所述安装座上,所述解锁件的一端设有第二驱动部、另一端与所述锁定件相配合;
所述夹持机构处于释放状态,所述锁定件处于第三位置,所述连接轴抵在所述止挡部上;
所述夹持机构处于夹持状态,所述锁定件处于第四位置,所述连接轴处于避让部内。
在一示例性实施例中,所述锁定件位于所述第二活动连接部的后侧、并可左右移动地安装在所述安装座上,所述锁定件的左端和所述安装座之间压持有所述第二复位弹簧,所述解锁件位于所述锁定件的右侧、并可左右移动地安装在所述安装座上,所述第三位置位于所述第四位置的右侧,所述止挡部凸设于所述锁定件的左侧前部,所述避让部位于所述锁定件的右侧前部,所述锁定件的运动轨迹与所述连接轴的运动轨迹垂直相交。
在一示例性实施例中,两个所述第一活动连接部上下间隔,所述止挡部和所述避让部在上下方向处于两个所述第一活动连接部之间;
所述夹持机构处于释放状态,所述连接轴上位于两个所述第一活动连接部之间的区域抵在所述止挡部上;
所述夹持机构处于夹持状态,所述连接轴上位于两个所述第一活动连接部之间的区域处于避让部内。
在一示例性实施例中,所述导向机构为导向筒,所述导向筒通过两个所述夹持部进行夹持和释放。
在一示例性实施例中,所述手术针穿刺导航装置还包括:自上向下倾斜布置的安装件,所述夹持机构安装在所述安装件的下端,所述锁定机构安装在所述夹持机构上;光学标记物模块,可拆卸地安装在所述安装件的侧面;和连接法兰,安装在所述安装件的上端,用于与六轴机械臂相连接。
其中,连接法兰用于与六轴机械臂的机械臂法兰相连接。
与相关技术相比,导向机构由夹持机构固定住、并根据手术路径布置好,医生手动穿刺前,使手术针穿设在导向机构内、并沿导向机构进行穿刺,导向机构在手术针穿刺时通过对手术针进行导向,确保术中穿刺方向与术前一致。减小人为的手动穿刺误差,通过合理匹配导向机构和手术针,可以将一次到位率由33.3%提升至83.3%;并发症比例由16.7%降低至0%;手术时间由25min,缩短至11.5min。
本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。本申请的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
附图说明
附图用来提供对本申请技术方案的理解,并且构成说明书的一部分,与本申请的实施例一起用于解释本申请的技术方案,并不构成对本申请技术方案的限制。
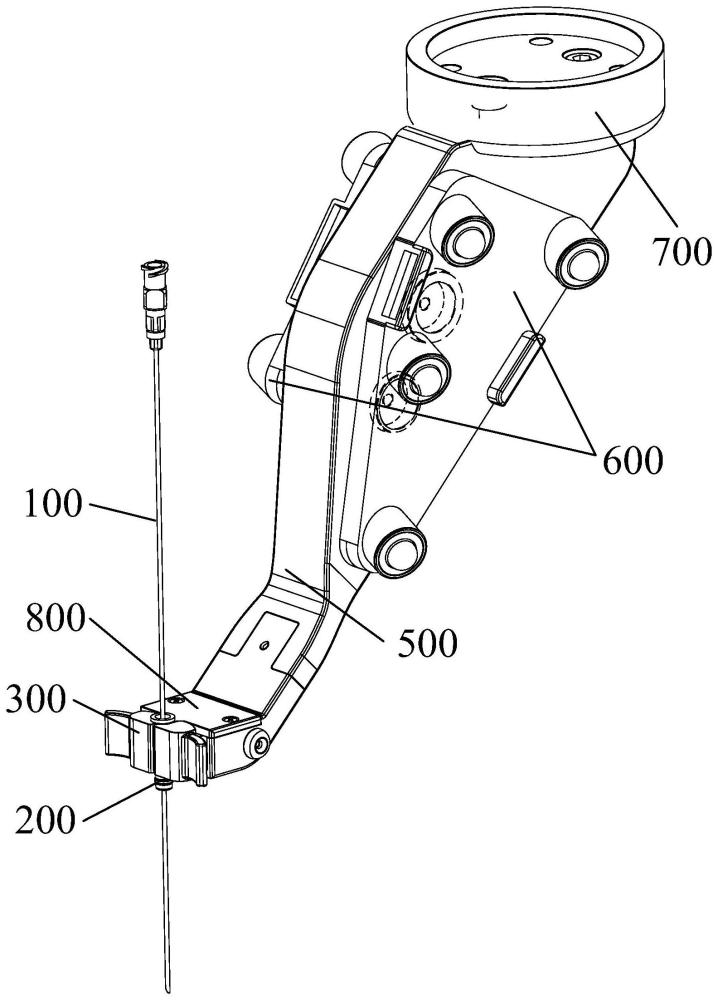
图1为本发明一实施例所述的手术针穿刺导航装置的立体结构示意图;
图2为图1所示手术针穿刺导航装置的局部结构示意图,夹持机构处于夹持状态;
图3为图1所示手术针穿刺导航装置的局部结构示意图,夹持机构处于释放状态,上盖未示出;
图4为图1所示手术针穿刺导航装置的分解结构示意图;
图5为图4中的局部结构示意图;
图6为图5中安装座的立体结构示意图;
图7为图5中上盖的立体结构示意图;
图8为图5中锁定件的立体结构示意图;
图9为图5中抱爪的立体结构示意图。
其中,图1至图9中附图标记与部件名称之间的对应关系为:
100手术针,200导向机构,300夹持机构,310抱爪,311夹持部,312第一铰接连接部,313第一活动连接部,314第一驱动部,320安装座,321第二铰接连接部,322第二活动连接部,323凹腔,330第一复位弹簧,340连接轴,400锁定机构,410锁定件,411止挡部,412避让部,420第二复位弹簧,430解锁件,431第二驱动部,500安装件,600光学标记物模块,700连接法兰,800上盖,801第二铰接连接部,802第二活动连接部。
具体实施方式
