一种反光标志点区域中心检测方法
文献发布时间:2024-01-17 01:24:51
技术领域
本发明涉及视觉测量技术领域,尤其涉及一种反光标志点区域中心检测方法。
背景技术
在大型物体参数测量时,通常采用在物体表面粘贴视觉标志点的方法,这种方法操作方便,计算量少,同时,由于圆形标志点在不同视角的图像上的成像都是椭圆或者正圆,易于拟合,故视觉标志点大都采用圆形,例如在工厂中拍摄并通过检测标志点计算物体的基本尺寸、在海域平台上测量圆形支柱的平面度等数据、在室内环境中测量车架的部分关键外围尺寸等。
现有的很多应用于摄影测量领域的拍摄设备都是基于工业相机加辅助红色或蓝色光源开发的,直接拍摄的话,在复杂的光照条件下,需要反复调整光源亮度或者曝光参数来获取最好的拍摄效果,也有例如授权公开号为CN104729692B的“一种用于工业摄影测量标志点的测光方法”,通过反复采集多张图片来调整光源亮度从而获取最佳图像的方法,但是也需要拍摄多张图片,才能输出一张效果较好的图像,使得实际的处理与测量效率较低,对于拍摄测量量较大的项目或设备,较为耗费时间与人力。
发明内容
有鉴于此,本发明提出了一种反光标志点区域中心检测方法,通过去的原始图片数据,并在处理后经多步去除不合理光斑区域,并对确定后的反光标志点区域中心进行定位,以提高标志点的检测准确性,同时提高拍摄测量效率。
本发明的技术方案是这样实现的:本发明提供了一种反光标志点区域中心检测方法,包括以下步骤:
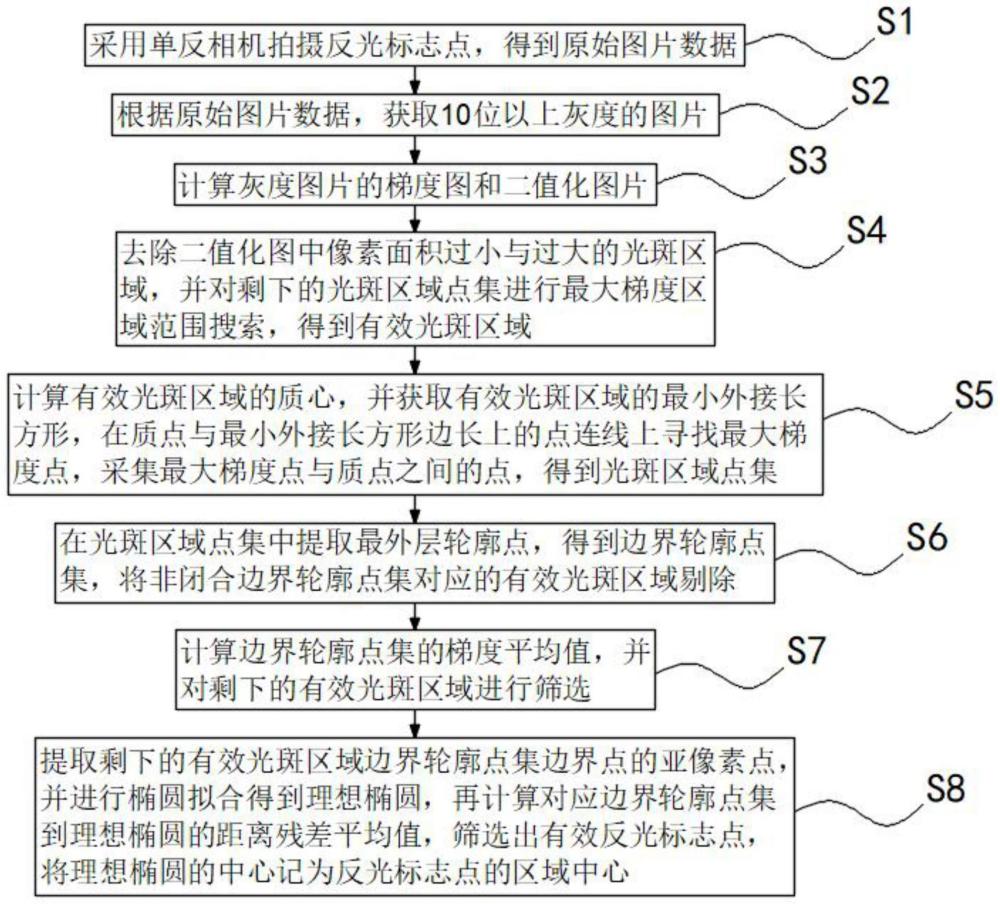
S1、采用单反相机拍摄反光标志点,得到原始图片数据;
S2、根据原始图片数据,获取10位以上灰度的图片;
S3、计算灰度图片的梯度图和二值化图;
S4、去除二值化图中像素面积过小与过大的光斑区域,并对剩下的光斑区域点集进行最大梯度区域范围搜索,得到有效光斑区域;
S5、计算有效光斑区域的质心,并获取有效光斑区域的最小外接长方形,在质点与最小外接长方形边长上的点连线上寻找最大梯度点,采集最大梯度点与质点之间的点,得到光斑区域点集;
S6、在光斑区域点集中提取最外层轮廓点,得到边界轮廓点集,将非闭合边界轮廓点集对应的有效光斑区域剔除;
S7、计算边界轮廓点集的梯度平均值,并对剩下的有效光斑区域进行筛选;
S8、提取剩下的有效光斑区域边界轮廓点集边界点的亚像素点,并进行椭圆拟合得到理想椭圆,再计算对应边界轮廓点集到理想椭圆的距离残差平均值,筛选出有效反光标志点,将理想椭圆的中心记为反光标志点的区域中心。
在以上技术方案的基础上,优选的,所述单反相机为1200万像素以上的全画幅单反相机,且安装有具备高速同步功能的辅助闪光灯。
在以上技术方案的基础上,优选的,所述步骤S2中,还包括通过Dcraw开源库解析单反相机的原始图片数据,进行去马赛克处理,把Bayerpattern图像转换成RGB数据,只提取绿色通道的数据作为灰度图片数据,并对图片进行基础锐化。
在以上技术方案的基础上,优选的,所述步骤S3中的梯度图通过高斯梯度算子计算获得,所述二值化图基于梯度阈值与灰度阈值获得。
进一步优选的,以i表示图片的第i行,j表示图片的第j列,Value(i,j)表示图片第i行第j列像素的灰度值;Grad(i,j)表示图片第i行第j列像素的梯度值;minValue为最小灰度阈值,maxValue为最大灰度阈值,minGrad为最小梯度阈值;Grad(i,j)
在以上技术方案的基础上,优选的,所述步骤S4中,去除二值化图中像素面积过小与过大的光斑区域,包括去除光斑像素面积大于光斑最大像素面积的光斑与光斑像素面积小于光斑最小像素面积的光斑。
