一种实现全自动批量检测的三维扫描装置及方法
文献发布时间:2023-06-19 19:40:14
技术领域
本发明涉及三维扫描技术领域,特别是一种实现全自动批量检测的三维扫描装置及方法。
背景技术
三维扫描系统通过三维扫描仪对空间内的几何构造、三维尺寸进行快速采集,实现工件的自动扫描并形成三维模型,与设计模型自动对准比较,对尺寸、角度、弧度等进行分析并生成报告。可广泛应用于工业设计、逆向工程、医学材料、生物信息、数字文物典藏、游戏创作等领域。
在密闭空间中进行三维扫描或在工厂内对大型构件进行三维扫描时,以往依靠人工操作,费时费力,效率不高。随着机器人技术的发展,采用机器手夹持三维扫描仪自动工作,成为提高三维扫描技术建模速度和建模精度的关键。现有三维扫描只可以自动进行数据采集与建模,但与设计模型的校准比对以及出具检测报告,还无法实现批量自动化,在面对大量重复检测,如何实现提高检测效率,提高自动化程度,是三维扫描以及检测过程中急需解决的问题。
目前从文献可知,CN107121062A专利公开了一种机器人三维扫描装置及方法,阐述了机器手夹持扫描仪进行三维扫描的功能;CN205466149U公开了一种自动三维扫描机器人,将机器人、小车、三维扫描仪4结合到一起;CN107144236A公开了一种机器人自动扫描仪及扫描方法,主要也是阐述机器手和三维扫描仪的结合,实现三维扫描功能。在上述文献中,均阐述了机器手和三维扫描仪的组合使用。但使用有诸多的限制,相同工件每次扫描检测都需要人工,还没有考虑解决批量全自动检测,并出具检测报告。
发明内容
本发明解决的技术问题是:克服现有技术的不足,提供了一种实现全自动批量检测的三维扫描装置及方法。
本发明的技术解决方案是:
第一方面,本发明实施例提供了一种实现全自动批量检测的三维扫描装置,所述装置包括:协作机器人、数据采集端、追踪器、数据分析检测端和移动工作台,其中,
所述协作机器人与所述追踪器连接,所述数据分析检测端分别与所述协作机器人、所述数据采集端、所述追踪器和所述移动工作台电连接,所述数据采集端与所述追踪器电连接;
所述数据分析检测端,被配置为向所述协作机器人发送工作指令,并接收所述数据采集端采集的工件的表面数据,以进行检测并生成检测报告;
所述协作机器人,被配置为根据所述工作指令按照预设轨迹带动所述数据采集端运动;
所述数据采集端,被配置为与所述追踪器相互配合采集放置于所述移动工作台上的工件的表面数据。
可选地,所述数据分析检测端,还被配置为判断是否存在剩余工件,若无剩余工件,则结束检测操作。
可选地,所述数据分析检测端设置有若干控制所述协作机器人的运动路线程序。
第二方面,本申请实施例提供了一种实现全自动批量检测的三维扫描方法,应用于上述任一项所述的装置,所述方法包括:
将待扫描工件放置于移动工作台上;
通过数据分析检测端发出工作开始指令,以控制协作机器人按照预设轨迹带动数据采集端运动;
通过所述数据采集端与追踪器相互配合采集所述待扫描工件的表面数据;
通过所述数据分析检测端获取所述数据采集端采集的所述表面数据,并根据所述表面数据生成所述待扫描工件的检测报告。
可选地,在所述将待扫描工件放置于移动工作台上之前,还包括:
设定若干所述协作机器人和所述移动工作台的运动路线程序,并根据所述运动路线程序组成若干标准化工作流;
保存所述若干标准化工作流。
可选地,在所述将待扫描工件放置于移动工作台上之后,还包括:
对所述装置的全部设备通电。
可选地,在所述通过所述数据分析检测端获取所述数据采集端采集的所述表面数据,并根据所述表面数据生成所述待扫描工件的检测报告之后,还包括:
