一种沥青路面表观病害智能检测修复装置
文献发布时间:2024-01-17 01:21:27
技术领域
本发明涉及沥青路面智能检测修复技术领域,具体的,涉及一种沥青路面表观病害智能检测修复装置。
背景技术
我国高速公路中沥青路面占据了90%以上的比例,受长期交通荷载、自然环境等多种因素影响,沥青路面产生坑槽、裂缝等表观病害,若表观病害未能及时有效治理,极易导致路面结构性破坏,严重影响服役寿命与行车安全。
传统的病害检测修复手段依靠人工携带设备或仪器进行道路检测修复,人工为主的检测修复方式虽然技术成熟但是检测修复效率低、修复质量差且无法保障工作人员的安全,无法满足日益增长的病害检测修复需求。一些无人化的检测修复手段仍处于起步阶段,难以实现自动化巡检修复,并且容易受到周围环境影响导致设备的检测精度和修复效率不理想。
发明内容
为解决背景技术中存在的问题,本发明提供一种沥青路面表观病害智能检测修复装置,包括:
行进机器人,通过控制平台进行远程沉浸式操控或自动化工作,行进轮毂沿工作方向运行,行进机器人上装有激光雷达、高清工业相机、激光扫描仪、控制中心、嵌入式智能解译系统和熔融箱。
所述行进机器人顶端安装三维激光扫描仪和激光雷达,前端两侧分别安装一组高清工业相机,三维激光扫描仪与高清工业相机连接嵌入式智能解译系统,嵌入式智能解译系统用于处理数据信息,实时标定病害区域。激光雷达与控制中心相连,实现道路信息检测与紧急避障。
所述激光扫描仪与高清工业相机组成沥青路面结构表观病害检测模块,激光扫描仪在行进时获取沥青路面病害结构点云数据,通过得到的点云灰度图和深度图像,建立路面病害区域三维点云模型,用于沥青路面结构病害深度信息识别与图像拼接度量框架构建。行进机器人两端工业高清相机在行进时拍摄获取沥青路面图像,基于三维点云模型为度量框架进行图片的预处理及拼接,获得完整高精度的路面表观高清图像数据,实现沥青路面表观病害信息精准定位与病害特征识别。
所述嵌入式智能解译系统位于行进机器人内部与控制中心相连,实时处理三维点云与高清图像数据,基于三维点云模型完成图像融合拼接,得到裂缝或者坑槽的特征数据,病害数据传输至控制中心,控制中心根据病害信息规划最优工作路线并发出工作指令。
可移动搭载平台,连接在行进机器人车体后端,平台设有导轨,其上搭载3D打印修复装置。
3D打印修复装置包括5轴机械臂、修复喷枪、CCD相机和高压清扫装置,安装在搭载平台上,可沿平台导轨水平移动。修复喷枪包括电加热外壳,电加热外壳末端可拆卸连接喷嘴,电加热外壳内同轴设置螺旋推杆,螺旋推杆连接动力装置。3D打印修复装置收到控制中心工作指令后,热熔箱开始加热,修复材料通过输料管进入喷枪,根据规划路径控制机械臂带动喷枪对路面病害进行精准修复。
作为进一步的实现方式,机械臂设置初始位置,3D打印修复装置在接收病害区域修补完成的指令后,机械臂恢复初始置状态。
作为进一步的实现方式,电加热外壳设置温度控制装置,导热内管中设置压力传感器和温度传感器,压力传感器、温度传感器通过信号处理系统连接控制中心,控制喷枪保持稳定的最佳温度。
所述喷枪侧面安装一组CCD相机,用于病害修复区域与完成状况检测,并将数据传输至控制中心。
作为进一步的实现方式,CCD相机内部嵌入解译系统,实现病害区域实时监测。本发明所达到的有益效果为:
第一、本发明的3D打印修复装置能够实现多自由度工作,能够适应复杂环境下路面路面病害检测修复,大大降低交通管制时间,提高材料的利用率,减少了养护成本,实现检测修补的无人化、智能化和高精度。