在以上技术方案的基础上,优选的,所述步骤S4中,对剩下的光斑区域点集进行最大梯度区域范围搜索,包括将所有光斑区域点集里的所有像素点均标记为内点,每个内点均向八个方向查询其他像素点,若所查询除内点之外的像素点对应的梯度值大于内点的梯度值则将该点标记为内点,进行反复递归式查找,直至无法获取新的像素点作为内点。
进一步优选的,所述步骤S5中,计算有效光斑区域的质心,其中质心为有效光斑区域点集的内点,否则标记为非反光标志点光斑区域。
更进一步优选的,所述步骤S7中,对剩下的有效光斑区域进行筛选,将得到的最外层轮廓点梯度平均值,与最小梯度阈值对比,若最外层轮廓点梯度平均值小于最小梯度阈值,则记为非反光标志点光斑区域。
在以上技术方案的基础上,优选的,所述步骤S8中,还包括设置一个最大残差阈值,残差平均值小于最大残差阈值的边界轮廓点集为反光标志点光斑区域的边界,则其理想椭圆的中心点为反光标志点的区域中心。
本发明的反光标志点区域中心检测方法相对于现有技术具有以下有益效果:
(1)通过获取单反相机拍摄的原始图片数据,与普通灰度图片数据相比具有更为丰富的对比度数值,可使反光标志点的光斑区域与普通背景有更大的灰度值差,并通过梯度阈值、灰度阈值与残差阈值等进行反光标志点的筛选,在确定反光标志点后,再进行标志点区域中心的定位,可大幅度的提高标志点定位的准确度,同时排除外界复杂光照环境的影响,使得操作人员可高效快速的在复杂光照条件下进行测算;
(2)在最初得到的光斑区域经过二值化后,得到的光斑区域可能小于实际标志点的光斑区域,实际标志点的光斑区域边界的梯度值理论上比内部光斑区域的梯度值大,以查找最大梯度点为目标向四周搜索以后,可以搜索到更多的像素点,再通过最小外接矩形的方法,以中心点与矩形边界点连线查找线段上的最大梯度点,最大梯度点与中心点之间的点都为光斑区域的像素点,这样得到的新的光斑区域会更接近实际上的光斑,可提高检测准确性。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明的反光标志点区域中心检测方法的立体图;
图2为本发明的反光标志点区域中心检测方法中单反相机在要求设置下拍摄的处理后的PNG图;
图3为本发明的反光标志点区域中心检测方法中原始数据图片经过步骤S2处理后的原始图。
具体实施方式
下面将结合本发明实施方式,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
现有的很多应用于摄影测量领域的拍摄设备都是基于工业相机加辅助红色或蓝色光源开发的,在室外等复杂光照条件下拍摄的效果都普遍不好,而基于单反相机的的摄影测量设备,直接采用相机处理的图片也无法很好的达到背景与目标分明的图片,并且因为相机自带的图像处理导致了数据精度的失真。
如图1-3所示,本发明的反光标志点区域中心检测方法,其可对复杂光照条件下拍摄的反光标志点图像进行处理,并解决上述问题,具体包括步骤S1-S7。
为了确保摄影测量可以拍摄3m以上距离的几毫米直径标记点,有足够的像素提取,所以需要购买高分辨率的相机,也就是说,有效像素在1000万以上,甚至4千万,在本方案中,所说的单反相机为1200万像素以上的全画幅单反相机,全画幅的高端单反相机,可以确保在更小的曝光下拍摄足够亮度的照片,照片质量更好,同时,拍摄范围也更大,尺寸大,在相同的镜头和光圈下拍摄的视野就大,视野越大,在同样的距离下就可以拍摄更多的标记点,测量范围就更大。
步骤S1:采用单反相机拍摄反光标志点,得到原始图片数据。