本申请描述了多个实施例,但是该描述是示例性的,而不是限制性的,并为使本发明的目的、技术方案和优点更加清楚明白,下文中将结合附图对本发明的实施例进行详细说明。需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互任意组合。
如图1至图9所示,本申请提供了一种手术针穿刺导航装置,包括:导向机构200,用于在手术针100穿刺时对手术针100进行导向;具有夹持状态和释放状态的夹持机构300,夹持机构300在夹持状态被设置成夹持导向机构200,夹持机构300在释放状态被设置成释放导向机构200,夹持机构300还被设置成能够自释放状态向夹持状态进行复位;和具有锁定状态和解锁状态的锁定机构400,与夹持机构300配合使用,锁定机构400在锁定状态被设置成维持夹持机构300的释放状态,锁定机构400在解锁状态被设置成解锁夹持机构300,实现夹持机构300自释放状态向夹持状态进行复位。不同内径的导向机构200适配不同直径规格的手术针100,让医生可以选用最合适的手术针100进行手术;夹持机构300可以稳定输出恒定力和力矩,保证导向机构200的角度和方向维持不变;锁定机构400在锁定状态,维持夹持机构300处于释放状态。
该手术针穿刺导航装置,导向机构200由夹持机构300固定住、并根据手术路径布置好,医生手动穿刺前,使手术针100穿设(即穿装)在导向机构200内、并沿导向机构200进行穿刺,导向机构200在手术针100穿刺时通过对手术针100进行导向,确保术中穿刺方向与术前一致,减小人为的手动穿刺误差,通过合理匹配导向机构200和手术针100,可以将一次到位率由33.3%提升至83.3%;并发症比例由16.7%降低至0%;手术时间由25min,缩短至11.5min。
如图2至图5所示,夹持机构300夹持导向机构200的过程为:
夹持机构300处于释放状态,锁定机构400处于锁定状态,锁定机构400维持夹持机构300的释放状态;医生将导向机构200置于夹持机构300内后,驱动锁定机构400由锁定状态改变为解锁状态,随后夹持机构300自释放状态向夹持状态进行复位,最终夹持机构300夹持住导向机构200。
如图2至图5所示,夹持机构300释放导向机构200的过程为:
驱动夹持机构300自夹持状态改变为释放状态,随后锁定机构400自解锁状态改变为锁定状态,此时锁定机构400维持夹持机构300的释放状态,医生可在夹持机构300上取下导向机构200(或者是导向机构200在重力作用下自行掉落)。
在一示例性实施例中,如图1和图4所示,手术针穿刺导航装置还包括:自上向下倾斜布置的异形的安装件500,夹持机构300安装在安装件500的下端,锁定机构400安装在夹持机构300上;光学标记物模块600,可拆卸地安装在安装件500的侧面;和连接法兰700,安装在安装件500的上端,用于与机械臂法兰相连接。
连接法兰700与机械臂法兰进行连接,根据光学标记物模块600和机械臂法兰来调整夹持机构300的位置,使导向机构200沿手术路径布置好,确保导向机构200更好地导向手术针100沿手术路径进行穿刺。
可以是,机械臂法兰为六轴机械臂的机械臂法兰;或者可以是,机械臂法兰为五轴机械臂的机械臂法兰;或者可以是,机械臂法兰为四轴机械臂的机械臂法兰等;以上均可实现本申请的目的,其宗旨未脱离本发明的设计思想,在此不再赘述,均应属于本申请的保护范围内。
在一示例中,如图4所示,光学标记物模块600通过磁铁可拆卸地安装在安装件500的左侧面和右侧面。可以先在安装件500、夹持机构300和锁定机构400的组合结构上套设灭菌袋,然后再安装光学标记物模块600和导向机构200,这样安装件500、夹持机构300和锁定机构400的组合结构不需要进行消毒,可以极大地简化术前准备工作。
