环形导轨机构
文献发布时间:2023-06-19 19:38:38
技术领域
本发明涉及自动化生产线技术领域,特指一种环形导轨机构。
背景技术
现有的自动化生产线,一般包括直线型和环形,直线型不适合多工位加工,环形生产生可以减少占地面积,适合多工位生产。如公开号为206939725U的中国发明专利公开的一种刚性连接的循环精确定位的环形生产线,包括机台,所述机台包括底板,底板上安装车轨道、滑座小车、动力机构和高精密定位机构,车轨道包括两条环形轨道和两条直线轨道,车轨道上安装数个滑座小车;动力机构包括伺服电机、精密行星减速机和高精密凸轮,高精密定位机构包括传动轴和高精密定位块;该专利的缺点在于:生产线的结构比较复杂,滑座小车的移动定位不够准确。
因此,基于上述现有的环形生产线的缺陷,需要对现有的环形生产线进行改进。
发明内容
本发明的目的在于针对现有技术的不足提供一种环形导轨机构,该环形导轨机构解决了现有的环形生产线所存在的:结构比较复杂等缺陷。
为实现上述目的,本发明是通过以下技术方案实现的:环形导轨机构,包括工作台,工作台的上端面安装有主动齿轮、从动齿轮,工作台的下端面安装有电机,电机驱动主动齿轮,主动齿轮、从动齿轮之间连接有环形的链条,工作台的上端面安装有滑轨,滑轨包括直线段、弧形段,直线段、弧形段连接形成环形,滑轨位于链条的外侧,滑轨上滑设有滑座,滑座与链条连接,链条转动时带动滑座沿滑轨滑动,工作台的侧面安装有定位机构,定位机构具有定位杆,滑座的侧面具有定位槽,定位杆的顶端活动卡入滑座的定位槽。
进一步的,所述的定位机构包括第一定位机构、第二定位机构,第一定位机构、第二定位机构分别具有定位杆。
进一步的,所述的工作台的外侧边成型有缺口,缺口处安装有检测传感器,用于检测滑座的位置。
进一步的,所述的滑轨的弧形段外端具有第二定位机构,滑轨的直线段外侧具有第一定位机构。
进一步的,所述的滑座,包括固定板,固定板的下方安装有滚轮,滚轮分别位于滑轨的两侧,固定板的一侧安装有定位板,定位板的外侧开设有定位槽。
进一步的,所述的固定板的另一侧安装有连接板,连接板上开设有条形孔,条形孔安装有连接杆,连接杆的下端固定于链条上。
进一步的,所述的固定板的一端安装有检测定位板,检测定位板上开设有与检测传感器配合的定位孔。
进一步的,所述的第一定位机构,包括安装杆、侧安装板,安装杆固定于工作台的底面,侧安装板安装于工作台下方的支架侧面,安装杆枢接有气缸,气缸的驱动杆连接有连杆,连杆穿设于转轴上,转轴固定有定位杆,转轴的两端固定于侧安装板上。
进一步的,所述的第二定位机构包括安装杆、侧安装板,安装杆固定于工作台的底面,侧安装板安装于工作台下方的支架侧面,安装杆枢接有气缸,气缸的驱动杆连接有连杆,连杆穿设于转轴上,转轴固定有定位杆,转轴的两端固定于侧安装板上。
本发明的有益效果在于:通过电机驱动主动齿轮,带动链条转动,链条带动滑座沿滑轨滑动,所以滑座的移动定位比较准确,适合多工位加工生产。
附图说明
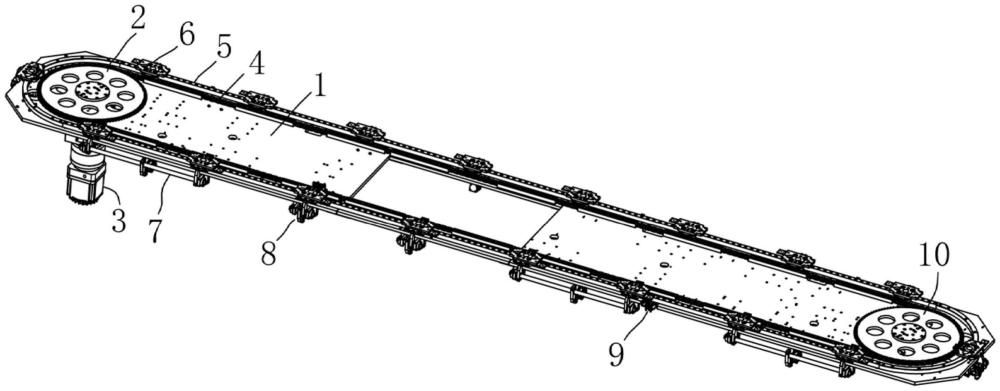
图1为本发明的立体结构示意图。
图2为本发明的俯视结构示意图。
图3为图2的局部放大示意图。
图4为图1的局部放大示意图。
图5为本发明的滑座结构示意图。
图6为本发明的滑座分解结构示意图。
图7为本发明的第一定位机构结构示意图。
标号及说明:
工作台1、主动齿轮2、电机3、链条4、滑轨5、滑座6、第一定位机构7、第二定位机构8、检测传感器9、从动齿轮10、固定板11、滚轮12、定位板13、定位槽14、检测定位板15、定位孔16、连接板17、条形孔18、连接杆19、卡扣20、安装杆21、固定板22、气缸23、连杆24、转轴25、定位杆26、侧安装板27。