通过所述数据分析检测端判断是否存在剩余工件;
在不存在剩余工件的情况下,结束检测操作。
本发明与现有技术相比的优点在于:
本发明实施例公开的方案,能够完成批量件全自动扫描检测,并出具报告。将三维扫描仪与机器人进行集成,被侧工件无需贴点,无需喷粉,无需人工干预,极大减少操作人员重复作业,提高了效率。同时,具有逻辑记忆功能,具有真正三维自动扫描检测并出具报告的装置,可在批量用到扫描检测场景中广泛应用。
附图说明
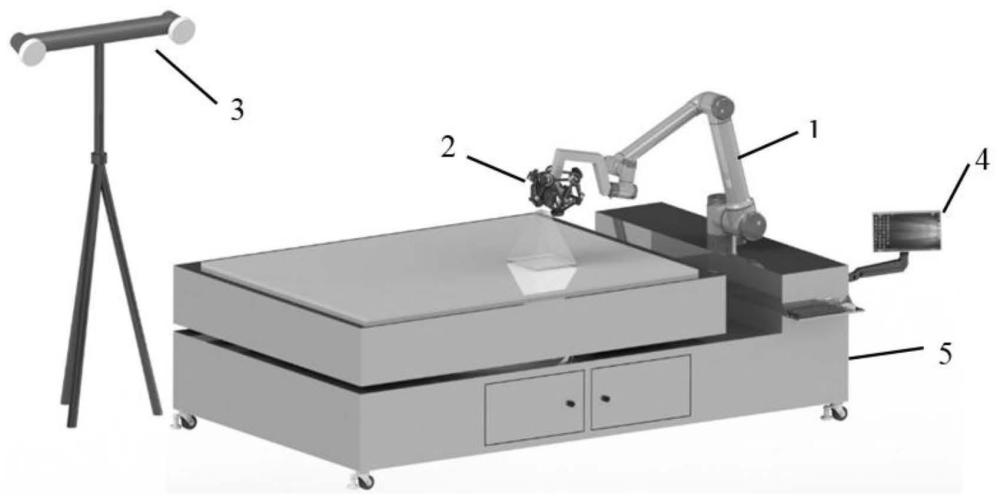
图1为本发明实施例提供的一种实现全自动批量检测的三维扫描装置的结构示意图;
图2为本发明实施例提供的一种实现全自动批量检测的三维扫描方法的步骤流程图;
图3为本申请实施例提供的一种全自动批量检测的三维扫描流程的示意图。
具体实施方式
实施例一
参照图1,示出了本发明实施例提供的一种实现全自动批量检测的三维扫描装置的结构示意图,如图1所示,该实现全自动批量检测的三维扫描装置可以包括:协作机器人1、数据采集端2、追踪器3、数据分析检测端4、移动工作台5,其中,
协作机器人1与追踪器3连接,数据分析检测端4分别与协作机器人1、数据采集端2、追踪器3和移动工作台5电连接,数据采集端2与追踪器3电连接。
在本示例中,协作机器人可以为六轴协作机器人,可为AUBO公司的i7机器手,数据采集端2、追踪器3可以选择型号为SCANTECH的TrackScan-P42。
本申请实施例采用上述三位扫描装置可以实现全自动批量三维扫描,并自动完成对比校验生成检测报告,具有真正三维自动扫描检测并出具报告的装置,可在批量用到扫描检测场景中广泛应用。
该三维扫描装置的工作流程如下:
在数据分析检测端4中预设有若干个控制协作机器手1运动路线程序,组成若干个标准化工作流。在进行工件扫描时,可以选择该工件合适的工作流。
然后,将该工件放置于移动工作台5后,设备全部通电。通过数据分析检测端4上位机发出开始指令,协作机器人1按预订轨迹进行运动,移动工作台5按预订程序进行旋转,数据采集端2与追踪器3互相配合以完成工件表面的数据采集。
数据分析检测端4采集工件表面数据,采集完成后保存采集的工件表面数据,然后自动进行检测并出具本工件的检测报告。数据分析检测端4判断是否还有剩余工件,若无剩余工件,结束整个操作。具体地,数据分析检测端4预设有若干个控制协作机器手1、移动工作台5运动路线程序,组成若干个标准化工作流;设备全部通电,选择工件合适的工作流。待扫描物体放置于移动工作台5后。通过数据分析检测端4上位机发出开始指令,协作机器人1按预订轨迹进行运动,移动工作台5按预订程序进行旋转,数据采集端2与追踪器3互相配合以完成工件表面的数据采集。数据分析检测端4采集工件表面数据,采集完成后保存采集的工件表面数据,进行数字化存储,并可追溯原始数据。然后自动进行检测,并根据预设的检测标准出具本工件的检测报告,给出该工件合不合格明确的信息。数据分析检测端4判断是否还有剩余工件,若无剩余工件,结束整个操作,并出具报告。
实施例二
参照图2,示出了本发明实施例提供的一种实现全自动批量检测的三维扫描方法的步骤流程图,如图2所示,该方法可以包括以下步骤:
步骤201:将待扫描工件放置于移动工作台上。
本申请实施例可以应用于上述实施例一中提供的三维扫描装置。
在具体实现中,可以预先设定若干协作机器人和移动工作台的运动路线程序,并根据运动路线程序组成若干标准化工作流,并由数据分析检测端保存若干标准化工作流。
在获取待扫描工件之后,可以获取待该扫描工件适配的工作流。