单反相机按配置要求在复杂光照条件下进行反光标志点的拍摄,可采用Cannon或Nikon等主流高端单反相机,并安装可支持高速同步功能的辅助闪光灯,在太阳光、暗处或LED光环境下,拍摄贴在测量物体上的反光标志点。为了防止手抖动对拍摄的影响,默认曝光设置到至少180帧/秒(确保采用的单反相机和闪光灯支持指定帧率的同步);拍摄图片设置获取原始图片,并关闭相机的镜头像差矫正、图像亮度矫正等各种修改优化图像数据的功能;光圈打到f11确保在足够景深的情况下;最后根据相机的分辨率大小及标志点的大小,确定最佳的拍摄距离,对相机进行自动对焦后,关闭相机自动对焦功能,进行拍摄获取原始图像数据,由于反光标志点对闪光灯的直色灯光更敏感,这些设置可以获取到背景暗、反光点亮的高质量图片。
在本步骤中,单反相机采用高端的单反相机,相机应支持辅助闪光灯,且支持至少180帧/秒的高速拍摄;原始图片数据可支持拍摄10位、12位等高位的图片;同时可调光圈;从而可以确保在复杂的光照条件下都可以拍摄得到背景暗、反光点亮的高质量原始图片数据。
步骤S2:根据原始图片数据,获取10位以上灰度的图片。
通过Dcraw开源库解析单反相机的原始图片数据(如Cannon相机的.CR2格式)(商业的单反相机都是彩色的感光芯片,实际提供的灰度图片也是通过RGB数据进行合并得到的8位图片),进行Demosaicing去马赛克处理,把Bayerpattern图像转换成RGB数据,再只提取绿色通道的数据作为灰度图片数据,并对图片进行基础锐化(Capture Shaprpening)来提升反光标志点的光斑边缘锐度;从而得到背景更暗、反光标记点的光斑亮度更突出的12位灰度图片,需要说明的是,此处的12位灰度图片是指高位灰度图片,12位灰度图片仅为较优实施例。
步骤S3:计算灰度图片的梯度图和二值化图。
梯度图通过高斯梯度算子计算获得,所述二值化图基于梯度阈值与灰度阈值获得。
具体的,通过高斯梯度算子计算图片的梯度图,并基于梯度阈值和灰度阈值得到一张二值化的图片,即以i表示图片的第i行,j表示图片的第j列,Value(i,j)表示图片第i行第j列像素的灰度值;Grad(i,j)表示图片第i行第j列像素的梯度值;minValue为最小灰度阈值,maxValue为最大灰度阈值,minGrad为最小梯度阈值;Grad(i,j)
步骤S4:去除二值化图中像素面积过小与过大的光斑区域,并对剩下的光斑区域点集进行最大梯度区域范围搜索,得到有效光斑区域。
去除二值化图中像素面积过小与过大的光斑区域,包括去除光斑像素面积大于光斑最大像素面积的光斑与光斑像素面积小于光斑最小像素面积的光斑。
固定分辨率的相机在最大最小拍摄距离下分别拍摄6~12mm直径的标记点,估算出理想的光斑面积范围,即得到光斑最大像素面积与光斑最小像素面积,摄影测量设备都有一定的景深范围,也决定了最远最近的拍摄距离。
基于光斑最大像素面积和最小像素面积,查找光斑区域,即去除像素面积过小与过大的光斑区域,查找所得到的光斑区域,其大小必须小于最大像素面积且大于最小像素面积;得到可能为标志点椭圆光斑的光斑区域点集:Set1_A0{point(i1_0,j1_0),…,point(i1_K,j1_K)},Set2_B0{point(i2_0,j2_0),…,point(i2_P,j2_P)},…,SetN_C0{point(iN_0,jN_0),…,point(iN_Q,jN_Q)};其中,point(i,j)表示图片第i行第j列的像素点;A0,B0,…,C0表示各区域点集的点的个数。
对剩下的光斑区域点集进行最大梯度区域范围搜索,包括将所有光斑区域点集里的所有像素点均标记为内点,每个内点均向八个方向查询其他像素点,具体的,每个内点沿上、下、左、右,左上、左下、右上、右下8个方向查询其他像素点,若所查询除内点之外的像素点对应的梯度值大于内点的梯度值则将该点暂时标记为内点,进行反复递归式查找,直至无法获取新的像素点作为内点,从而得到新的光斑区域点集Set1_A1{point(i1_0,j1_0),…,point(i1_K,j1_K)…,point(i1_T,j1_T)},Set2_B1{point(i2_0,j2_0),…,point(i2_P,j2_P)…,point(i2_Y,j2_Y)},…,SetN_C1{point(iN_0,jN_0),…,point(iN_Q,jN_Q)…,point(iN_L,jN_L)};其中,point(i,j)表示图片第i行第j列的像素点;A1,B1,…,C1表示各区域点集的点的个数。