第二、本发明采用激光扫描仪与高清工业相机结合的检测方式,激光扫描仪构建三维点云模型,两组高清工业相机同时抓拍路面图像信息,并将数据信号发送至嵌入式智能解译系统,解译系统实时处理检测数据,图像先进行预处理消除噪声信息,再以三维点云模型为度量框架进行两组同一时间的图像融合拼接;以点云模型为框架进行图像拼接减少了图像中间断区域及定位错位等因素干扰,得到更加有效一致的高清图像,实现恶劣环境路段下路面病害的精准采集与实时识别。
第三、本发明通过温度传感器、压力传感器、警报器、温度控制装置等构成安全防护,可防止工作中出现高温高压、泄露等安全隐患,提高设备工作可靠性和使用寿命。
附图说明
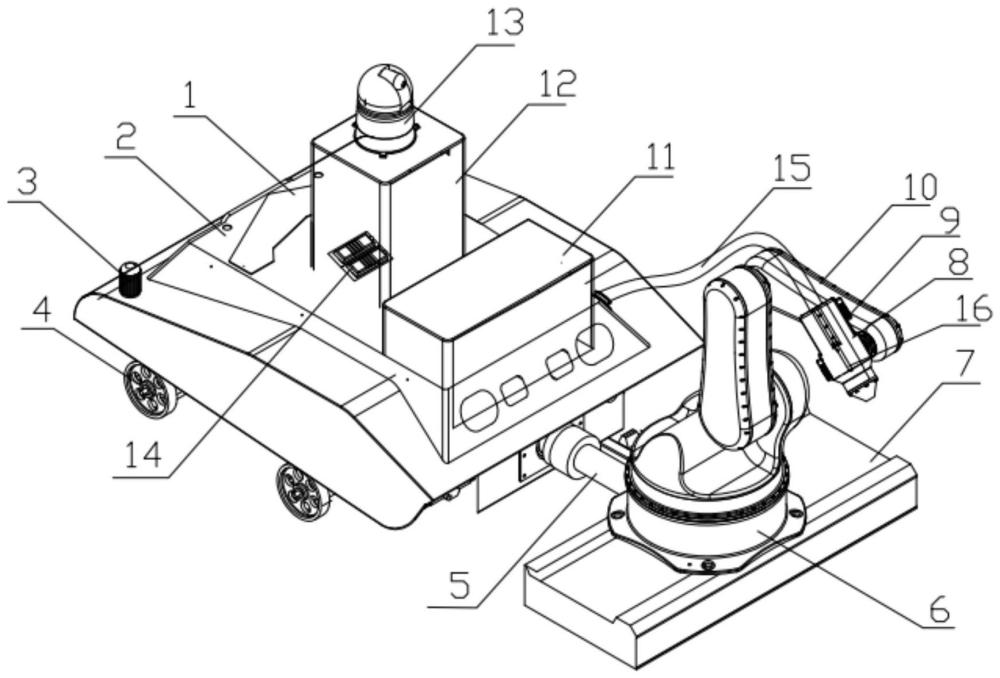
图1是本发明的沥青路面表观病害智能检测修复装置的整体结构示意图。
附图标记及对应名称为:
1、控制中心;2、行进机器人;3、工业高清相机;4、光电编码器;5、快接装置;6、安装底座;7、可移动搭载平台;8、打印喷头;9、CCD相机;10、3D打印装置;11、热熔箱;12、激光扫描仪;13、激光雷达;14、嵌入式智能解译系统;15、真空输料管;16、高压清扫装置。
具体实施方式
下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,另外,在以下的实施方式中记载的各结构的形态只不过是例示,本发明并不限定于在以下的实施方式中记载的各结构,在本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施方式都属于本发明保护的范围。
传统的病害检测修复手段依靠人工携带设备或仪器进入交通道路进行施工,人工为主的检测方式虽然技术成熟但是检测修复效率低、精度低且无法保障工作人员的安全,无法满足日益增长的病害检测修复需求。一些无人化的检测修复手段仍处于起步阶段,难以实现自动化巡检修复,并且容易受到周围环境影响导致设备的检测精度和修复效率不理想。
因此,以下实施例给出了一种沥青路面表观病害智能检测修复装置及方法,通过搭载三维激光扫描仪、高清工业相机、3D打印修复装置、控制中心等设备从而实现对沥青路面结构表观病害的自动化巡检及路面病害的智能检测,旨在解决传统检测修复手段效率低、危险系数高、新兴检测修复手段智能化程度低的弊病。
实施例一:
如图1所示,一种沥青路面表观病害智能检测修复装置,包括控制中心1、行进机器人2、工业高清相机3、光电编码器4、快接装置5、安装底座6、可移动搭载平台7、打印喷头8、CCD相机9、3D打印装置10、热熔箱11、激光扫描仪12、激光雷达13、嵌入式智能解译系统14、真空输料管15和高压清扫装置16。
行进机器人2通过行进轮毂毂沿工作方向运行,轮毂上安装光电编码器4,行进机器人顶部安装两组高清工业相机3、激光扫描仪12和激光雷达13;
激光扫描仪12测量路面结构的三维高程,形成点云灰度图、深度图等数据,激光扫描仪12与嵌入式智能解译系统14相连,解译系统实时处理点云灰度图和深度图像数据,建立裂缝或者坑槽等病害区域的三维点云模型,用于沥青路面结构病害深度信息识别与特征分析,为下一步多组相机高清图像融合拼接搭建度量框架。更优地,激光扫描仪可以获取桥梁、隧道结构点云数据,实现桥梁、隧道结构表观病害检测。
高清工业相机3安装在行进机器人前端两侧,与嵌入式智能解译系统14相连,两组高清工业相机3同时获取沥青路面结构相同时刻、帧率的图像并传输至嵌入式智能解译系统14,解译系统对图像信号进行去噪和二值化处理,处理后的图像以点云模型为度量框架进行同一帧率的多组图片融合拼接,得到包括多个通道的融合拼接特征图。更优地,安装环形阵列相机可以获取桥梁、隧道结构图像数据,实现桥梁、隧道结构表观病害检测;