在对待扫描工件进行扫描检测时,可以将待扫描工件放置于移动工作台上。同时,控制三维扫描装置上的所有设备通电。
在将待扫描工件放置于移动工作台上之后,执行步骤202。
步骤202:通过数据分析检测端发出工作开始指令,以控制协作机器人按照预设轨迹带动数据采集端运动。
在将待扫描工件放置于移动工作台上之后,可以通过数据分析检测端发出工作开始指令,以控制协作机器人按照预设轨迹带动数据采集端运动。
在通过数据分析检测端发出工作开始指令,以控制协作机器人按照预设轨迹带动数据采集端运动之后,执行步骤203。
步骤203:通过所述数据采集端与追踪器相互配合采集所述待扫描工件的表面数据。
在控制协作机器人按照预设轨迹带动数据采集端运动之后,可以通过数据采集端与追踪器相互配合采集待扫描工件的表面数据。
在采集到待扫描工件的表面数据之后,执行步骤204。
步骤204:通过所述数据分析检测端获取所述数据采集端采集的所述表面数据,并根据所述表面数据生成所述待扫描工件的检测报告。
在采集到待扫描工件的表面数据之后,可以通过数据分析检测端获取数据采集端采集的表面数据,并根据表面数据生成待扫描工件的检测报告。
在具体实现中,数据分析检测端预设有若干个控制协作机器手、移动工作台的运动路线程序,组成若干个标准化工作流。设备全部通电,选择工件合适的工作流。待扫描物体放置于移动工作台后。通过数据分析检测端上位机发出开始指令,协作机器人按预订轨迹进行运动,移动工作台按预订程序进行旋转,数据采集端与追踪器互相配合以完成工件表面的数据采集。数据分析检测端采集工件表面数据,采集完成后保存采集的工件表面数据,进行数字化存储,并可追溯原始数据。然后自动进行检测,并根据预设的检测标准出具本工件的检测报告,给出该工件合不合格明确的信息。数据分析检测端判断是否还有剩余工件,若无剩余工件,结束整个操作,若还有剩余工件,则继续执行上述步骤101至步骤104,直至无剩余工件。
对于三维扫描装置的工作流程可以结合图3进行如下详细描述。
参照图3,示出了本申请实施例提供的一种全自动批量检测的三维扫描流程的示意图,如图3所示,该三维扫描流程可以包括以下过程:
1、放置工件(即将工件放置于移动工作台上);
2、判断该工件是否为首个放置的工件;
3、若该工件为首个放置的工件,则编写系统工作流,然后执行调用工作流的步骤;
4、若该工件为非首个放置的工件,则执行调用工作流的步骤;
5、调用对应工件的工作流,以控制移动工作台旋转,并控制协作机器人带动数据采集端运动;
6、通过数据采集端与追踪器配合采集工件的工件表面数据;
7、保存采集的工件数据,并对采集的工件数据进行检测;
8、自动出具检测报告,并判断是否合格;
9、判断是否存在剩余待检测工件,若存在,则继续执行工件放置移动工作台进行扫描检测的操作;若不存在剩余工件,则结束操作。
本申请实施例能够完成批量件全自动扫描检测,并出具报告。将三维扫描仪与机器人进行集成,被侧工件无需贴点,无需喷粉,无需人工干预,极大减少操作人员重复作业,提高了效率。同时,具有逻辑记忆功能,具有真正三维自动扫描检测并出具报告的装置,可在批量用到扫描检测场景中广泛应用。
本申请所述具体实施方式可以使本领域的技术人员更全面地理解本申请,但不以任何方式限制本申请。因此,本领域技术人员应当理解,仍然对本申请进行修改或者等同替换;而一切不脱离本申请的精神和技术实质的技术方案及其改进,均应涵盖在本申请专利的保护范围中。
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。