在一示例性实施例中,如图3至图7、图9所示,夹持机构300包括:两个抱爪310,其上均设有夹持部311、第一铰接连接部312和第一活动连接部313,第一铰接连接部312位于夹持部311和第一活动连接部313之间;安装座320,其上设有第二活动连接部322和两个第二铰接连接部321,两个第一铰接连接部312和两个第二铰接连接部321一一对应铰接连接、并对应设置两个第一复位弹簧330,两个第一活动连接部313与第二活动连接部322通过连接轴340活动连接,连接轴340可同时在两个第一活动连接部313和第二活动连接部322内往复移动;其中,夹持机构300在夹持状态(如图2所示),连接轴340处于第一位置(可以结合图2和图3进行理解);夹持机构300在释放状态,连接轴340处于第二位置(如图3所示),两个第一复位弹簧330用于实现夹持机构300自释放状态向夹持状态进行复位,确保夹持机构300稳定输出夹持力和力矩,且夹持机构300处于夹持状态,通过两个夹持部311夹紧导向机构200。
该夹持机构300结构简单,而且体积可以制作的比较小巧,能够确保医生在穿刺时具有充足的可操作空间。
在一实施例中,如图3至图6所示,两个第二铰接连接部321左右间隔,第二活动连接部322在左右方向位于两个第二铰接连接部321之间、在前后方向位于两个第二铰接连接部321的后方,第一位置位于第二位置的后方。
在一实施例中,如图3、图5、图6和图9所示,两个第一活动连接部313均为第一条形孔,第二活动连接部322为第二条形孔,第二条形孔沿前后方向布置,两个第一条形孔相对于第二条形孔倾斜且对称设置,以此来实现连接轴340能够同时在两个第一活动连接部313和第二活动连接部322内往复移动。两个第一复位弹簧330均设置为扭簧。
在一实施例中,如图3至图5、图9所示,两个夹持部311相背的一侧还均凸设有第一驱动部314,第一驱动部314用于驱动两个夹持部311背向运动而打开,以实现夹持机构300自夹持状态改变为释放状态。
其中,如图3、图5和图9所示,每个抱爪310均包括夹持段和安装段,夹持部311和第一驱动部314均位于夹持段,第一铰接部和第一活动连接部313均位于安装段。且两个夹持段在左右方向上处于第二活动连接部322的两侧、在前后方向处于第二活动连接部322的前方,两个安装段均自前向后朝向第二活动连接部322倾斜布置。第一驱动部314设置为抓持板。
在一示例性实施例中,如图3至图5、图8所示,锁定机构400包括锁定件410,可移动地安装在安装座320上,锁定件410的运动轨迹与连接轴340的运动轨迹相交,且锁定件410具有止挡部411和避让部412,锁定件410与安装座320之间设有第二复位弹簧420;和解锁件430,可移动地安装在安装座320上,解锁件430的一端设有第二驱动部431、另一端与锁定件410相配合;其中,夹持机构300处于释放状态,锁定件410处于第三位置,连接轴340抵在止挡部411上(如图3所示);夹持机构300处于夹持状态,锁定件410处于第四位置,连接轴340处于避让部412内(可以结合图2和图3进行理解)。
在一示例性实施例中,如图3至图5所示,锁定件410位于第二活动连接部322的后侧、并可左右移动地安装在安装座320上,锁定件410的左端和安装座320之间压持有第二复位弹簧420,解锁件430位于锁定件410的右侧、并可左右移动地安装在安装座320上,第三位置位于第四位置的右侧,止挡部411凸设于锁定件410的左侧前部,避让部412位于锁定件410的右侧前部、并设置为右侧和前侧贯通的缺口,第二驱动部431位于解锁件431的右端,锁定件410的运动轨迹与连接轴340的运动轨迹垂直相交。