具体实施方式
下面结合附图对本发明作进一步的说明。
见图1——图7,本发明环形导轨机构包括:工作台1,工作台1的上端面安装有主动齿轮2、从动齿轮10,工作台1的下端面安装有电机3,电机3驱动主动齿轮2,主动齿轮2、从动齿轮10之间连接有环形链条4,工作台1的上端面安装有滑轨5,滑轨5包括直线段、弧形段,直线段、弧形段连接形成环形,滑轨5位于链条4的外侧,滑轨5上滑设有滑座6,滑座6与链条4连接,链条4转动时带动滑座6沿滑轨5滑动。工作台1的侧面安装有第一定位机构7、第二定位机构8,滑轨5的弧形段外端具有第二定位机构8,滑轨5的直线段外侧具有第一定位机构7,第一定位机构7、第二定位机构8可以旋转,第一定位机构7、第二定位机构8分别具有定位杆26,滑座6的侧面具有定位槽14,定位杆26的顶端活动卡入滑座6的定位槽14内实现滑座6定位,以便进行加工生产。见图4,本发明的工作台1的外侧边成型有缺口,缺口处安装有检测传感器9,检测传感器9用于检测滑座6的位置,确保准确定位以便进行生产。
见图5、图6,本发明的滑座6,包括固定板11,固定板11的下方安装有滚轮12,滚轮12有两组共四个,滚轮12分别位于滑轨5的两侧,通过滚轮12,使滑座6沿滑轨5移动时更平稳。固定板11的一端安装有检测定位板15,检测定位板15上开设有定位孔16,定位孔16用于与检测传感器9配合使用,实现滑座6的位置检测。固定板11的一侧安装有定位板13,定位板13的外侧开设有定位槽14。固定板11的另一侧安装有连接板17,连接板17上开设有2个条形孔18,条形孔18分别安装有连接杆19,两条连接杆19的下端固定于链条4上,两条连接杆19的上端通过卡扣20固定。
见图4、图7,本发明的第一定位机构7,包括安装杆21、固定板22、气缸23、连杆24、转轴25、定位杆26、侧安装板27,安装杆21固定于工作台1的底面,侧安装板27安装于工作台1下方的支架侧面,安装杆21枢接有固定板22,气缸23安装于固定板22上,气缸23的驱动杆连接有连杆24,连杆24穿设于转轴25上,连杆24与转轴25固定、可以一起转动,转轴25的两端分别固定有定位杆26,定位杆26的顶端活动卡入滑座6的定位槽14内,实现滑座6定位,转轴25的两端固定于侧安装板27上。第一定位机构7的转轴25较长,定位杆26有两个,用于两个工位的滑座6定位。
本发明的第二定位机构8与第一定位机构7基本相同,包括安装杆21、固定板22、气缸23、连杆24、转轴25、定位杆26、侧安装板27,安装杆21固定于工作台1的底面,侧安装板27安装于工作台1下方的支架侧面,安装杆21枢接有固定板22,气缸23安装于固定板22上,气缸23的驱动杆连接有连杆24,连杆24穿设于转轴25上,连杆24与转轴25固定、可以一起转动,转轴25上固定有一个定位杆26,定位杆26的顶端活动卡入滑座6的定位槽14内,实现滑座6定位,转轴25的两端固定于侧安装板27上。第二定位机构8的转轴25较短,定位杆26有一个,用于一个工位的滑座6定位。
本发明用于盖板铆接组装机,采用伺服驱动,链条带滑座6输送,以节拍式输送形式输送,每个滑座6输送间距为700mm左右。
当然,以上所述之实施例,只是本发明的较佳实例而已,并非限制本发明实施范围,故凡依本发明申请专利范围所述的构造、特征及原理所做的等效变化或修饰,均应包括于本发明申请专利范围内。