步骤S5:计算有效光斑区域的质心,并获取有效光斑区域的最小外接长方形,在质点与最小外接长方形边长上的点连线上寻找最大梯度点,采集最大梯度点与质点之间的点,得到光斑区域点集。
计算有效光斑区域的质心,其中质心为有效光斑区域点集的内点,否则标记为非反光标志点光斑区域。
具体的,对所有的光斑区域点集分别通过像素坐标值point(i,j)计算所有光斑轮廓点集的质心,如Set1_A1点集的质心计算如下:
Center_i=(i1_0+…+i1_K+…+i1_T)/A1取整数;
Center_j=(j1_0+…+j1_K+…+j1_T)/A1取整数;
其中,point(Center_i,Center_j)表示图片第Center_i行第Center_j列的像素点,即Set1_A1光斑区域点集的质心点。
得到有效光斑区域的质心后,基于光斑区域计算最小外接长方形;再沿着长方形的边长,以1个像素为步长,寻找边长上的所有像素点与质点之间连线的最大梯度点,并把最大梯度点与质点之间的像素点设为新的区域内点,从而得到新的光斑区域点集:
Set1_A2{point(i1_A0,j1_A0),…,point(i1_AK,j1_AK)},
Set2_B2{point(i2_A0,j2_A0),…,point(i2_AP,j2_AP)},
…,
SetN_C2{point(iN_A0,jN_A0),…,point(iN_AQ,jN_AQ)}。
步骤S6:在光斑区域点集中提取最外层轮廓点,得到边界轮廓点集,将非闭合边界轮廓点集对应的有效光斑区域剔除。
基于光斑区域点集提取最外层轮廓,把最外层轮廓点设置为边界点,得到边界轮廓点集:
BSet1_A2{point(i1_B0,j1_B0),…,point(i1_BF,j1_BF)},
BSet2_B2{point(i2_B0,j2_B0),…,point(i2_BG,j2_BG)},
…,
BSetN_C2{point(iN_B0,jN_B0),…,point(iN_BT,jN_BT)}。
基于边界轮廓点集以第一个边界点为起点连接顺时针方向的边界点,检测边界轮廓是否首尾相邻构成闭合轮廓,如果不是闭合轮廓则为非反光标志点光斑区域。
步骤S7:计算边界轮廓点集的梯度平均值,并对剩下的有效光斑区域进行筛选。
计算边界轮廓点集的所有边界点的梯度平均值,梯度平均值大于或等于minGrad的边界轮廓点集为反光标志点光斑区域,其中的minGrad即为步骤S3中的最小梯度阈值,同理,梯度平均值小于minGrad的边界轮廓点集为非反光标志点光斑区域。
步骤S8:提取剩下的有效光斑区域边界轮廓点集边界点的亚像素点,并进行椭圆拟合得到理想椭圆,再计算对应边界轮廓点集到理想椭圆的距离残差平均值,筛选出有效反光标志点,将理想椭圆的中心记为反光标志点的区域中心。
把所有有效的边界轮廓点集的边界点进行亚像素提取,即基于边界点的梯度方向和X,Y方向的梯度值寻找梯度最大的亚像素点,再基于亚像素点集坐标进行椭圆拟合,得到理想椭圆方程,并计算边界点到椭圆方程的距离残差平均值,设置一个最大残差阈值,残差平均值小于最大残差阈值的边界轮廓点集为反光标志点光斑区域的边界,则其理想椭圆方程的中心点为反光标志点的区域中心。
以上所述仅为本发明的较佳实施方式而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。