在一实施例中,如图3至图6所示,安装座320上设置有前侧和上部开口的凹腔323,两个抱爪310和锁定件410均位于凹腔323内,第二铰接连接部321和第二活动连接部322均位于凹腔323的下侧壁上,解锁件430呈杆状、并可左右移动地穿设在凹腔323的右侧壁上,第二复位弹簧420压持在凹腔323的左侧壁和锁定件410的左端之间。第二复位弹簧420设置为螺旋弹簧。如图2、图5至图7所示,凹腔323上盖装有上盖800,上盖800上设有第二铰接连接部801和第二活动连接部802。
在一实施例中,如图3和图5所示,两个第一活动连接部313上下间隔,止挡部411和避让部412在上下方向处于两个第一活动连接部313之间。
夹持机构300处于释放状态,连接轴340上位于两个第一活动连接部313之间的区域向后抵在止挡部411上,按压解锁件430的右端,解锁件430推动锁定件410向左移动,止挡部411向左移动而避让开连接轴340,此时连接轴340上位于两个第一活动连接部313之间的区域与避让部412前后正对、并向后移动而进入避让部412内,两个抱爪310在第一复位弹簧330的作用下夹持住导向机构200(即:两个夹持部311相向运动而夹持住导向机构200),连接轴340上位于两个第一活动连接部313之间的区域向后移动进入避让部412内,实现夹持机构300自释放状态改变为夹持状态。
通过两个第一驱动部314驱动夹持机构300自夹持状态改变为释放持状态(即:两个夹持部311背向运动而打开),连接轴340自第一位置向前移动至第二位置,对应的连接轴340自避让部412内向前移出,第二复位弹簧420推动锁定件410和解锁件430一起向右移动,止挡部411向右移动至连接轴340的正后方,松开两个第一驱动部314,两个抱爪310在两个第一复位弹簧330的作用下后推连接轴340,使连接轴340向后抵在止挡部411上,止挡部411维持夹持机构300的释放状态。
在一实施例中,如图2、图4和图5所示,导向机构200设置为柱形的导向筒。柱形可以是圆柱形。
综上所述,本申请提供的手术针穿刺导航装置,导向机构由夹持机构固定住、并根据手术路径布置好,医生手动穿刺前,使手术针穿设在导向机构内、并沿导向机构进行穿刺,导向机构在手术针穿刺时通过对手术针进行导向,确保术中穿刺方向与术前一致,减小人为的手动穿刺误差,通过合理匹配导向机构和手术针,可以将一次到位率由33.3%提升至83.3%;并发症比例由16.7%降低至0%;手术时间由25min,缩短至11.5min。
在本发明中的描述中,需要说明的是,术语“上”、“下”、“一侧”、“另一侧”、“一端”、“另一端”、“边”、“相对”、“四角”、“周边”、““口”字结构”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的结构具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明实施例的描述中,除非另有明确的规定和限定,术语“连接”、“直接连接”、“间接连接”、“固定连接”、“安装”、“装配”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;术语“安装”、“连接”、“固定连接”可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
虽然本发明所揭露的实施方式如上,但所述的内容仅为便于理解本发明而采用的实施方式,并非用以限定本发明。任何本发明所属领域内的技术人员,在不脱离本发明所揭露的精神和范围的前提下,可以在实施的形式及细节上进行任何的修改与变化,但本发明的专利保护范围,仍须以所附的权利要求书所界定为准。