嵌入式智能解译系统14安装在行进机器人2内部,基于所述融合拼接特征图,确定各通道特征图权重,得到所述路面图像病害检测结果,包括路面病害类别、尺寸信息、位置信息等;基于所述路面图像结果,对比神经网络模型数据库,计算所述融合特征图在指定区域内的特征点的预测特征值和偏移损失,选取最优的喷头运行路线;将所述数据处理结果、最优规划路线发送至控制中心1,实现装备实时检测、解译与修复;
行进机器人前端一侧轮毂安装光电编码器4,可用于检测行进机器人运行速度与行驶里程;
行进机器人底部中心通过快接装置5连接可移动搭载平台7,3D打印修复装置3通过安装底座6固定在可移动搭载平台7上,喷枪8装在机械臂前端,在获得控制中心1工作指令后通过5轴机械臂与搭载平台上的导轨实现XYZ三轴方向上的旋转和移动,喷枪内螺旋推杆运转推动修复材料喷涂在病害位置,实现沥青路面病害精准修复;
行进机器人2安装有热熔箱11,热熔箱11通过真空输料管15连接喷枪8。热熔箱11中根据控制中心指令加热搅拌热沥青、沥青砂浆等修复材料;
CCD相机9安装于打印喷头8上,可随机械臂运动获取不同角度路面图像,用于检测路面病害位置、延伸状态以及裂缝修补状况。更优地,CCD相机安装嵌入式处理系统,实现打印喷头实时独立检测修复,提高修复质量和效率。
高压清扫装置16安装于打印喷头8侧部,可快速清理裂缝、坑槽等病害内部垃圾。
行进轮毂毂连接行进机器人2上,采用步进式电机作为驱动,能够控制设备行进并定位设备工作时所处位置;光电编码器2于前部两侧行进轮毂毂一侧,用于测量机器人行进速度和行驶里程;
激光雷达13安装于激光扫描仪12上部,用于实时监控行进与作业区间内的周围环境,检测的行进路段路况信号传输至控制中心,控制中心紧急情况下可将停止信号传输给行进电机,电机降低功率或紧急制动形成减速或刹车,实现减速行进或紧急避障;
激光扫描仪12搭载至行进机器人顶端,在设备行进时收集沥青路面结构点云数据,通过航位推算与点云坐标转换,建立高精度三维模型,并生产点云灰度及深度影像视图,进而对路面裂缝、坑槽等表观病害信息进行识别与特征分析。
激光雷达进行自身高度调节和纵向运动,激光扫描仪始终保持在水平方向;
激光雷达和激光扫描仪在0~180°范围内运动,随设备推进,激光雷达和激光扫描仪沿环向对轨交沥青路面结构表观病害实现可视化检测。
高清工业相机3安装在行进机器人前端两侧,并嵌入式智能解译系统14相连,两组高清工业相机3通过多路相机一键视野自匹配及图像配准和图像融合等技术,结合嵌入式智能解译系统对图像信号进行去噪和二值化处理,以点云模型为度量框架进行同一帧率的多组图片进行融合拼接,实现路面裂缝、坑槽等表观病害信息精准定姿定位;
嵌入式智能解译系统14安装在行进机器人2内部,点云数据实时处理速度30GB/小时,图像数据13GB/km,考虑到部分数据可在使用后删除或压缩存储,硬盘采用RAID6阵列,允许同时出现1块硬盘损坏而保证不丢失数据。通过点云、图像数据融合同步分析处理,高效识别路面结构表观病害,选取最优的修复路线;将所述数据处理结果、最优规划路线发送至控制中心1,实现装备实时检测、解译与修复;
通过分离式远程控制设备进行病害检测修复,既可实现病害远程遥控工作又可实现设备无人化、智能化工作,保障工作人员的安全同时大幅提高检查修复效率。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。